

§ 44. Привязка пунктов к постоянным предметам местности и отыскание утерянных центров
Для облегчения отыскания пунктов геодезической сети при закладке каждого пункта выполняют глазомерную съемку окружающей территории и его привязку к постоянным местным предметам с помощью угловых и линейных измерений. Результаты привязки оформляют в специальных абрисах. Выбор того или иного способа привязки зависит
ПШ1 НРЕЛЫЕИЕ ИЖ11ЕШ РМГИИУЖ 1ИРИЫХ ВУН1ТВВ
от местных условий и наличия вблизи пункта постоянных местных предметов. Однако в любом случае число элементов привязки должно быть достаточным для быстрого нахождения как минимум двух соседних пунктов. Различают случаи привязки к близким и удаленным местным предметам.
а б в
Рис.
54. Схемы привязки
близкого пункта:
а — к фасаду здания;
б — к углу здания;
в — к оси дороги
Километровый
столб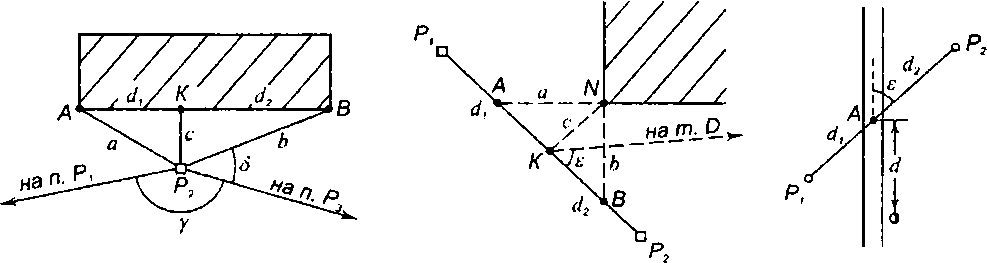
Если пункт Р2 расположен вблизи стены капитального здания (рис. 54, а), то его привязка может быть выполнена путем замеров расстояний от пункта Р2до углов здания АР2= а, ВР2= Ь и длины перпендикуляра КР2 = с; для определения положения точки К на стене здания следует измерить отрезки АК = и КВ = й2. Для восстановления направлений на смежные пункты Р, и Р2 достаточно измерить на пункте Р2 углы у и &
В случае, когда сторона полигонометрического хода проходит вблизи угла здания, привязку удобно выполнять способом промеров (рис. 54,6). По створам стен здания на стороне хода Р;Р2 отмечают точки Л и В; опустив перпендикуляр из точки N угла здания на сторону хода, получают точку К. Положение этих точек относительно угла здания определяется длинами линий АИ = а, ВЫ = Ь и КЫ = с. Для более точного восстановления направления стороны хода на одной из точек (например, точке К) следует измерить угол е между стороной хода и направлением на удаленный четко видимый ориентир.
При пересечении стороной хода дороги, ЛЭП и других линейных объектов (рис. 54, в) отмечают точку А пересечения оси объекта с линией хода. Затем измеряют угол е% длины АР1 — йр АР2= й2 и расстояние от точки А до ближайшего постоянного местного предмета (например, километрового столба, переезда и т.д.).
Если поблизости от пункта отсутствуют постоянные местные предметы, то привязку выполняют к удаленным ориентирам, которыми могут служить пункт триангуляции, одинокое дерево, острая вершина горы, шпиль здания и т. д.
В этом случае на пункте Р2 (рис. 55) измеряют углы между направлениями на выбранные ориентиры @2 (аналогично обратной геодезической засечке), а также углы уп 3 между сторонами хода и направлениями на ориентиры. Обычно результаты привязки пунктов приведенными способами позволяют достаточно легко найти на местности пункты геодезической сети.
ЦЗДЕ111. ГЕЦЕЗИКИЕ НИШ Ц ШИИ МИД
В В практике нередки случаи, когда
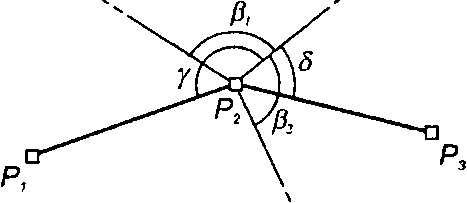
Рис.
