

1. Кинематический анализ автомата для прессования пластмасс.
1.1 Краткое описание конструкции и работы автомата для прессования пластмасс.
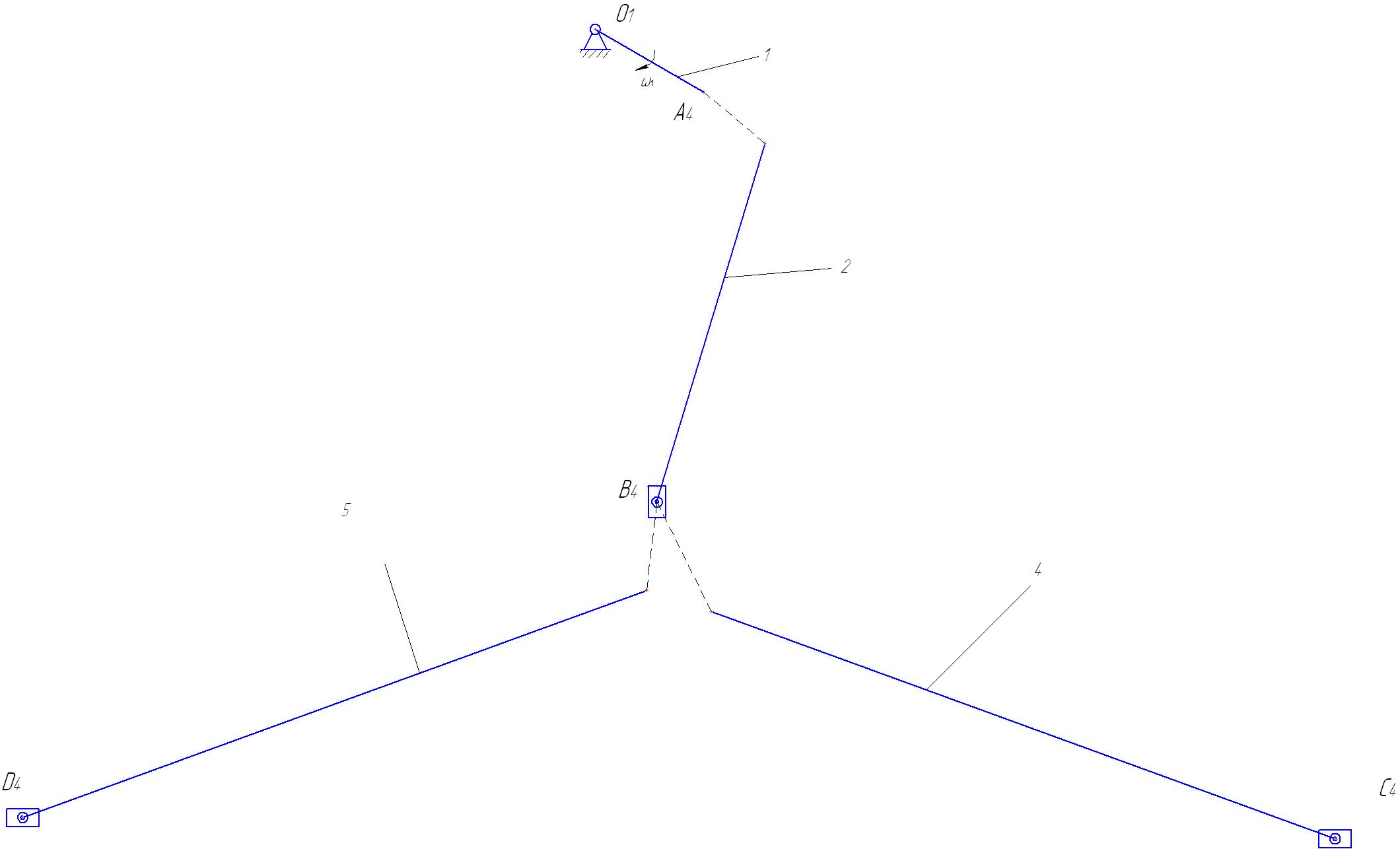
Автомат для прессования пластмасс предназначена для горячей штамповки изделий из пруткового металла ограниченной длины в матрице с разъемом в вертикальной плоскости .
Машина содержит два исполнительных механизма : основной высадочный механизма и механизм зажима заготовки . Высадочный механизм состоит из кривошипа 1, шатунов 2 и ползуна 3.
Кривошип приводится в движение от электродвигателя при помощи планетарного редуктора и цилиндрической зубчатой передачи z4-z5.
Высадочный ползун с закрепленным на нем пуансоном ,совершая возвратно-поступательное движение , осуществляет деформацию заготовки ,зажатой в матрице.
1.2.Определение длин звеньев.
Необходимо определить длины звеньев, следуя из истинных длин, приведённых в исходных данных.


Определим масштаб Кl :
Kl = lист / lчерт = lO1A / lчерт =0,089 м /50 мм = 0,00178 м/мм;
О1А= 0,089 м =50 мм; АВ=0,3115 м =175 мм;
ВС=0,391 м =219,7 мм; НС=0,066 м=37 мм.
1.3.Структурный анализ механизма.
Определение структурного анализа механизма необходимо для выбора метода кинематического и силового анализа.
В механизме имеется 7 кинематических пар, 6 из которых допускают вращательное движение звеньев (O1 - 1, 1 - 2, O2 - 3, 2 - 3, 3 - 4, 4 - 5) и 1 - поступательное (В - C). Все кинематические пары 5-класса.
Степень подвижности механизма вычисляется по формуле Чебышева :
W = 3 * n - 2 * p5 - 1 * p4, где
n - число подвижных звеньев;
p5 - число пар пятого класса;
p4 - число пар четвертого класса;
W = 3 * 5 - 2 * 7 = 1.
Ведущим является звено O1A. Ведомая часть механизма состоит из 2 групп Ассура.
Формула строения механизма : I (O1, 1) -> II(2, 3) -> II(4, 5).
Т. к. максимальные класс групп Ассура, входящих в механизм, - второй, то класс всего механизма так же второй.
1.4. Определение масштабов Kl, Kv, Ka.
Изображение кинематической схемы механизма в выбранном масштабе, соответствующее определенному положению входного звена, называется планом механизма. Масштаб плана механизма определяется отношением числового значения длины изображаемого звена в метрах к длине отрезка на плане в мм т.е
Масштаб плана механизма :
Kl = lист / lчерт = lO1A / lчерт =0,089 м /50 мм = 0,00178 м/мм;
Планом скоростей механизма называют чертеж, на котором изображены в виде
отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент. План скоростей для механизма является совокупностью нескольких планов скоростей для отдельных групп Ассура, а значит, и отдельных звеньев .
Определяем угловую скорость ведущего звена:
ω 1= ( π * nz1 ) / (u1-5 * 30) = (3,14 * 1800 об/мин/ (18* 30) = 10,46 рад/с;
Масштаб планов скоростей :
Kv = Vист / Vчерт = VA / VA(черт) =
=(ω1* lO1A) / VA(черт) = (10,46 рад/с * 0,089 м) / 50 мм = 0,0186 (м/с)/мм;
Чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент, называют планом ускорений механизма. Векторы, имеющие начало в полюсе плана скоростей или ускорений, называются абсолютными.
Масштаб планов ускорений:
Ka =laист / lчерт = aA / aA(черт) = (ω 21 * lO1A) /
=aA(черт) = (10,46 2 рад/с * 0,089 м) / 50 мм = 0,195 (м/с2)/мм.