

36.Инерциальные навигационные системы. Принцип работы, погрешности.
(интернет)
Инерциальная навигационная система
система инерциальной навигации, навигационное устройство, в основу работы которого положены классические (ньютоновские) законы механики. В И. н. с. исходной (главной) системой отсчёта, по отношению к которой производятся инерциальные измерения, служит инерциальная (абсолютная, т. е. неподвижная относительно звёзд) система. Посредством И. н. с. определяют координаты, скорость, ускорение и др. основные параметры движения объекта (самолёта, ракеты, космического корабля, надводных и подводных судов и др.). И. н. с. имеют перед другими навигационными системами (см. Радионавигационная система) большие и важные преимущества — универсальность применения, возможность определения основных параметров движения, автономность действия, абсолютную помехозащищенность. Эти качества определили И. н. с. как наиболее перспективную навигационную систему.
Принцип действия И. н. с. состоит в моделировании (представлении) поступательного движения объекта, характеризуемого изменением во времени ускорения, скорости и координат, подобным процессом движения воспринимающего элемента (массы) пространственного (трёхкомпонентного) Акселерометра (в общем случае с компенсацией гравитационного ускорения). Уравнение движения воспринимающего элемента в инерциальной системе координат является основным уравнением инерциального метода определения параметров движения; в общем случае имеет вид:

где ω̅ — ускорение, измеряемое акселерометром; — сила притяжения единицы массы воспринимающего элемента в точке М (ускорение тяготения).
Сущность инерциального метода (рис.) состоит в измерении акселерометром исходного параметра (ускорения) и интегрировании основного уравнения: одинарном — для определения скорости, двойном — для определения координат. Ориентирование измерительных осей акселерометров по заданным направлениям производится свободными или управляемыми (по сигналам от акселерометров) гироскопическими устройствами (См. Гироскопические устройства) (гироскопом, гиростабилизатором, гирорамой и др.) или астростабилизаторами, а также сочетанием этих средств. Для интегрирования основного уравнения используются гироскопические, электромеханические и др. Интеграторы. И. н. с. содержит построитель (инерциальная вертикаль) или вычислитель направления вертикали места. Инерциальная вертикаль является высокоточной вертикалью и не возмущается (не отклоняется от вертикали места) при наличии горизонтальных ускорений.
И. н. с. различают по ряду признаков: по ориентации направлений осей чувствительности инерциальных измерителей (с произвольной ориентацией, с ориентацией по звёздам, по осям, жестко связанным с объектом, с неизменной ориентацией относительно небесного тела, например Земли, с горизонтальной ориентацией и др.); по способу построения вертикали места (с аналитической, или расчётной, вертикалью, с инерциальным построителем вертикали); по наличию стабилизированной платформы (со стабилизированной гироскопической или астроплатформой, бесплатформенные) и др.
И. н. с. весьма сложны, дорогостоящи. Срок службы их меньше, чем у обычных гироскопических приборов. Для правильного функционирования И. н. с. перед стартом объекта требуется ввести начальные данные по координатам пункта старта и скорости, произвести ориентирование инерциальных измерителей. Точность некорректируемых И. н. с. зависит от времени. Поэтому возможность получения информации от И. н. с., удовлетворяющей заданным требованиям, ограничена во времени. Так, за час полёта лучшие образцы И. н. с. имеют погрешность в определении координат примерно 1,5—5 км. Для уменьшения погрешностей и расширения возможностей использования применяют различные способы коррекции от радионавигационных, радиолокационных и астронавигационных средств.
(Лит.: Принципы инерциальной навигации, пер. с англ., под ред. В. А. Боднера, М., 1965; Помыкаев И. И., Инерциальный метод измерения параметров движения летательных аппаратов, М., 1969. И. И. Помыкаев.)
