

§ 36. Обратная геодезическая засечка (задача Потенота)
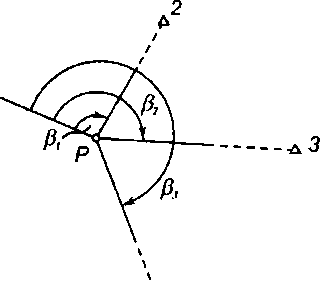
Обратная геодезическая засечка заключается в определении координат дополнительной точки Р (рис. 44, а) путем измерения на этой точке углов /?2 между направлениями как минимум на три исходных пункта с известными координатами.
Полное решение этой задачи было разработано французским математиком Лорано Потенотом, поэтому определение координат точки методом обратной засечки часто называют задачей Потенота.
При решении обратной засечки исходные пункты следует нумеровать (рис. 44, а) по часовой стрелке, считая от наблюдателя (точки Р).
В
(2)
А(1)
С(3)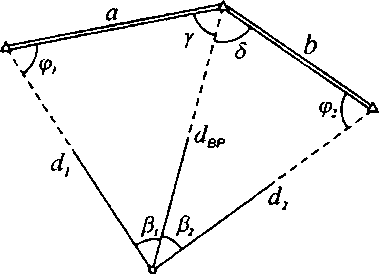
Рис. 44. Обратная геодезическая засечка: а — по трем пунктам; б — по четырем пунктам
Пусть даны координаты исходных пунктов 1 (х}, ух), 2(х% у2) и З(х3, у3); на определяемом пункте Р измерены горизонтальные углы /Зг (рис. 44, б). Требуется определить координаты пункта Р (хр ур).
Задача решается в следующей последовательности. 1. По известным координатам пунктов 1, 2 и 3 находят дирекцион- ные углы сторон и их горизонтальные длины:
Уо — У]
I..
Х*у х.
5111^.2 СО$аи2'
2. Вычисляют значение угла 1-2-3:
/.1-2-3 = у + 3 = а2А - аъъ.
зш^з с08<2%_3*
рдзде1ii. геце311еше ш1ты ц идиш тйншщ
3. Определяют горизонтальные углы <р} и <р2 при исходных пунктах 1 и 3, для чего:
а) находят сумму углов <р1 и <р2 как
б) определяют разность углов и <р2. Для этого из треугольников 1-2-Р и 2'3'Р составляют соотношения:
а ~~ 81П Д ' Ь 8Ш '
Отсюда можно записать
6 51П _ 81П^
азт/?2 ~ 8т^2 ' (149)
В дальнейшем это выражение служит контролем вычисления углов <Р, и <Рт
Для удобства дальнейших преобразований в выражение (149) вводят обозначение
где 0 — вспомогательный угол.
К полученному выражению сначала прибавляют, а затем вычитают единицу:
31П ~~ 1%0 ' 8Ш '
51П^ ^ _ 1 8111^ —31П^2 _ 1 —
81П " 1%0 ' 8Ш
Разделив первое соотношение на второе, получают
8т^ -I- 8111^2 _ 1 +
Преобразовав левую часть равенства по формулам половинных углов, получают
2зт У^П+ъУсоз1/^-?;) ^ <245° + 120 2 соз зт1/2(р1 - р2) }—1%45° •
Поскольку
то формулу (156) можно представить в виде
Ч У2(Г, -Л) = « ^(л(152)
яш i. ивдвене ишни цниипаиш виорнык пттвв
Подставив в формулу (152) значения суммы углов + и Угла найденного из выражения (150), определяют полуразность
в) зная полусумму и полуразность, находят значения углов <р} и <р2\
Я—2-+ > ^ 2 2 •
Контроль правильности вычисления углов <р1 и ср2 производят по формуле (149).
Из треугольников 1-2-Р и 2-3-Р определяют углы у и 5\
д = 180° —
Контроль: у + д = 1 -2-3.
Находят дирекционные утлы аир и и горизонтальные длины сторон (1р й2 и
а\ -р = а\л + л; ^з-р = ~ ^
_ Д81П/ - _ &8Н1 д , _ _
^ ~ 81пД 1 " 81П 5 ^ " 8Ш Д " 8ш/2 '
Вычисляют приращения координат точки Р: относительно точки 1
А= с! 1 соз аир; Ауир = зт а 1Р.
Определяют координаты искомой точки Р дважды: относительно точки 1
хр = х} + Ддс,_р; = у, + Дд^;
относительно точки 3
хр = х3 + Ах3_р; уР=у3 + А Ум .
Двойные значения найденных координат точки Р дают контроль вычислений.
Погрешность определения положения искомой точки в значительной степени зависит от ее расположения относительно исходных пунктов. Наилучшие результаты получают в случаях, когда определяемая точка находится внутри треугольника, образованного исходными пунктами, либо вне его напротив одной из вершин треугольника. Если определяемая точка лежит на окружности, проходящей через три исходных пункта («опасный крут»), то задача становится неопределенной (рис. 45).
Как следует из рис. 45, суммы вписанных в окружность углов
Тогда = =