

Исследование цифровой системы импульсно-фазового управления тиристорным мостом (автор: доц., к.т.н. Соседка Вилий Лукич)
Лабораторная работа № 3_15
Исследование цифровой системы импульсно-фазового управления трехфазным однополупериоднымо мостовым выпрямителем
1. Цель работы:
- изучение работы цифровой системы импульсно-фазового управления (СИФУ) трехфазного однополупериодного мостового выпрямит;
- получение навыков создания виртуальных устройств в пакете Power System Blockset (PSB);
- получение навыков наладки и расчёта цифровых блоков систем управления силовыми выпрямительными устройствами.
2. Постановка задачи
Цифровая СИФУ, в
которой преобразование сигналов
осуществляется в цифровой форме,
выполняется по алгоритму аналоговой
СИФУ. На вход цифровой СИФУ в цифровых
системах регулирования подается код,
а
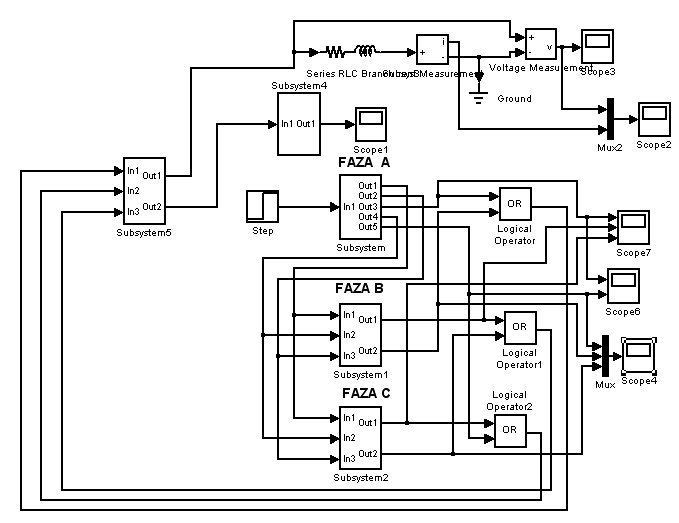
Рис.1. Виртуальная модель управления однофазным мостовым выпрямителем цифровым СИФУ (zms_03_v_01rl.mdl)
преобразование сигналов, выполняемых в аналоговой СИФУ, в цифровой СИФУ заменено соответствующим преобразовапнием кодов. Укрупненная функциональная схема трехфазного однополупериодного цифрового СИФУ, представленная на рис.1, состоит из пяти подсистем. Подситемы 1-3 (Subsystem-Subsystem 2) формируют импульсы для управления тиристорами моста. Подситемы 4 (Subsystem 4) формирует стробирующий импульс в момент перехода фазного напряжения фазы А через нуль. Этот импульс будет использован в микропроцессорной системе как стробирующий (синхронизирующий), по которому, во-первых, запускается блок управления, а, во-вторых, формируются программным путем стробирующие импульсы каждой фазы. В аналоговых системах в блок управления поступают 3 фазы, по которым формируются 3 синхронизирующих импульса. Подсистема 5 (Subsystem 5) маскирует трёхфазную однолполупериодную нулевую схему силового тиристорного выпрямителя.
Подсистема фазы А формирует импульсы для управления тиристорами (входы out3 и out5) и импульсы, синхронизирующие и формирующие задания для других фаз (входы Out2 и Out3). Подсистема фаз В и С формируют импульсы только для управления тиристорами ( входы out1 и out2).