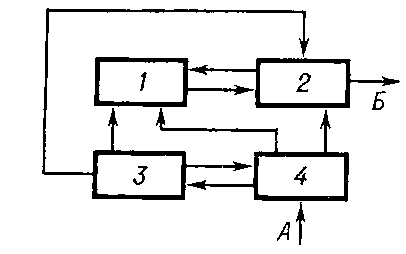
Блок-схема инерциальной навигационной системы: 1 — блок инерциальных измерителей и построителей направлений в пространстве (акселерометры и гироскопические устройства), посредством которого реализуется заданная ориентация измерительных осей и с которого выдаётся измерительная информация в вычислитель; 2 — вычислительный блок, в котором осуществляются интегрирование основного уравнения, вычисление необходимых параметров движения, формирование сигналов (в некоторых инерциальных навигационных системах) управления ориентацией инерциальных измерителей и сигналов компенсации систематических погрешностей (ускорения тяготения, поворотного ускорения, от несферичности Земли и др.); 3 — блок времени, из которого в блоки 1, 2, 4 поступают сигналы мирового времени; 4 — блок ввода начальной информации в блоки 1 и 2 для ориентации инерциальных измерителей и интегрирования основного уравнения; А — поступление начальной информации; Б — выдача конечной информации о параметрах движения. Стрелками показаны направления поступления информации.
(пособие по ЗН)
ИНС. Инерциальные навигационные системы являются автономными система-
ми определения местоположения ВС на основе счисления координат. Измеренные
акселерометрами ускорения ВС по трем осям координат интегрируются цифровым
вычислителем, что дает возможность получить координаты места ВС и всю другую
необходимую для навигации информацию.
В традиционных ИНС акселерометры устанавливают на стабилизированной по
азимуту и вертикали гироплатформе. В современных ИНС платформа отсутствует,
акселерометры жестко связаны с ВС, а их угловая ориентация определяется по сиг-
налам лазерных датчиков угловых скоростей (на отечественном авиационном сленге
их называют «лазерными гироскопами», что, по сути, конечно, неправильно).
Общей чертой любой системы счисления пути является возрастание погрешно-
стей определения координат с увеличением продолжительности полета, поэтому их
и характеризуют величиной «ухода» счисленного места самолета от фактического за
час полета. В «Руководстве по требуемым навигационным характеристикам» приве-
дено значение этой величины, равное 1,5 – 2 м. мили за час, но современные бес-
платформенные ИНС обеспечивают и более высокую точность. Так, по эксперимен-
тальным данным, полученным в АО «Аэрофлот» на самолетах Ил-96-300, на кото-
рых установлена американская ИНС «Litton-90-100», средняя квадратическая ради-
альная погрешность определения места самолета этими системами имеет порядок
0,5 м. миль в час.
Тем не менее, по причине возрастания погрешностей ИНС не могут использо-
ваться в качестве оборудования RNAV без периодической коррекции счисленных
координат по другим средствам (СНС, DME и т.д.). На борту ВС обычно устанавли-
вается три одинаковых комплекта ИНС, что позволяет повысить точность и надеж-
ность навигации. Для повышения функциональной надежности системы и увеличе-
ния возможной продолжительности полета до очередной коррекции координат в со-
временных навигационных комплексах используются различные алгоритмы ком-
плексной обработки информации - от простого осреднения координат, выданных
тремя идентичными ИНС, до сложных алгоритмов оптимальной фильтрации.
Следует отметить, что в настоящее время роль систем счисления пути в нави-
гационных комплексах меняется на прямо противоположную. На протяжении долгого
времени они использовались как основное средство, позволяющее непрерывно оп-
ределять координаты, а другие средства использовались только для коррекции. Те-
перь же, с появлением СНС, которые также практически непрерывно выдают гораз-
до более точные координаты, системы счисления пути уже стали играть роль вспо-
могательного средства, которое используется для контроля спутниковой информа-
ции, а также для определения места ВС в те непродолжительные промежутки вре-
мени, когда целостность СНС не обеспечивается. Такой подход реализован при раз-
работке отечественной навигационной интегрированной системы НСИ-2000, а также
в некоторых других зарубежных и российских навигационных системах.
Наличие в составе навигационного комплекса ИНС, СНС и цифрового вычисли-
теля полностью обеспечивает решение всех задач RNAV, включая ввод и сохране-
ние маршрута полета, наведение по линии пути.