55. Схема привязки
пункта к удаленным ориентирам
а
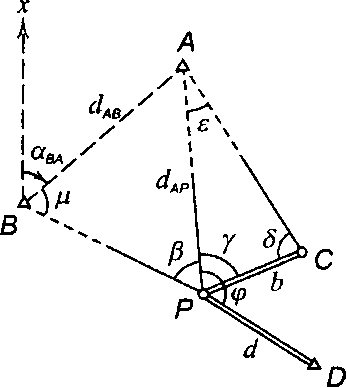
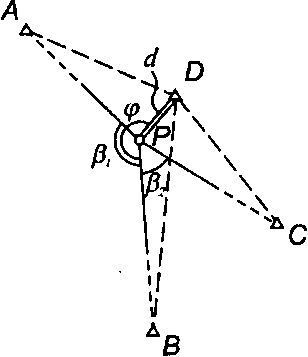
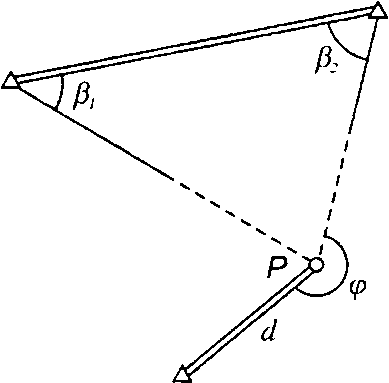
Рис. 56. Схемы отыскания утерянного центра: а — по трем исходным пунктам; б — по двум исходным пунктам (способ И.В. Матвеева)
Далее по координатам точек Р, О и В по формулам обратной геодезической задачи вычисляют расстояние с/, дирекционные углы аРЕ> и разбивочный угол <р:
арв% а затем
пш i. 8нрецеяев1е иш1еш ршшук рй6ряык вштв1
Хп Хр Хя Хр
а
рр
В точке Р устанавливают теодолит и откладывают от линии РВ угол <р ив полученном направлении по расстоянию д. находят точку в этой точке роют котлован и отыскивают утерянный центр пункта.
При наличии видимости на два исходных пункта отыскание утерянного центра можно выполнить способом И.В. Матвеева (рис. 56, б). На участке возможного местоположения утерянного центра О измеряют базис РС = Ь и углы Д у и 8 при точках Р и С.
По известным координатам пунктов А и В решением обратной геодезической задачи вычисляют расстояние й^ и дирекционный угол аАв. Затем находят координаты точки Р, выполнив вычисления в следующей последовательности (см. рис. 56, б).
е = 180°-{у + 3);
^ • Л РА а
алр = Ь ; //= агсзт-г1-'зт р;
хр
=
в
*Л + <*ЛР 'со*аАР> Ур=Ул+ <*АР • «П <2>
Далее по координатам точек Р и Д решая обратную геодезическую задачу, находят длину РО = ё и дирекционный угол аро. Рассчитав угол <р = арв — арА и отложив его от линии РА, по направлению РВ откладывают длину й и отыскивают утерянный центр.
При небольших расстояниях до исходных пунктов положение вспомогательной точки Р можно определить решением прямой геодезической засечки с пунктов А и В, предварительно выполнив на них измерение углов Р2 (рис. 57).
Если с точки Р отсутствует видимость на сохранившиеся исходные пункты, то отыскание утерянного центра может быть выполнено путем проложения висячего теодолитного хода от ближайшего исходного пункта до точки Р (рис. 58, а).
Если вблизи искомого пункта расположены два пункта геодезической сети, между которыми нет прямой видимости, то положение вспомогательной точки Р можно определить проложением О между этими пунктами хода «без при- Рис. 57. Схема отыскания мычных углов» (рис. 58, б), т. е. хода с утерянного центра прямой координатной привязкой. засечкой
а
Рис.
58. Схемы отыскания
утерянного центра: а
— проложением висячего
теодолитного хода; б — проложением
хода «без примычных углов»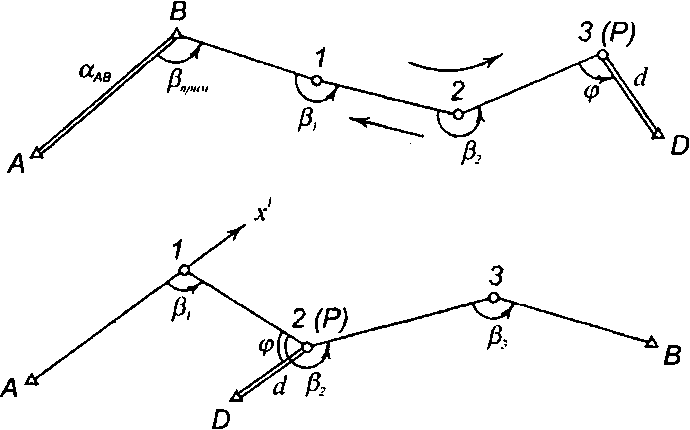
Расчет координат точек хода выполняют в следующем порядке (рис. 58, б).
Вычисляют дирекционный угол и расстояние между исходными пунктами А и В:
Вводят условную систему координат с началом в точке А, направив ось абсцисс по стороне А-1. Тогда условные координаты пункта будут х'А = 0, у'А= 0, а дирекционный угол стороны А-1 аА_{ = 0°.
Вычисляют координаты всех точек хода, включая исходный пункт В, в условной системе.
По условным координатам пункта В (х'в, у'в) вычисляют условный дирекционный угол линии АВ и для контроля — расстояние АВ:
Определяют дирекционный угол первой стороны в истинной системе координат как
<*А-1 = аАЯ "
Вычисляют координаты точек хода в истинной системе координат.
Дальнейшие действия по отысканию утерянного центра проводят по аналогии с рассмотренными выше случаями.
РЩЕЯ
ii.
ПЕЦЕЗИЕСШ
ршш п
1ШШИ
шшп