Прежде чем приступить к описанию работы отдельных подсистем цифровой СИФУ, рассмотрим более подробно процессы в силовом выпрямителе при работе на активно-индуктивную нагрузку. Известно, что максимальный угол управления тиристорами α, при работе на активно-индуктивную нагрузку, лежит в диапазоне 0°-180° (практически 0°-160°). Режим работы выпрямителя, когда ток нагрузки протекает навстречу выпрямленному напряжению под действием ЭДС, называется инверторным. Причем, величина угла, отделяющего выпрямительный режим от инверторного, зависит от параметров цепи (соотношения сопротивлений R и L) и скорости, с которой изменяется задание на выходное напряжения тиристорного преобразователя. Если тиристорный преобразователь питает ДПТ, то переход от выпрямительного режима к инверторному определяется еще более сложно, так как к вышеперечисленным факторам добавляется и протиЭДС двигателя.
Таким образом, в виртуальной модели инверторный режим осуществляется следующим образом: задается малый угол управления на некоторый интервал времени, в течение которого в нагрузку поступает электромагнитная энергия, а затем угол управления резко увеличивается (в пределах допустимого), что приводит к уменьшению выпрямленного напряжения. Это создает условия для инверторного режима: ток через тиристоры будет протекать под действием ЭДС нагрузки.
При работе на активную нагрузку угол α изменяется в более узких пределах 0°-120°. При α=120° напряжение и ток на выходе выпрямителя равны 0. Эти соотношения устанавливают связь между напряжением управления и положением управляющего импульса тиристора, т.е при Uвх = 0, α = 120°, а если Uвх =10 В, то α = 0°. Если выпрямитель работает на активно-индуктивную нагрузку (при L>>R), то среднее значение выпрямленного напряжения равно 0 при α = 90°. Учитывая максимальное значение угла управления (с учетом инверторного режима α = 160°), определяем предельное значение напряжения задания
![]()
Если выпрямитель работает на двигатель, то желательно установить такое соотношение между напряжением управления Uвх и положением управляющих импульсов тиристоров, при которых двигатель находится в состоянии трогания. Естественно, при разных моментах нагрузки соотношения между Uвх и состоянии трогания, а, следовательно, и напряжением на двигателе, будут разные. Поэтому при работе управляемого выпрямителя на ДПТ вводится начальный угол α= αнач, при котором двигатель находится в состоянии трогания. Для определения α= αнач выставляется угол α=120°, а затем этот угол начинают медленно уменьшать и определяют момент начала вращения. Затем угол α несколько увеличивают, добиваясь остановки двигателя, и считают, что α= αнач. Угол α= αнач зависит от момента сопротивления и индуктивных параметров цепи.
Функциональная схема (рис.1) имеет блок задания (Step), позволяющий задавать напряжение выпрямителя. При работе выпрямителя на активную нагрузку напряжение блока задания изменяется от нуля до 10В., а при работе выпрямителя на активно-индуктивную нагрузку - от нуля до 13,33В., что позволяет работать выпрямителю в выпрямительном и инверторном режимах.
Подчеркнём, что описанная ниже схема цифрового СИФУ будет использована при программной реализации (МК PIC18F452). При переходе фазы А через 0 в системе формируется первый синхронизирующий импульс (SubSystem4). При выполнении равенств
![]()
(где
![]() –
фазные напряжения) в МК программным
путём формируются стробирующие импульсы,
по которым запускаются программы
определения углов α для тиристоров
каждой фазы (угол α отсчитывается от
точки естественной коммутации и для
данной схемы изменяется в пределах
0°-160°). Изменение α от 0 до αнач
соответствует выпрямительному режиму,
а от αнач
до 160° - инверторному режиму.
–
фазные напряжения) в МК программным
путём формируются стробирующие импульсы,
по которым запускаются программы
определения углов α для тиристоров
каждой фазы (угол α отсчитывается от
точки естественной коммутации и для
данной схемы изменяется в пределах
0°-160°). Изменение α от 0 до αнач
соответствует выпрямительному режиму,
а от αнач
до 160° - инверторному режиму.
Следует указать, что в аналоговой системы переход от выпрямительного режима к инверторному режиму происходит без изменения последовательности включения тиристоров, т.е. тиристор, работающий в выпрямительном режиме, автоматически переводится в инверторный режим. В цифровой системе (рис.1) для выпрямительного и инверторного режимоволв используются два тиристора. Это вызвано особенностями алгоритма, позволяющего сократить число счетчиков.
