

1. Autopilot – urządzenie które zastępuje czynności sternika poprzez układ automatycznego sterowania
Autopilot jest bezpośrednio sprzężony z układem sterowym (urządzenie wykonawcze). Wpływa on bezpośrednio na wychylenie płetwy sterowej.
Obecnie statki morskie są w zasadzie sterowane ręcznie tylko podczas przechodzenia przez kanały oraz cieśniny morskie o dużym natężeniu ruch oraz w razie ciężkiej sztormowej pogody.
Obsługa maszyny sterowej odbywa się z kolumny sterowej na mostku lub na skrzydłach mostka
Wymagane jest również posiadanie stanowiska sterowania awaryjnego które polega na ręcznej obsłudze siłowników odpowiedzialnych za wychylanie płetwy sterowej.
2. Korzyści płynące z faktu korzystania z autopilota:
- wzrost średniej prędkości statku
- oszczędność w eksploatacji statku
- skrócenie czasu rejsów
- zmniejszenie zużycia paliwa
3. Urządzenie sterowe składa się z trzech elementów:
a) telemanipulator – steruje pracą maszyny sterowej
b) maszyna sterowa – wyróżnimy 2 rodzaje ze względu na sposób przekładni:
- mechaniczna – urządzenia elektroniczno-mechaniczne
- hydrauliczne – urządzenia elektroniczno hydrauliczne
c) ster
4. Wymagania stawiane Autopilotom:
- utrzymywanie statku na określonym kursie
- optymalna praca przy zmianach kursu dokonywanych na pełnym morzu
(zmiana wychylenia wpływa na prędkość statku i zużycie paliwa) 5. Sterowność i zwrotność statku:
Stateczność:
- Statek stateczny kursowo – po odchyleniu się statku od kursu pierwotnego statek kontynuuje ruch po nowym kursie
- Statek niestateczny kursowo Roz odchylony od kursu z czasem zwiększa to odchylenie. Sterowanie takim statkiem jest bardzo uciążliwe.
Zwrotność:
- jednaki zwrotniejsze posiadają pogorszoną stateczność kursową
- statki mające lepszą stateczność są mniej zwrotne
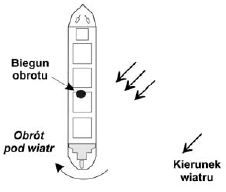
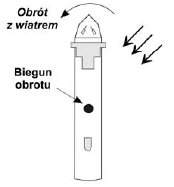
6. Zaburzenia o charakterze ciągłym:
- Statyczne działanie wiatru (są tak silne że czasami aby je równoważyć trzeba wychylić ster nawet o 10 stopni):
Statki zawietrzne – odchylają się od kursu z wiatrem
Statki nawietrzne – odchylają się od kursu pod wiatr
- Przechyły statku (rozmieszczenie paliwa, towaru, balastów)
 -
Działanie śruby (Płytkie akweny oraz nierówne dno)
-
Działanie śruby (Płytkie akweny oraz nierówne dno)
7. Zaburzenia doraźne:
- Oddziaływanie dynamiczne fali – fale uderzając o kadłub odchylają go od kursu
- Praca steru – wychylenia na lewą i prawą burtę w celu utrzymania statku na kursie również powodują odejście statku z nakreślonej trajektorii
8. Utrzymywanie statku na żądanym kursie:
- Statki handlowe ze względu na dużą stateczność kursową same wracają na kurs bez pomocy steru,
- Sternik uruchamia ster przy odchyleniu od kursu większym od jednego stopnia,
- Przy większym wychyleniu steru sternik wychyla statek o niewiele większy kąt i przytrzymuje go dłużej w zadanej pozycji,
- Doświadczony sternik przewiduje tendencję ruchu statku
9. Automatyczne sterowanie statkiem;
- Układ Otwarty – Układ w którym nie ma oddziaływania wielkości wyjściowej na wielkość wejściową. Układy otwarte nie SA w stanie równoważyć zmian wewnętrznych własności obiektów sterowania oraz z zasady nie mogą sterować obiektami niestabilnymi
- Układ Zamknięty – układ w którym istnieje sprzężenie zwrotne. Jednym z podstawowych układów automatyki jest układ z ujemnym sprzężeniem zwrotnym. Układ ten charakteryzuje się mniejszym wpływem zakłóceń działających na układ regulacji w porównaniu z układem otwartym.
10. Statek jako dynamiczny układ sterowania :
W celu uzyskania kontroli nad systemem (statkiem) należy zastosować układ regulacji który będzie określał wpływ sygnałów u(t) i y(t) (wejście i wyjście) i będzie wypracowywał odpowiednią decyzję:
Statek jako obiekt składa się z następujących bloków:
- blok sterowania – autopilot
- blok maszyny sterowej – człon wykonawczy
- blok sprzężenia zwrotnego - blok lokalnego sprzężenia zwrotnego – zwiększa stabilność całego układu.
Ogólna zasada działania układu:
Odchyłka kursowa = Kurs rzeczywisty – kurs zadany
a) Ma to na celu uwzględnienie wartości odchyłki kursowej i późniejszy powrót na zadany kurs.
b) Wewnętrzne sprzężenie zwrotne przekazuje sygnał wychylenia steru do regulatora i ogranicza tym samym ilość włączeń maszyny sterowej
c) Główne ujemne sprzężenie zwrotne jest realizowane przez człon miarowy którym jest żyrokompas-przekazuje do autopilota kurs rzeczywisty statku