

Конструкции манипуляторов роботов. Типовые звенья.
Звеном системы называется ее элемент, обладающий определенными свойствами в динамическом отношении. Звенья систем регулирования могут иметь разную физическую основу (электрические, пневматические, механические и др. звенья), но относится к одной группе.
Простейшие типовые звенья:
• пропорциональное (усилительное)
• интегрирующее,
• дифференцирующее,
• апериодическое,
• колебательное,
• запаздывающее.
2 Пневмоприводы и вакуумные захваты. Преимущества и недостатки.
Пневмопривод - один из основных современных видов привода основанный на использовании в качестве рабочей среды сжатого или разреженного воздуха. Он состоит из пневматического двигателя и системы управления. Сжатый в компрессоре воздух хранит накопленную потенциальную энергию до тех пор, пока он не подается в пневмодвигатель и не начинает в нем расширяться. При его расширении потенциальная энергия переходит в кинетическую энергию выходного звена этого двигателя, например, поршня со штоком пневматического цилиндра, который соединен силовой передачей с рабочим органом машины и приводит его в движение. Преимущества:
Относительная простота конструкции и эксплуатационного обслуживания;
Низкая стоимость и быстрая окупаемость затрат;
Надежность работы в широком диапазоне температуры, высокой влажности и запыленности окружающей среды;
Пожаро- и взрывобезопасность;
Большой срок службы, достигающий 10 000—20 000 ч.;
Высокая скорость перемещения выходного звена пневматических исполнительных устройств;
Легкость получения и относительная простота передачи энергоносителя (сжатого воздуха), возможность снабжения им большого количества потребителей от одного источника;
Отсутствие необходимости в защитных устройствах при перегрузке.
Недостатки:
Может вызвать ударные нагрузки;
Пневмоприводы имеют, как правило, более низкий КПД сравнении с гидроприводами, а также требуют применения смазочных устройств;
Невозможность обеспечить плавное перемещение рабочих органов машин при колебаниях нагрузки;
Сложность обеспечения точной остановки выходного звена в любом промежуточном положении.
Скорость передачи пневматических командных сигналов по трубопроводам ограничена скоростью распространения звука в воздушной среде.
Вакуумные захватные устройства - обеспечивают удержание детали притягиванием к какой-либо поверхности. Основными элементами вакуумных захватов служат присоски и устройства для создания вакуума.
Преимущества:
Большая сила притяжения на единицу поверхности;
Высокая точность базирования благодаря жесткости сердечника;
Быстрота захвата детали;
Простота конструкции: катушки и сердечники могут быть легко изготовлены потребителем.
Недостатки:
Пригодны для деталей только из намагничивающихся материалов.
Сопутствует некоторый остаточный магнетизм захвата и детали, вызывающий опасность загрязнения и повреждения поверхности детали захвата;
Катушки нагреваются, но конструкция долговечна.
3. Что такое тензор?
Тензор
— объект линейной алгебры, линейно
преобразующий элементы одного линейного
пространства в элементы другого. Частными
случаями тензоров являются скаляры,
векторы, билинейные формы и т. п.
Часто тензор представляют как многомерную
таблицу
![]() (число
сомножителей совпадает с валентностью
тензора, а их величина — с размерностью
основного пространства), заполненной
числами (компонентами тензора). Такое
представление возможно только после
выбора базиса (или системы координат),
при смене базиса компоненты тензора
меняются определённым образом, при этом
сам тензор от выбора базиса не зависит
(это можно увидеть уже на примере
вектора).
(число
сомножителей совпадает с валентностью
тензора, а их величина — с размерностью
основного пространства), заполненной
числами (компонентами тензора). Такое
представление возможно только после
выбора базиса (или системы координат),
при смене базиса компоненты тензора
меняются определённым образом, при этом
сам тензор от выбора базиса не зависит
(это можно увидеть уже на примере
вектора).
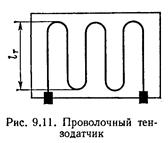
Тензорезистор - резистор, сопротивление которого изменяется в зависимости от его деформации. Тензорезисторы используются в тензометрии. С помощью тензорезисторов можно измерять деформации механически связанных с ними элементов. Тензорезистор является основной составной частью тензодатчиков, применяющихся для косвенного измерения силы, давления, веса, механических напряжений, крутящих моментов и пр.
6. Какие силы действуют на звенья манипуляторов
Кведущему звенумеханизма приложена движущая сила. За время своего действия или за один цикл она ускоряет движение ведущего звена, совершая положительную работу. К ведомому звенумеханизма приложена сила полезного (производственного) сопротивления. Она замедляет движение ведущего звена, совершая отрицательную работу. К силам непроизводственных (вредных) сопротивлений относят силы сопротивления среды, в которой функционирует механизм, и силы трения, возникающие в кинематических парах. Силы тяжести звеньев при подъеме их центров масс оказываются силами сопротивления, а при опускании центров масс – силами движущими. За цикл движения механизма работа сил тяжести равна нулю.