Рассмотрим это положение более подробно. В трёхфазной однополупериодной схеме синхронизирующие импульсы, включающие таймеры, подаются через 120°. Как было указано выше, диапазоны изменения углов управления тиристорами составляет 0-160°. Поэтому импульсы, управляющие, например, фазой А, могут появиться в диапазоне t1-t3 (рис.2). Но в момент t2 появится стробирующий импульс, определяющий угол управления тиристора фазы В. Таким образом, на интервале t2-t3 необходимо задействовать два таймера: один для управления тиристором фазы А, а второй – фазы В. От второго таймера можно отказаться, приняв следующий алгоритм: если импульс появляется в диапазоне 0- αнач., то управляется тиристор, соответствующий данной фазе, а если импульс управления появляется в диапазоне αнач-160°, то управляется тиристор предшествующей фазы. Такой алгоритм уменьшает число, вносимое в таймер, что позволяет сократить их количество.
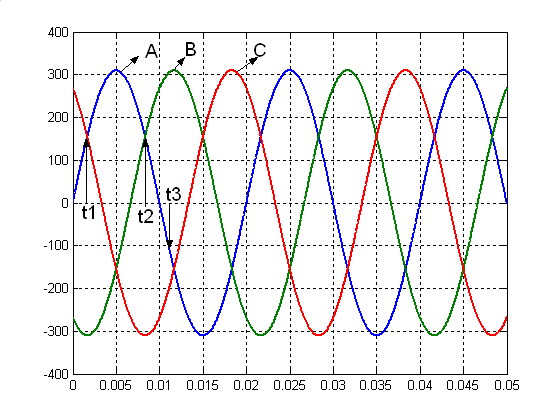
Рис.2 Фазные напряжения трёхфазного однополупериодного выпрямителя.
Таким образом, алгоритм управления цифровой СИФУ последовательно включает следующие операции:
1. При положительном значении напряжения фазы А в МК поступает стробирующий импульс, по которому при известной частоте сети, определяются интервалы t1,t2,t3, соответствующие выполнению равенств
t1 = 1/12fc ( 30° градусов от точки стробирования)
t2 = 5/12fc ( 150° градусов от точки стробирования)
t3 = 9/12fc ( 270° градусов от точки стробирования)
где fc – частота питающей сети.
2. В момент t1 на вход цифрового СИФУ подаётся код, соответствующий требуемому углу управления тиристорами.
3. По определённому ранее коду α= αнач и по стробу, соответствующему t1, t2 или t3, определяется управляемый в этот момент тиристор.
4. Если подаваемый на вход цифрового СИФУ код лежит в пределах 0- αнач, то управляется тиристор соответствующий текущему стробу, привязанному ко времени (для t1- тиристор фазы А, для t2 –фазы B, для t3- фазы C).
5. Если подаваемый на вход СИФУ код соответствует инверторному режиму, то, во-первых, управляющий импульс подаётся на тиристоры, которые предшествовали текущему интервалу времени (для t1 – управляется тиристор фазы C, t2 -фазы A, t3 –фазы B), а во-вторых, в таймер вносится код αI, определяемой разностью
![]()
где
![]() – код задания на текущее значение
напряжения,
– код задания на текущее значение
напряжения,
![]() –код задания соответствующий начальному
значению угла.
–код задания соответствующий начальному
значению угла.
Функциональная схема цифрового СИФУ, реализующая вышеприведенный алгоритм, представлена тремя подсистемами (Subsystem – фаза А, Subsystem 1 – фаза В, Subsystem2 – фаза С). Cтруктурная схема Subsystem представлена на рис.3. В этой системе принято, что одному кванту счетчика соответствует перемещение управляющего импульса на один градус. Настройки блока Pulse Generator2, обеспечивающие заданные параметры, представлены на рис.4. Параметром Pulse Width корректируется ширина импульса, а параметром Phase delay -время появления импулься в пределах периода.
