

§ 40. Лучевой метод
Лучевой метод определения дополнительных опорных пунктов, разработанный проф. Ю.Г. Батраковым [1], основан на использовании свето- и радиодальномеров для измерения расстояний до определяемых точек. Он применяется для обслуживания строительства мелиоративных и других объектов сельско-хозяйственного назначения и может использоваться для развития съемочного обоснования крупномасштабных топографических съемок. Лучевые системы опорных пунктов удобно создавать в открытой холмистой местности, когда с пунктов опорной геодезической сети, расположенных на вершинах холмов, имеется хорошая видимость по многим направлениям.
Сущность метода заключается в определении положения точек способом биполярных координат с двух пунктов: основного (исходного) пункта А и дополнительного А', Рис. 50. Схема определения выбираемого рядом с основным на отстоя- дополнительных пунктов нии 5-20 м (рис. 50). Координаты дополни- лучевым методом тельного пункта А' получают путем передачи
пищ 1нрещеиеишеш ц11имшшыж №ПШ вунш1
их с основного пункта полярным способом, измерив угол между выбранным исходным направлением на пункт В и направлением на дополнительный пункт и расстояние до него.
Для определения планового положения точек на местности (напр., точки Р;) с основного и дополнительного пунктов А и А' наблюдают направления точным теодолитом типа Т2 и измеряют расстояния и д.\ свето- или радиодальномерами. Таким образом, координаты каждой точки определяют дважды (относительно пунктов А и А'), Контролем измерений служит сходимость значений пар соответствующих координат.
Среднюю квадратическую погрешность положения искомого пункта Р{ относительно исходною из одного определения рассчитывают по формуле
![]()
(175)
где с? — расстояние до определяемой точки; т^ — средняя квадратическая погрешность измерения утла, а средняя квадратическая погреш-
![]()
ность среднего из двух значений М =
§ 41. Снесение координат с вершины знака на землю
Данная задача возникает в случаях, когда необходимо привязать по- лигонометрический (теодолитный) ход к пункту существующей опорной сети, на котором нельзя встать с теодолитом (шпиль здания, заводская труба, телевышка, колокольня и другие ориентиры).
Пусть требуется привязать пункт Р к пункту А геодезической сети, расположенному на шпиле здания. Вблизи пункта А (на отстоянии 100 — 200 м) выбирают точку Р с расчетом, чтобы с нее были видны пункт Л, два удаленных исходных пункта В и С и точка полигонометрического или теодолитного хода (рис. 51). Из точки Р разбивают два базиса для определения недоступного расстояния АР.
Для решения задачи измеряют базисы ЬиЬ'и шесть углов: (32, р\, Р2Х 8 и 8. Точность измерения углов и базисов должна соответствовать
В
С
Р
Рис.
51.
Схема снесения координат с вершины
знака на точку хода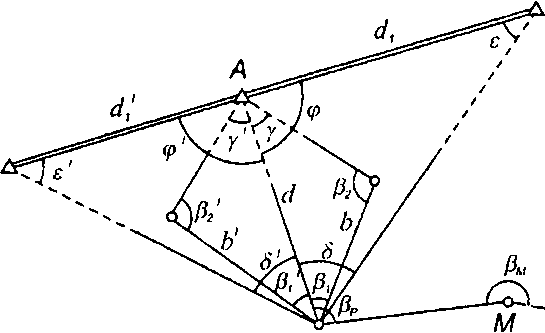
мзце111. гндезиесне нить! ц илии 1ешп
точности теодолитного (полигонометрического) хода. Второй базис Ъ' и углы при нем используют для контроля определения расстояния АР = й. Кроме того, в точке Р измеряют примычный угол (5р для привязки теодолитного хода Р-М-И-... .
Задача решается в следующей последовательности.
1. По известным координатам пунктов А и В решением обратной геодезической задачи определяют дирекционный угол стороны АВ и ее длину
алв ~ ——; 4Х —= ^—= ^Дд-2 + Ау2.
хВ~хА со$аАВ *
Аналогичным образом по координатам пунктов А и С вычисляют
аАВ И <*\-
Решением вспомогательных треугольников с базисами по теореме синусов дважды вычисляют недоступное расстояние АР =
А.
81П у 81П у
где г = 180°- (Р,+/32); /= 180°-(/?,+/?2).
Расхождение в значениях недоступного расстояния (д!— допускается в пределах точности измерения длин линий в теодолитном ходе. За окончательное значение расстояния АР принимают среднее арифметическое
. 4'+ 4'
Вычисляют дирекционный угол стороны АР. Для этого из треугольника АВР на основе теоремы синусов находят углы е и е!\
. 4 . с / .4 . е = агсзт—згпо; е = агсзгп—зто .
Вычисляют вспомогательные углы <р и <р':
= 180е — + ^' = 180°+
По дирекционным углам исходных сторон АВ и АС и вспомогательным углам <р и <р' дважды определяют дирекционный угол аАВ:
а'лр^Ялв+К а"лр=алс-р'- Расхождение в значениях дирекционного угла \^'ЛР-сс''АР\ не должно
превышать 2т^, т. е. двойной точности измерения углов в ходе. За окончательное принимается среднее значение
^ _ я'лр+*АР АР — 2
По длине стороны АР = с? и дирекционному углу аАР вычисляют приращения координат и координаты точки Р:
хР=хл+4 со$аАР;
АР'
[|щ I. ттж пимам иш-тнымх пит шин
Контроль измерений и вычислений может выполняться одним из следующих способов:
из треугольника АВР вычисляют дирекционный угол стороны ВР аВР и ее длину двр и повторно рассчитывают координаты точки Р относительно пункта В;
по координатам точки Р и пункта В (или С) решением обратной геодезической задачи определяют дирекционный угол авр (или аРС) и вычисляют угол 8 (<?') как разность дирекционных углов сторон РВ(РС)
и РА. Допустимое расхождение АЗ-\Звыч-Зизм\<2т^.
Средняя квадратическая погрешность определения положения точки Р может быть определена по формуле
л йгсоз^л | / тй
(176)
где Шр — средняя квадратическая погрешность измерения углов; та — абсолютная погрешность определения недоступного расстояния, вычисляемая из выражения
(177)
Пример решения задачи снесения координат с вершины знака на
пункт полигонометрического хода 1-го разряда =5", : 10 000^ г
выполненного с помощью микрокалькулятора, приведен в табл. 17.
Таблица 17
Снесение координат с вершины на пункт полигонометрического
Схема
зхпу
Рабочие формулы ™Р2 зтр2*
51Пу
згпаАВ созаАВ • * - х
€ = огс8хп 81п о /
(р = 180° - (6+е); а"АР = аАС~<р;
а ар = алв+<р: хР = хА+с! созаЛР; уР = ул+(15таАР.
*8<*лв
=
Ув-Ул
.
а _Ув~Уа
_хв~ха
. ~
«/ - . -
X
а X
л
*с
*а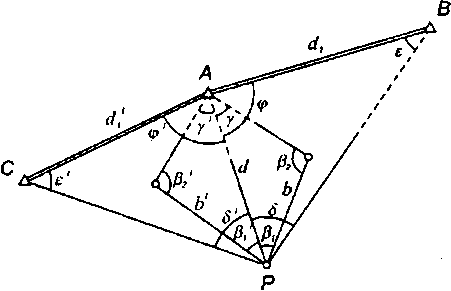
ИЗЦЕ1 II. ЕЦЕЗИЕСШ Ш М ШИПИ ШШ1