

7.1 Орнықтылық жөнінде жалпы түсінік
Жүйенің орнықтылығы деп оның тепе-теңдік күйінен ауытқуына себеп болған әсерді алып тастағаннан кейін, бастапқы орнықтылық қалпына оралу қабілеттілігін айтады.
Автоматты реттеу жүйесінің статикалық тепе-теңдік күйі әртүрлі болады. Жүйенің орнықтылық режиміндегі тепе-теңдік күйі үш түрге ажыратылады (7.1-сурет): орнықты, орнықсыз және бейтарап.

7.1-сурет. Тепе-теңдік күйдін үш түрі: а — орнықты; б— орнықсыз; в - бейтарап.
Тепе-теңдік күйдің мүмкін болатын түрлерін алдымен беттің әртүрлі нүктелерінде орналасқан шариктің қозғалыс бағытынан қарастырайық: а) шарикті бастапқы тепе-теңдік күйіне қайтарушы F күші шарик беттің қай жерінде жатса да пайда болады; б) шарик тепе-теңдік күйінен сәл ауытқыса F күші пайда болып, оны одан әрі тепе-теңдік күйінен ауытқытуға тырысады; в) шарик беттің қай нүктесінде жатса да орнықты күйінде қалады.
Шарик мысалындағы тепе-теңдік түрлері жөніндегі ұғымды автоматты реттеу жүйесінде де қарастыруға болады.
Жұмыс істеп тұрған автоматты жүйеге әртүрлі тұрақты сыртқы қозулар әсер етуі салдарынан реттелетін шығыстық шаманың мәні жиі өзгеріп отырады. Жүйенің автоматты реттеуіші осы реттелетін шаманы берілген мәнге келтіруге ұмтылады. Бірақ тұтастай алғанда жүйеде инерциялық массалар, реактивті элементтер (индуктивтік, сыйымдылық) болатындықтан, оның орнықты қалпына келуі, немесе қалыптасқан бір күйден келесіне өтуі лезде емес, белгілі түрде кешігіп жүзеге асады. Жүйеде өтпелі процесс туындайды. Бұл жағдайда, егер жүйе қозу әрекеті тоқталғаннан кейін қалыптасқан күйге оралса, ол орнықты. Егер оралмаса, онда ор-нықсыз. Орнықсыз жұмыс кері байланыспен қамтылған АРЖ-ның барлығында туындауы ықтимал.
Қазіргі автоматты жүйелерде мынадай үш талаптар орындалуы қажет: орнықтылық шарты, өтпелі процеске және қалыптасқан режимге қойылатын талаптар. АРЖ-ның орнықтылығын анықтау мәселесі басты болып саналады, өйткені орнықсыз жүйелер іс жүзінде жарамсыз.
10.1. Реттеу жүйесінің синтезі жөнінде негізгі түсінік
Автоматты басқару теориясындағы пайдаланылатын барлық мәселелерді екі үлкен классқа біріктіруге болады - автоматты жүйелерді талдау және синтездеу мәселелері.
Жүйені талдау деп - толық, белгілі құрылымдық схемасы және берілген параметрлері арқылы оның статикалық немесе динамикалық қасиеттерін анықтауды айтады.
Жүйенің синтезі деп - автоматты реттеудің белгілі сапа көрсеткіштері бойынша оның құрылымдық схемасын, элементтері арасындағы байланыстарды анықтауды айтады.
Жалпы автоматты реттеу жүйесі бір-бірімен өзара байланысты реттелуші объект пен реттеуші органнан тұратыны белгілі. Бұл жүйені құрар алдында сериялық жабдықтар каталогынан реттеуші органды, орындаушы құрылғыны, датчикті таңдап алады. Бұл элементтер реттелуші объектімен бірге жүйенің өзгермейтін (берілген) бөлігін құрайды. Соңынан, жүйенің статикалық және динамикалық сипаттамаларына қойылатын талаптар негізінде оның функционалдық және корректирлеуші құрылғылардан тұратын өзгермелі бөлігін анықтайды. Корректирлеуші құрылғылар жүйенің контурына тізбектеле, параллель немесе кері байланыс түрінде қосылып, оның динамикалық қасиеттерін жоғарылатуға мүмкіндік туғызады.
Сонымен автоматты реттеу жүйесінің синтезі келесі кезеңдерден тұрады:
1) Реттеу объектісінің қасиеттерін талдау, статикалық және динамикалық сипаттамаларын анықтау;
2) Реттеу жүйесін канағаттандыратын реттеу сапасының шарттарын, оптималдау критерийлерін негіздеу және тұжырымдау;
Техникалық құралдарды таңдап алып, жүйенің құрылымдық схемасын іске асыру;
Оптимал динамикалық сипаттамаларды синтездеу;
Оптимал режимді аппроксимациялау (жуықтату), яғни, реттеу сапасымен жүйенің жұмысын іске асырудың техникалық тұрғыдағы күрделі еместігі және оның сенімділігі арасындағы ымыраға келе отыра, жүйенің қалаулы динамикалық сипаттамасын алу;
Бүкіл жүйенің қалаулы динамикалық сипаттамасын толығымен қамтамасыз ететін корректирлеуші құрылғының динамикалық сипаттамасын анықтау;
Корректирлеуші құрылғының схемасын, техникалық пайдалану жолын және параметрлерін таңдап алу;
8) Қойылған талаптарға сай келетін алынған автоматты реттеу жүйесінің схемасына талдау жүргізу.
