

МДК 04.02 ПР-1
Практическая работа №1
Исследовать индуктивный датчик перемещений, изучить конструкцию и работу, схемы включения и статические характеристики индуктивных датчиков.
Общие сведения:
1 Устройство и принцип действия индуктивного датчика
Простейший индуктивный датчик представляет собой дроссель с переменным воздушным зазором в магнитопроводе. На рис. 6.1 показаны две наиболее распространенные конструктивные схемы индуктивных датчиков на одном сердечнике. Это одинарные индуктивные датчики. На сердечнике 1 из электротехнической стали размещена обмотка 2, подключаемая к источнику переменного напряжения. Магнитный поток в сердечнике замыкается через якорь 3, который может перемещаться относительно сердечника 1. Якорь 3 механически связан с деталью, перемещение которой необходимо измерить.
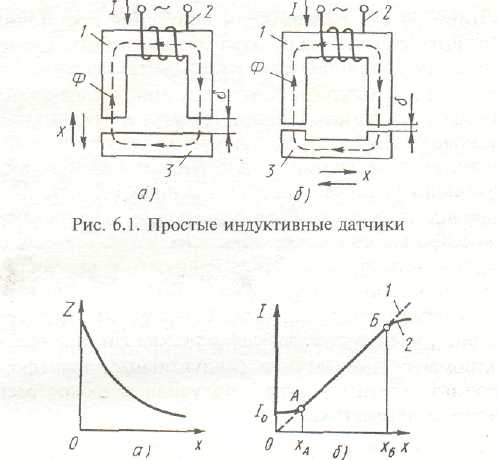
Рисунок 78 Простые индуктивные датчики
Эта деталь на рисунке не показана, но перемещение х ее может происходить в вертикальном направлении. Перемещение якоря изменяет магнитное сопротивление магнитной цепи, состоящей из сердечника, якоря и воздушного зазора δ. Следовательно, изменится индуктивность обмотки 2. Поскольку эта обмотка включена на переменное напряжение, ток в обмотке 2 будет определяться ее полным сопротивлением, в которое входит и индуктивное сопротивление. С увеличением воздушного зазора магнитное сопротивление увеличивается, а индуктивность, индуктивное и полное сопротивления уменьшаются. Следовательно, ток в обмотке увеличивается. Полагая ток I в обмотке за выходной сигнал датчика, а перемещение х — за входной сигнал, имеем выходную статическую характеристику в виде графика I=f(х).
2 Вывод уравнения статической характеристики индуктивного датчика
Рисунок 79 Характеристики индуктивного датчика.
Найдем выражение, определяющее зависимость тока в обмотке датчика от перемещения. Анализ проведем применительно к конструктивной схеме, показанной на рисунке 78 а. В этом случае приращение перемещения х всегда равно приращению зазора δ, поэтому нам необходимо получить математическую зависимость тока I от зазора δ: I=f (δ).
 Пусть
обмотка датчика включена на напряжение
питания; u
= √2U
sin
w
t,
где U
—
действующее значение напряжения, w
— угловая
частота, рад/с. По закону Ома, действующее
значение тока в обмотке
Пусть
обмотка датчика включена на напряжение
питания; u
= √2U
sin
w
t,
где U
—
действующее значение напряжения, w
— угловая
частота, рад/с. По закону Ома, действующее
значение тока в обмотке
I=U/z, (32)
где z — полное сопротивление обмотки датчика, Ом, состоящее из активного R и индуктивного XL сопротивлений:
 z
= √R2
+ XL2.
(33)
z
= √R2
+ XL2.
(33)
Индуктивное сопротивление XL пропорционально индуктивности L и частоте питания f:
XL = 2πfL = w L. (34)
z = √R2 + (2πfL)2. (35)
Индуктивность обмотки датчика с числом витков w
L = w Ф/ I, (36)
где Ф — магнитный поток сердечника, Вб. Принимаем, что весь магнитный поток проходит через воздушный зазор, т. е. потоки рассеяния отсутствуют. Тогда
Ф = I w /Rм. (37)
Здесь Rм — магнитное сопротивление магнитопровода датчика, Гн-1. Это сопротивление слагается из сопротивления стали сердечника и якоря RCT и сопротивления воздушного зазора RB:
Rм = RCT + RB. (38)
Сопротивление воздушного зазора пропорционально удвоенной длине воздушного зазора δ, поскольку магнитный поток проходит через воздушный зазор дважды:
RB = 2δ/(µ0sм), (39)
где sм — поперечное сечение воздушной части магнитопровода, равное активной площади поперечного сечения сердечника в зоне воздушного зазора, м2; µ0 = 4π·10-7 Гн/м — магнитная проницаемость вакуума (магнитная постоянная).
После подстановки (6.5) и (6.6) в (6.4) получим выражение для магнитного потока:
 (40)
(40)
Выражение для индуктивности получаем подстановкой (6.7) в (6.3):
 (41)
(41)
Индуктивное сопротивление обмотки
 (42)
(42)
Полное сопротивление обмотки
 (43)
(43)
Анализ формулы (43) показывает, что с увеличением воздушного зазора (а следовательно, и перемещения) полное сопротивление уменьшается, стремясь в пределе к величине активного сопротивления обмотки R. Ток в обмотке датчика
 (44)
(44)