

Лабораторной работе № 1 Исследование разомкнутой линейной систем
Вариант 8
Описание системы
Исследуется система, описываемая математической моделью в виде передаточной функции
n=[1.7 1.36 0.204];d=[1 1.1857 0.7673 0.4592]; f = tf ( n, d )
Transfer function:
1.7 s^2 + 1.36 s + 0.204
-----------------------------------
s^3 + 1.186 s^2 + 0.7673 s + 0.4592
2. Результаты исследования
нули передаточной функции
-0.6000
-0.2000
полюса передаточной функции
-0.9000
-0.1428 + 0.6999i
-0.1428 - 0.6999i
коэффициент усиления звена в установившемся режиме
k = 0.4443
полоса пропускания системы
b =5.4554 рад/сек
модель системы в пространстве состояний
a =
-1.186 -0.3836 -0.4592
2 0 0
0 0.5 0
b =
2
0
0
c = 0.85 0.34 0.102
d = 0
статический коэффициент усиления после изменения матрицы

k1 = 0.4443
связь между k
и k1
объясняется тем, что при
нахождении статического коэффициента
передачи через модель в пространстве
состояний мы используем формулу ( ),
в которой есть слагаемое D.
Оно в рассматриваемом нами случае
системы с одним входом и одним выходом
просто скалярная величина, значение
которой мы изменили с нуля на единицу.
),
в которой есть слагаемое D.
Оно в рассматриваемом нами случае
системы с одним входом и одним выходом
просто скалярная величина, значение
которой мы изменили с нуля на единицу.
модель исходной системы в форме «нули-полюса».
1.7 (s+0.6) (s+0.2)
---------------------------------
(s+0.9) (s^2 + 0.2857s + 0.5102)
коэффициенты демпфирования и частоты среза
-
Полюс передаточной функции
Собственная частота, рад/сек
Постоянная времени, сек
Коэффициент демпфирования
-0.9000
-0.1428 + 0.6999i
-0.1428 - 0.6999i
0.2000
0.2000
0.1000
5
2
2
1.0000
0.2000
0.2000
Импульсные характеристики систем f и f_ss получились, одинаковые, потому что для модели f_ss (
 )
импульсная характеристика построена
неправильно, так как в момент времени
t=0
она должна быть бесконечной по величине,
и система Matlabв
таком случае строит импульсную
характеристику для строго правильной
части, принимая
)
импульсная характеристика построена
неправильно, так как в момент времени
t=0
она должна быть бесконечной по величине,
и система Matlabв
таком случае строит импульсную
характеристику для строго правильной
части, принимая
 ,
т. е. для модели f.
,
т. е. для модели f.
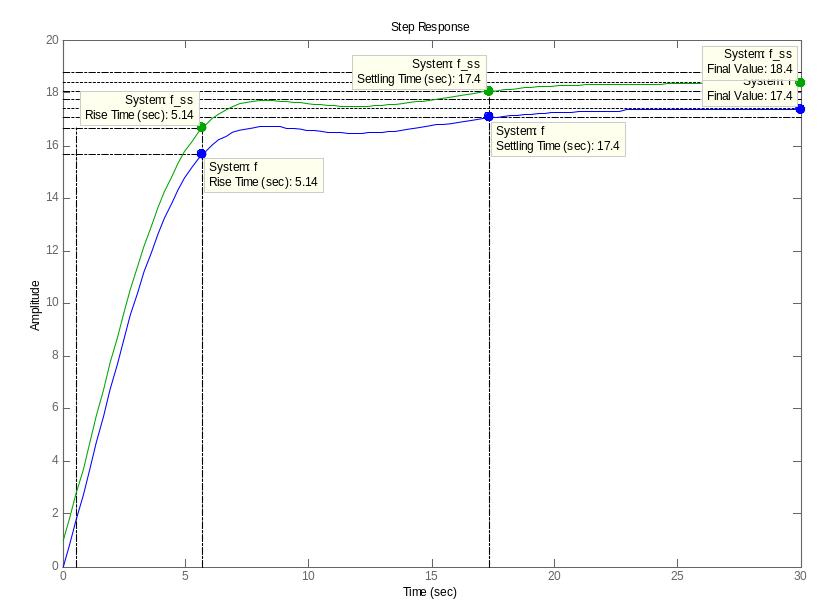
Переходные процессы исходной и модифицированной систем
амплитудная частотная характеристика
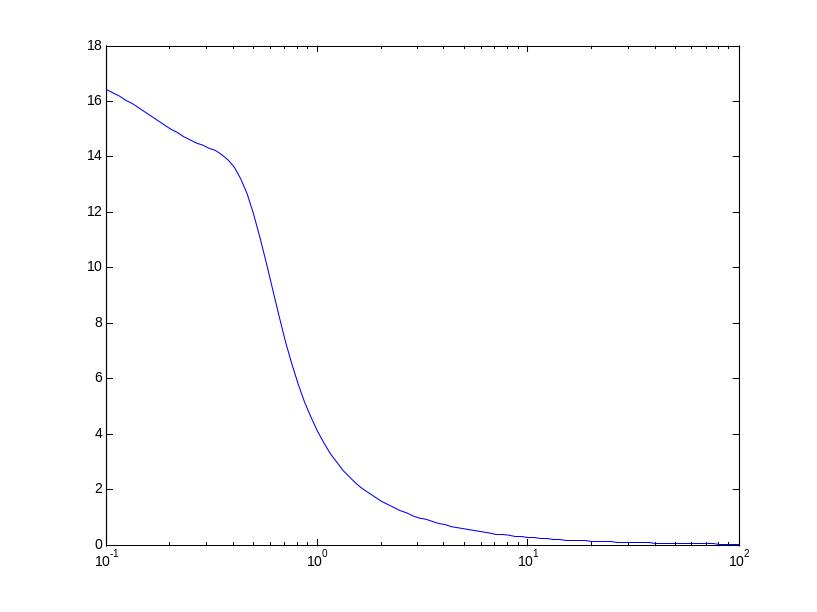
для того, чтобы найти статический коэффициент усиления по АЧХ, надо посмотреть значение АЧХ при
 .
.для того, чтобы найти полосу пропускания по АЧХ, надо посмотреть при каком значении частоты коэффициент усиления равен 0,707.
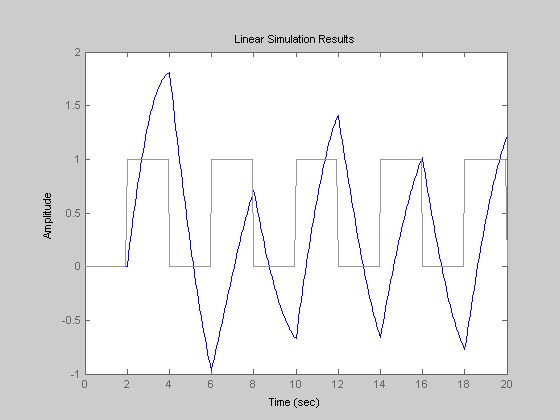
реакция на сигнал, состоящий из прямоугольных импульсов
Вывод: в данной лабораторной работе освоили методы анализа одномерной линейной непрерывной системы с помощью среды MATLAB. Научились водить модель системы в виде передаточной функции, строить эквивалентные модели в пространстве состояний в форме «нули полюса», определять коэффициент усиления в установившемся режиме и полосу пропускания системы, строить импульсную и переходную характеристику, карту расположения нулей и полюсов, частотную характеристику, использовать окно LTIViewer для построения различных характеристик , и строить процессы на выходе линейной системы при произвольном входном сигнале.