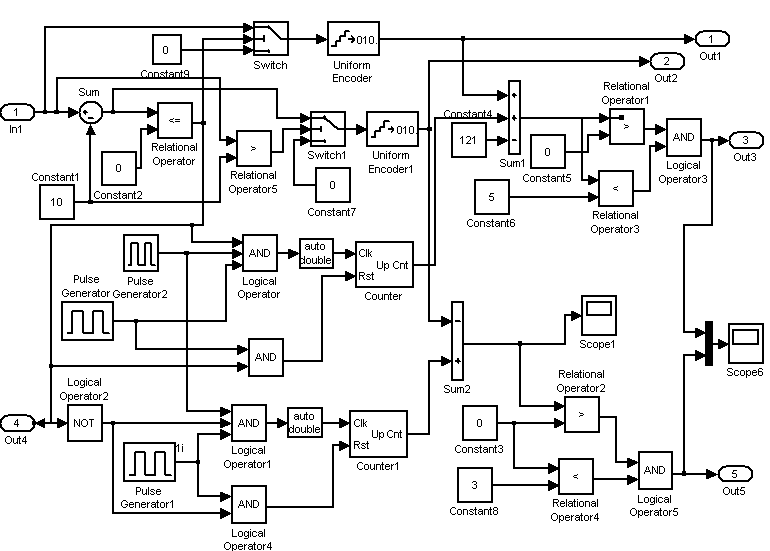
Рис.3 Структурная схема формирования управляющих импульсов цифровой системы.
Счетчик
фазы А запускается при
![]() на время, соответствующее 120°. В цифровой
системе эти параметры определяются
микропроцессорной пограммой, а в
структурной схеме (рис.3) они заданы в
настройках блока Pulse Generator
на время, соответствующее 120°. В цифровой
системе эти параметры определяются
микропроцессорной пограммой, а в
структурной схеме (рис.3) они заданы в
настройках блока Pulse Generator
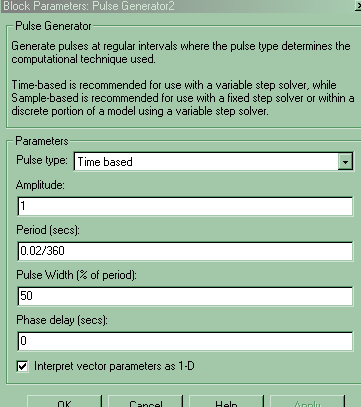
Рис.4.Настройки блока Pulse Generator2
(рис.5). Из параметров настройки следует, что через 1/600с., что соответствеет задержки включения счетчика на 30°, на выходе блока Pulse Generator появиться
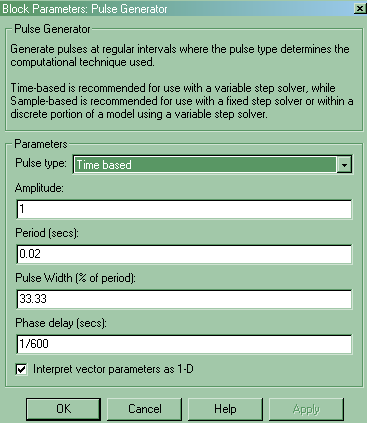
Рис.5. Настройки блока Pulse Generator
разрешаюший сигнал, длительностью 33,33% от периода, что соответствует включению счетчика на 120°.
Выход счётчика (Counter), определяющий выпрямительный режим фазы А, подаётся на один из входов сумматора (Sum1), на второй вход которого подаётся код задания с выхода блока Uniform Encoder, а на третий вход от блока Constant 4 подаётся смещение (120°-121°), величина которого определяет положение управляющего импульса при нулевом напряжениизадания.
