

Тема задания самостоятельной работы студенту
Трацевскому в. С.
«Электронное устройство для управления шаговым двигателем»
Оформление отчета по самостоятельной работе
Отчет должен быть оформлен по ЕСКД и в соответствии с /1/. Объем отчета составляет 20 – 25 страниц формата А4 с параметрами страницы: слева – 25 мм; справа, сверху и снизу по 15 мм; шрифт – 12 кегль: межстрочный интервал – одинарный.
Отчет должен содержать:
Титульный лист.
Реферат
Задание
Введение
Описание устройства
Описание принципиальной электрической схемы
Заключение
Литература
Литература
1. Проекты (работы) дипломные. Требования и порядок подготовки, представления к защите и защиты: СТП БГТУ 001-2010. – Введ. 03.03.2010. – Минск: БГТУ, 2010.
Схемотехнические измерительные устройства: учебн. Пособие. – СПб.: Издательство «Лань», 2009.
Игнатов, А. Н. Оптоэлектрические приборы и устройства. / А. Н. Игнатов
2. Научно-технические журналы:
2.1 Силовая электроника.
2.2 Компоненты и технологии.
2.3 Современная электроника.
2.4 Электронные компоненты и системы.
2.5 Датчики и системы.
2.6 Микросистемная техника.
2.10 Приборы
3. Электронный ресурс (например)
2.7 www.eworld.ru
2.8 www.hitachi.co.jp/Div/ise/pdevice/ic/ic-se.htm
4. Прочая научно-техническая литература.
2.9 Полупроводниковая техника фирмы Semicron.
2.10 Полупроводниковая техника фирмы Simens.
и т. п.
Системы и схемы управления шаговыми двигателями без обратной связи
Одной из наиболее важных проблем при использовании ШД является разработка систем управления без обратной и с обратной связью по положению ротора. В этой главе рассмотрены системы управления без обратной связи.
1.1. Система управления
Простая система управления для ШД показана на схеме рис. 1.1.
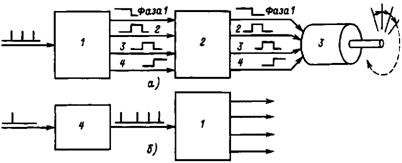
Рис. 1.1. Схема системы управления ШД: 1 - логический блок; 2 - коммутатор; 3 - двигатель; 4 - входной контроллер.
Для удобства объяснения она разделена на две части, ШД в примере четырехфазный на рис. 1.1, а представлена часть системы управления от логического блока до двигателя.
Сигнал управления, приходящий на логический блок, обеспечивает подачу сигнала управления на коммутатор, тем самым способствуя перемещению ротора двигателя на один шаг. Направление вращения определяется логическим состоянием входа, т.е. Н-уровень для вращения по часовой стрелке и L-уровень против часовой стрелки. В некоторых случаях применяются логические блоки с не зависящим от направления выходным сигналом. Если один инкремент движения осуществляется за один шаг, то на схеме рис. 1.1, а представлена вся система управления. Но если шагов два или больше, то перед логическим блоком необходимо поставить еще одно устройство для создания соответствующей инкременту цепочки входных импульсов. Это устройство называется входным контроллером (рис. 1.1, б). В сложных случаях функцию входного контроллера выполняют такие электронные устройства, как микропроцессоры, которые генерируют цепочки импульсов для ускорения или замедления движения оптимальным образом.
1.2. Логические блоки системы управления
Логический блок — это логическая схема, которая управляет последовательностью возбуждения обмоток в соответствии с поступлением входных импульсов. Обычно логический блок состоит из регистра сдвига и логических схем (функций) таких, как НЕ-И, НЕ-ИЛИ и т.д. В настоящее время в качестве регистра сдвига применяют универсальные схемы. Однако для конкретных целей можно сконструировать необходимый логический блок подбором соответствующей интегральной микросхемы, реализующей триггер с логическим входом, срабатывающий по обратному фронту сигнала управления (триггеры JK-FF), и логических схем. Базисные функции схем и триггеров приведены на рис. 1.2.
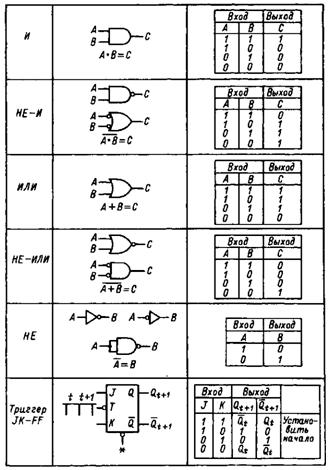
Рис. 1.2. Логические блоки и их функции
Триггер JK-FF реализует функцию, задаваемую таблицей и выполняемую тогда, когда на вход* поступает сигнал Н. Если на вход* поступает сигнал L, то на выходе О будет сигнал L, а на Q - Н. Поэтому вместо составления логического блока из набора соответствующих интегральных микросхем можно использовать универсальные логические блоки, разработанные для ШД.