

Министерство образования и науки российской Федерации
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
«Российский государственный профессионально-педагогический университет»
Машиностроительный институт
Кафедра материаловедения и технологии контроля в машиностроении и методики профессионального обучения
ЗАДАНИЯ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ
К ВЫПОЛНЕНИЮ ПРАКТИЧЕСКИХ РАБОТ
ПО ДИСЦИПЛИНЕ
« ОСНОВЫ РАСЧЕТА И ПРОЕКТИРОВАНИЯ ИЗМЕРИТЕЛЬНЫХ МЕХАНИЗМОВ»
для студентов всех форм обучения
направления подготовки051000.62Профессиональное обучение (по отраслям)
профиля подготовки «Машиностроение и материалообработка»
профилизации «Сертификация, метрология и управление качеством в машиностроении»
Екатеринбург
РГППУ
2013
Задания и методические указания к практическим работам по дисциплине «Основы расчета и проектирования измерительных механизмов» .
ФГАОУ ВПО «Рос. гос. проф.-пед. ун-т». Екатеринбург, 2013,39с.
Составитель: канд. техн. наук., доц. Г.Н. Мигачева.
Приведены практические работы по структурному синтезу механизмов, расчету деталей машин и зубчатых механизмов.
Одобрены на заседании кафедры материаловедения, технологии контроля в машиностроении и методики профессионального обучения. Протокол от 17 января 2013 г. № 6.
Заведующий кафедрой КМ Б.Н. Гузанов
Рекомендованы к печати методической комиссией Машиностроительного нститута ФГАОУ ВПО РГППУ. Протокол от 13 февраля 2013 г. № 6 .
Председатель методической
комиссии МаИ РГППУ А.В. Песков
© ФГАОУ ВПО «Российский
государственный профессионально-
педагогический университет». 2013.
© Г.Н. Мигачева.2013.
Целью преподавания дисциплины «Основы расчета и проектирования измерительных механизмов» является изучение способов проектирования различных типов механизмов, обеспечивающих точность измерения на измерительных устройствах, формирование теоретических и практических знаний и умений, необходимых для деятельности по специализации.
Основными задачами изучения дисциплины являются:
формирований знаний об основах проектирования механизмов различного типа;
овладение умениями по выбору структурной схемы (типа) механизма, обеспечивающей точность измерения, и проектированию основных типов измерительных устройств;
овладение умениями по применению теоретических знаний по изучаемой дисциплине.
В результате выполнения практических работ студент должен
Знать:
основную номенклатуру механизмов;
основные понятия и положения структурного анализа типовых механизмов;
основы проектирования рычажных, резьбовых и зубчатых механизмов; Уметь:
выбирать структурные схемы измерения;
Владеть:
современными методами проектирования деталей измерительных механизмов;
Практическая работа № 1
Тема: Структурный синтез механизмов
Цель занятия: знакомство с элементами структуры механизма, расчетом подвижности, устранением избыточных связей.
Оснащение: методические указания по выполнению практической работы.
Работа рассчитана на 4 академических часа.
1. Общие теоретические сведения.
Для изучения строения механизма используется его структурная схема. Часто эту схему механизма совмещают с его кинематической схемой. Так как основными структурными составляющими механизма являются звенья и образуемые ими кинематические пары, то под структурным анализом понимается анализ самих звеньев, характер их соединения в кинематические пары, возможность проворачиваемости, анализ углов давления. Поэтому в работе даются определения механизма, звеньев, кинематических пар. В связи с выбором способа исследования механизма рассматривается вопрос о его классификации. Приводится классификация, предложенная Л.В.Ассуром. При выполнении лабораторной работы используются модели плоских рычажных механизмов, имеющихся на кафедре.
Механизм - это система взаимосвязанных твердых тел с определенными относительными движениями. В теории механизмов упомянутые твердые тела называют звеньями.
Звено - это то, что движется в механизме как одно целое. Оно может состоять из одной детали, но может включать в себя и несколько деталей, жестко связанных между собой.
Основные звенья механизма - это кривошип, ползун, коромысло, шатун, кулиса, камень. Указанные подвижные звенья монтируются на неподвижной стойке.