Блок Uniform Encoder (рис.6) преобразует аналоговый сигнал, который может задаваться как с учетом знака, так и без учета знака, в код. Если аналоговый сигнал изменяется с учетом знака, то выходной код должен иметь знаковый
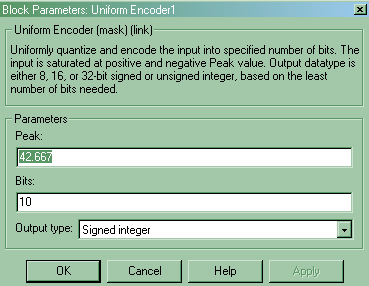
Рис.6.Настройки блока Uniform Encoder
разряд, а если
аналоговый сигнал изменяется без учета
знака, то выходной код не имеет знакового
разряда. Форма представления кода
задается в меню окна Output
type (тип выходных данных).
Если выбрать в окне Output
type меню Signed
integer (целое число со
знаком), то код будет иметь знаковый
разряд, а при выборе Unsigned
integer (целое число без учета
знака) в коде знаковый разряд будет
отсутствовать и все коды пойдут на
представление аналогового сигнала.
Параметры настроек блока Uniform
Encoder в соответствии с
принятыми условиями представлены на
рис.6. При максимальном изменении
аналогового сигнала, составляющим
![]() ,
и при учете, что этому напряжению
соотвествует перемещение управляющего
импульса на
,
и при учете, что этому напряжению
соотвествует перемещение управляющего
импульса на
![]() =120°,
и при учете, что на представление
аналогового сигнала, с учетом знака,
отведен n бит (n=10),
получаем
=120°,
и при учете, что на представление
аналогового сигнала, с учетом знака,
отведен n бит (n=10),
получаем
 .
.
Функции цифровых интеграторов выполняют блоки Counter (рис.7), используемые параметры настроек которых приведены ниже:
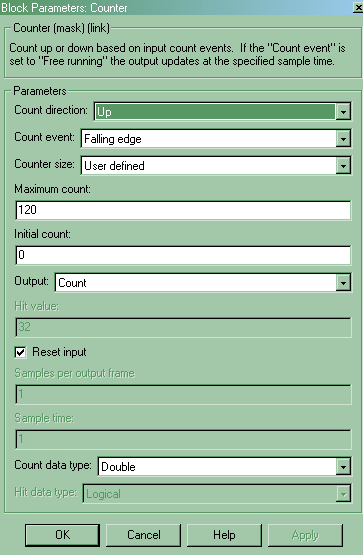
Рис.7.Настройки параметров блока Counter.
Ннаправление счета (Count Direction) – направление изменения показаний счетчика:
Down – в сторону убывания;
Up - в сторону возрастания;
Count Event (подсчитываемые события) - частота импульсов, влияющих на значение счетчика. Причем, емкость счетчика может изменяться при подъеме (Rising edge), при спаде (Falling edge), или при любом (Either edge) изменении входного сигнала.
Counter Size (размер счетчика) – диапазон, в котором могут изменяться показания счетчика. При выборе User Defined (определено пользователем) становится доступным после Maximum Count (максимальное значение счета), в котором задается максимально возможное значение счетчика. В этом случае показания счетчика изменяются от 0 до установленного значения, а затем счетчик обнуляется и процесс счета (интегрирования) повторяется. Так как импульс, изменяющий емкость счетчика, может фиксироваться по переднему или заднему фронту и может появляться в течение периода в любой момент, то время формирования последующей пилы, основанное на обнулении счетчика при его заполнении, будет задаваться с некоторой погрешностью. Действительно, трудно согласовать два события: окончание периода следования импульсов и изменение емкости счетчика.
Схема формирования
пилы будет работать более стабильно
при использовании настройкой Reset
Input (вход сброса). При
установке этого флажка используется
дополнительный порт Rst.