Жалпы, автоматты реттеу жүйесінің қалаулы динамикалық сипаттамаларын арнайы корректирлеу құрылғыларын қолдану арқылы алады, себебі мұндай құрылғылардың параметрлерін жеңіл түрде тиімді өзгертіп отыруға болады. Коррекциялау құрылғылары жүйедегі негізгі сигнал өтетін трактіге тізбектеле немесе параллель қосылады.
Параллель қосылған корректирлеу құрылғысымен бүкіл жүйені немесе оның элементтерін жеке қамтуға болады.
Тізбектеп қосылған корректирлеу құрылғысы қателік сигналын түрлендіру және реттеу заңын өзгерту үшін қолданылады.
Автоматты басқару жүйесінің құрылымы
Автоматты басқару жүйесі құрылымы жағынан әр түрлі болуы ықтимал. Жалпы жағдайда бұл кұрылымға белгілі бір ерекше қасиеттерімен және аралық әсер беру жолдарымен жіктелген автоматты жүйені түзетін дербес бөліктердің жиынтығы жатады. Автоматты басқару жүйесінің алгоритмдік, функционалдық және конструкциялық құрылымдары болады.
Автоматты басқару жүйесінің алгоритмдік құрылымы деп, әр бөлігі ақпаратты түрлендірудегі белгілі бір алгоритмді орындауга арналған құрылымды айтады.
Сигналды түрлендірудің элементар алгоритміне сейкес келетін автоматты жүйенің алгоритмдік құрылымының бір бөлігін элементар алгоритмдік буын деп атайды. Әрбір элементар буын бір ғана математикалық, немесе логикалық операцияны орындайды. Схемада элементар буынды ішінде сигналды түрлендіруге сәйкес оператор жазылған тікбұрышпен кескіндейді. Кей кезде оператордың орнына шығыстық сигнал мен кірістік сигнал аралығындагы байланысты көрсететін график немесе өтпелі функция қисығы көрсетіледі.

2.1-сурет. Элементар алгоритмдік буындар: (а-статикалық; б— динамикалық; в—арифметикалық; г—логикалық
Элементар буындар статикалық, динамикалық, арифметикалық және логикалық болып ажыратылады. Статикалық буынның шығыстық сигналының лездік мәні кірістік сигналдың уакыт ағымындағы өзгеруінің сипатына емес, оның тек осы мезеттегі мәніне ғана тәуелді болады. Статикалық буын ретінде, мысалы, екіпозициялық релені алуға болады (2.1,а-сурет). Суретте реленің кірістік және шығыстық сигналдарының өзгеру графигі де көрсетілген.
Динамикалық буын кірістік сигналды уакыт ағымында интегралдау және дифференциалдау операцияларына сәйкес түрлендіреді. Динамикалық буынның шығыстық сигналының мәні кірістік сигналдың қазіргі уакыт ағымындағы ғана мәніне емес, оның алғашқы мәндеріне де, яғни кірістік сигналдың өзгеру сипатына тәуелді. Динамикалық буынның мысалы ретінде дифференциалдауыш буынды алуға болады (2.1,б-сурет).
Арифметикалық буын қосу, алу, көбейту, бөлу арифметикалық амалдарының біреуін іске асырады. Автоматикада, сигналдарды алгебралық қосындылайтын арифметикалық буын, косындауыш (2.1,в-сурет) жиі қолданылады. Суретте сонымен бірге электрлік (гальваникалық) және магниттік сигналдарды да қосындылау мысалдары келтірілген.
Логикалық көбейту («ЖӘНЕ»), қосу («НЕМЕСЕ»), логикалық терістеу («ЕМЕС») және т. б. логикалық операцияларды орындайтын буынды логикалық деп атайды. Жалпы логикалық буынның кірістік және шығыстық сигналдары дискретті болады да логикалық айнымалылар ретінде қарастырылады (2.1,г-сурет).
Автоматты басқару жүйесінің функционалдық құрылымында әрбір бөлік белгілі бір қызметті атқарады. Қызмет ретінде автоматты басқарушы құрылғының ақпарат алу, оны өңдеу, т. б. осы секілді негізгі қызметін, сонымен бірге сигналды беру, оларды салыстыру, ақпаратты беру түрін өзгерту тәрізді дербес қызметін айтуга болады.
Егер автоматты басқару жүйесі құрылымының әр бөлігі жеке конструкциялық тұтастық құратын бөлік болса, ондай құрылымды конструкциялық құрылым деп атайды.