Кинематическая пара - это подвижное соединение двух звеньев. Кинематические пары классифицируются по ряду признаков - характеру соприкосновения звеньев, виду их относительного движения, относительной подвижности звеньев, по расположению траекторий движения точек звеньев в пространстве.
Для исследования механизма (кинематического, силового) строится его кинематическая схема. Для конкретного механизма - в стандартном машиностроительном масштабе. Элементами кинематической схемы являются звенья: входное, выходное, промежуточные, а также обобщенная координата. Число обобщенных координат и, следовательно, входных звеньев, равно подвижности механизма относительно стойки –W3.
Подвижность плоского механизма определяется по структурной формуле Чебышева (1):
![]() (1)
(1)
где n- количество всех звеньев механизма;
P1, P2 - число одно и двухподвижных кинематических пар в механизме.
Из-за погрешностей при изготовлении механизмов возникают вредные пассивные связи q - (избыточные), которые приводят к дополнительным деформациям и потерям энергии на эти деформации. При конструировании они должны быть выявлены и устранены. Количество их выявляется по структурной формуле Сомова – Малышева (2):
![]() (2)
(2)
В механизме без избыточных связей q ≤ 0 Устранение их достигается изменением подвижности отдельных кинематических пар.
Присоединение структурных групп Ассура к ведущему звену является наиболее удобным методом построения схемы механизма. Группой Ассура называется кинематическая цепь, которая при соединении внешних пар к стойке получает нулевую степень подвижности. Простейшая группа Ассура образуется двумя звеньями, соединенными кинематической парой. Стойка в группу не входит. Группа имеет класс и порядок. Порядок определяется количеством элементов внешних кинематических пар, которыми группа присоединяется к схеме механизма. Класс определяется числом К, которое должно удовлетворять соотношению:
![]() (3)
(3)
где P- количество кинематических пар, включая элементы пар, Q1 количество звеньев в группе Ассура.
Класс и порядок данного механизма соответствует классу и порядку старшей группы Ассура в этом механизме. Цель классификации – выбор способа исследования механизма.
Среди всего многообразия конструкций механизмов различают: стержневые (рычажные), кулачковые, фрикционные, зубчатые механизмы, механизмы с гибкими звеньями (например, ременные передачи) и др. виды (рис. 1).
Менее распространенные классификации подразумевают наличие механизмов с низшими или высшими парами в плоском или пространственном исполнении и т.д.
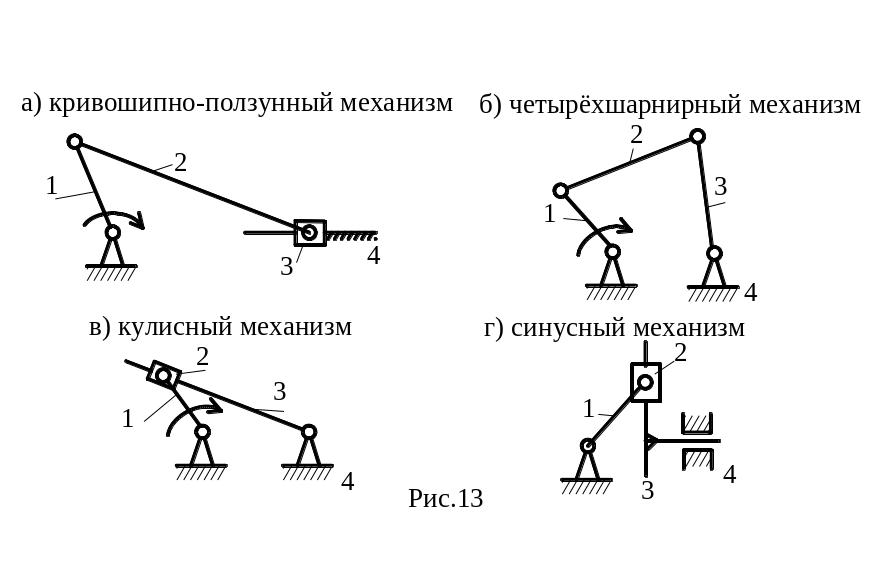
Рисунок 1- Виды механизмов
Учитывая возможность условного превращения практически любого механизма с высшими парами в рычажный, в дальнейшем наиболее подробно рассматривается именно эти механизмы.