При подаче единичного скачка на этот
порт, счетчик устанавливается в исходное
состояние. Это позволяет использовать
синхронизирующие импульсы для управления
счетчиками. Учитывая, что угол управления
тиристором равен
![]() ,
а дискретность задачи угла составляет
,
а дискретность задачи угла составляет
![]() ,
то заносим в поле Maximum
Count число 120° и выбираем
Up (счет в сторону
возрастания).
,
то заносим в поле Maximum
Count число 120° и выбираем
Up (счет в сторону
возрастания).
Аналогом текущего времени в цифровом интеграторе является частота импульсов, формируемая генератором (Pulse Generator). Так как за пол периода (0,01с) на вход счетчика должно поступить 180 импульсов, то период формируемой последовательности задается соотношением:
![]() .
.
Используя
структурную схему (рис.1) и настройки
цифровых блоков, рассмотрим
работу цифровой СИФУ трехфазного
однополупериодного управляемог
выпрямителя. Подсистема
(Subsystem)
формирует управляющие импульсы фазы А
выпрямительного режима
и фазы С - инверторного режима. Задание
на величину угла управления поступает
по входу In1.
В блоке Constant1
выставлено напряжение, соответствующее
граничному режиму. При работе выпрямителя
на активно-индктивную нагрузку и при
![]() подсистема
(Subsystem)
управляют выпрямительным режимом, а
при
подсистема
(Subsystem)
управляют выпрямительным режимом, а
при
![]() -инверторным
режимом. Угол управления тиристором в
выпрямительном режиме определяется
счетчиком (Counter),
сумматором (Sum1)
и логически блоком (Logical
Operator3),
формирующим сигнал по выходу (Out3).
Если входное
напряжение задания
(вход In1)
меньше напряжения
блока Constant1,
то на выходе
сумматора Sum
появляется отрицательный сигнал, а на
выходе блока Relational
Operator
появляется логическая
единица,
подготавливающая
условия для запуска
счётчика
(Counter).
Принцип, заложенный в функционирование
цифровой СИФУ,
аналогичен принципу работы аналогового
СИФУ.
Поэтому, кроме выбора режима работы
выпрямителя (блока
Relational
Operator),
необходимо задать время и длительность
открытого состояния счетика. Эти парметры
задает блок Pulse Generator, определяющий время
запуска и длительность, в течение
которого импульсы поступают на вход
счетчика (интегратора).
-инверторным
режимом. Угол управления тиристором в
выпрямительном режиме определяется
счетчиком (Counter),
сумматором (Sum1)
и логически блоком (Logical
Operator3),
формирующим сигнал по выходу (Out3).
Если входное
напряжение задания
(вход In1)
меньше напряжения
блока Constant1,
то на выходе
сумматора Sum
появляется отрицательный сигнал, а на
выходе блока Relational
Operator
появляется логическая
единица,
подготавливающая
условия для запуска
счётчика
(Counter).
Принцип, заложенный в функционирование
цифровой СИФУ,
аналогичен принципу работы аналогового
СИФУ.
Поэтому, кроме выбора режима работы
выпрямителя (блока
Relational
Operator),
необходимо задать время и длительность
открытого состояния счетика. Эти парметры
задает блок Pulse Generator, определяющий время
запуска и длительность, в течение
которого импульсы поступают на вход
счетчика (интегратора).
Выпрямительный режим (управляется тиристор фазы А по выходу Out3) работает следующим образом:
в сумматор Sum1 заносится код, соответствующий напряжению задания;
в сумматор Sum1 заносится текущий код, соответствующий содержимому счетчика (Counter).
В сумматоре Sum1 алгебраически суммируются три кода. При положительном значении суммы на выходе логического оператора (Logical Operator3) появляется сигнал, включающий тиристор. Длительность этого сигнала (длительность управляющего импульса) определяется константой, занесенной в блок (Constant6).