Басқару жүйесінің құрылымын график бойынша кескіндеуді құрылымдық схема дейді. Белгілі бір ерекшеліктерімен топталган автоматты жүйе бөлігін график түрінде, ішінде бұл жүйенің оның кандай бөлігі екендігін білдіретін шартты белгісі бар төртбұрышпен кескіндейді. Автоматты жүйенің бөліктерінің арасында берілетін әсер жолын, сол әсер берілетін бағыт бойымен бағыттауыш сызықпен кескіндейді.
Автоматты басқару жүйесінің, не автоматты құрылғының құрылымдық схемасындағы бөліктері арасындағы берілетін әсердің бағыты мен жолын көрсететін қарапайым құрамдас бөлігін құрылымдық схеманың байланысы деп атайды.
Автоматты жүйенің құрылымдық схемасының байланысы негізгі, қосымша және кері байланыстар болып ажыратылады.
Негізгі байланыс деп, автоматты басқару жүйесінің негізгі тізбегі бойындағы бөліктерінің арасындағы түзілетін байланысты айтады.
Қосымша байланыс деп, негізгі тізбекке не оның қайсыбір бөлігіне қосалқы түрде әсер берілу жолын түзетін автоматты басқару жүйесінің құрылымдық схемасының байланысын айтады.
Мысал ретінде 2.2-суретте басқару объектісінен (БО), басқарушы (БҚ), және салыстырушы (СҚ) құрылғысынан тұратын автоматты басқару жүйесінің қарапайым құрылымдық схемасы көрсетілген. Автоматты басқару жүйесінің кірісі және шығысы болады.
Кіріс деп, сырттан жүйеге не құрылғыға, оның жеке бөліктеріне тікелей әсер берілетін автоматты басқару жүйесінің әсер тізбегінің бөлігін айтады. 2.2-суретте әсер беру тізбегінің бір бөлігі жүйенің g(t) жоспарлау әсері берілетін кірісі де, екінші бөлігі f(t) қоздыру әсері берілетін кірісі.
Шығыс деп, автоматты жүйеде не оның элементтерінде қызмет алгоритміне сәйкес қалыптасқан әсерді сырт жаққа беретін автоматты басқару жүйесінің әсер тізбігінің бөлігін айтады. 2.2-суретте X автоматты басқару жүйесінің шығысы.
Автоматты басқару жүйесінің әсер тізбегі деп ішкі және сыртқы әсерлер берілетін жеке жолдардың жиынтығын айтады. Құрылымдық схемада әсер тізбегінің жеке жолдары тұтас және бағыттауыш сызықтармен кескінделеді.
Автоматты басқару жүйесінің не оның қарастырылатын бөлігінің шартты түрде бөлінген, кірісінен шығысына қарай бағытталған әсер тізбегін жүйенің негізгі әсер тізбегі деп атайды.
Негізгі әсер тізбегі автоматты жүйені немесе жүйе бөлігін қандай мақсат үшін пайдаланатынына қарай іріктелінеді.
Жалпы алғанда автоматты жүйенің басқарушы құрылғысы негізгі әсер тізбегіндегі фукнционалды құрылғысынан (ФҚ), қосымша байланыс құрылғысынан (ҚБҚ) және қосымша кері байланыс құрылғысынан (ҚКБҚ) тұрады. Басқарушы құрылғы өзінін шығыс тізбегінде тұрған атқарушы тетікке (АТ) әсерін тигізеді, ал ол өз кезегінде реттеуші орган (РО) арқылы басқарылатын объектіге (БО) әсер етеді. Басқарылатын шама өлшеуіш құрылғысымен (ӨҚ) өлшенеді.
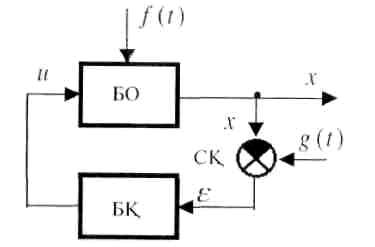
2.2-сурет. Автоматты басқару жүйесінің қарапайым құрылымдық схемасы
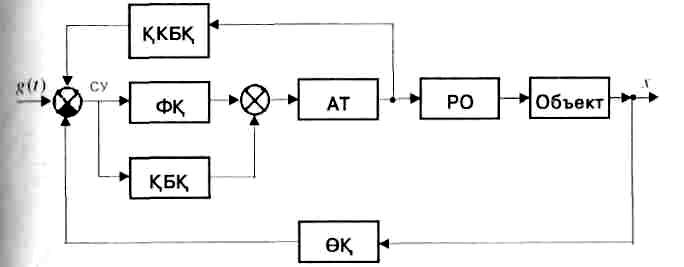
2.3-сурет. Автоматгы басқару жүйесінің жалпы функционалдық схемасы
Сонымен, жалпы жағдайда автоматты реттеу жүйесінің құрылымын атқарушы тетігінде қосымша байланыс тізбегі бар, 2.3-суретте келтірілгендей функционалды схема түрінде көрсетуге болады.