Выходной сигнал инверторного режима определяется счетчиком (Counter1), сумматором (Sum2) и логически блоком (Logical Operator5), формирующим сигнал по выходу(Out5). Если входное напряжение задания (вход In1) больше напряжения блока Constant1, то на выходе сумматора Sum появляется положительный сигнал, по которому на выходе блока Relational Operator появляется логический нуль, а на выходе блока Relational Operator5-логическая единица, подготавливающая условия для запуска счётчика (Counter1), формирующего управляющие импульсы фазы С.
Принципы формирования управляющих импульсов фазы С такие же как и фазы А. Отличие состоит в настойках блоков. В блок Pulse Generator1 вносятся параметры, определяющие время включения и максимальную длительность инверторного режима фазы С. С учетом принятого алгоритма, параметры настроек Pulse Generator1 совпадают, кроме параметра Pulse Width (ширина импульса), с параметрами настроек Pulse Generator. Ширина импульса определяется углом α
![]()
где,
![]() -
принятый диапазон регулирования
тиристора в градусах.
-
принятый диапазон регулирования
тиристора в градусах.
Учитывая, что принятый диапазон регулирования тиристора равен 160°, получаем, что ширина импульса составляет 11%.
Таким образом, в инверторном режиме (управляется тиристор фазы С по выходу Out5), выполняются следующие операции:
в сумматор Sum2 заносится код, соответствующий разности между напряжением задания и напряжением, определяющим граничный режим;
в сумматор Sum2 заносится текущий код, соответствующий содержимому счетчика (Counter1).
А
В
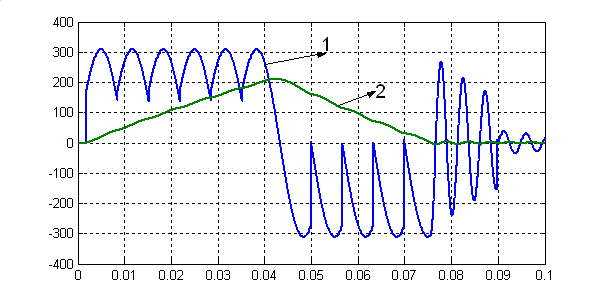
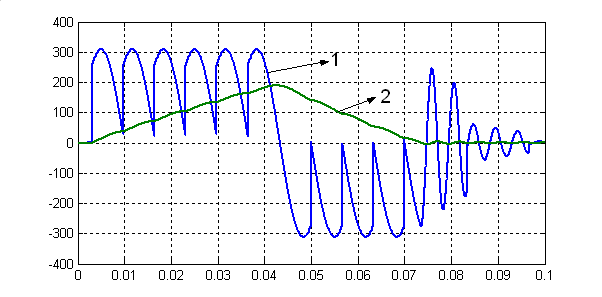
Рис.8. Осциллограммы напряжения (кривая 1) и тока (кривая2) на нагрузке однополупериодного мостового управляемого выпрямителя
В сумматоре Sum2 алгебраически суммируются два кода. При положительном значении суммы на выходе логического оператора (Logical Operator5) появляется сигнал, включающий тиристор. Длительность этого сигнала (длительность управляющего импульса) определяется константой, занесенной в блок (Constant8).
Отметим, что принцииальные схемы, формирующие управляющие импульсы тиристоров всех фаз, совпадают. Их отличия состоят только в настройках генераторов ворот, вклющих счетчики. В МП системах и это отличие будет отсуствовать, так как стробирующие импульсы, управляющие режимами счетчиков, формируются программным путем.
Результаты
испытания виртуальной модели
однополупериодного трехфазного
выпрямителя приведены на рис.8. До
![]() выпрямитель
работает в выпрямительном режиме (А-при
α=25°, В-при α=0°). При
выпрямитель
переходит в инверторный режим: ток и
напряжение имеют разные знаки.
выпрямитель
работает в выпрямительном режиме (А-при
α=25°, В-при α=0°). При
выпрямитель
переходит в инверторный режим: ток и
напряжение имеют разные знаки.