

![]() МІНІСТЕРСТВО
ОСВІТІ І НАУКИ УКРАЇНІ
МІНІСТЕРСТВО
ОСВІТІ І НАУКИ УКРАЇНІ
УКРАЇНСЬКА ІНЖЕНЕРНО-ПЕДАГОГІЧНА АКАДЕМІЯ
КАФЕДРА СИСТЕМ УПРАВЛІННЯ
ПРОМИСЛОВИМИ УСТАНОВКАМИ І ОБ’ЄКТАМИ
Тіщенко О.О.
Навчально-методичний посібник з дисципліни
Елекромеханічні та напівпровідникові перетворювачі енергії
Спеціальність
6.010104.29
Харків 2008
МІНІСТЕРСТВО ОСВІТІ І НАУКИ УКРАЇНІ
УКРАЇНСЬКА ІНЖЕНЕРНО-ПЕДАГОГІЧНА АКАДЕМІЯ
КАФЕДРА СИСТЕМ УПРАВЛІННЯ
ПРОМИСЛОВИМИ УСТАНОВКАМИ І ОБ’ЄКТАМИ
Навчально-методичний посібник з дисципліни
Елекромеханічні та напівпровідникові перетворювачі енергії
Для студентів денної та заочної форм навчання спеціальності 6.010104.29
Затверджено
Науково - Методичною Радою
Української інженерно –
педагогічної академії
протокол №3 від 25.11.2008 р
Харків 2008
Лекція 1
Введення
Перетворювачі енергії (ПЕ) класифікуються по видах перетворюваної енергії на вході і на виході ПЕ. Для ПЕ, зв'язаних з використанням електроенергії, можна розділити їх на наступних (за способом перетворення):
електромеханічні (ЕМПЕ);
статичні (СТПЕ).
ЕМПЕ пов'язані з перетворенням механічної енергії в електричну і навпаки, а також для перетворення одного роду електричної енергії в іншій, цей вид ПЕ реалізується на електричних машинах.
СТПЕ пов'язані з перетворенням одного роду електричної енергії в іншій. Цей вид ПЕ реалізується на напівпровідникових (ПП) і електромагнітних перетворювачах.
Перетворення механічної енергії в електричну виконується електричними генераторами (ЕМПЕ), які приводяться в обертання за допомогою турбін, ДВС і інших первинних двигунів.
На сучасних електростанціях зазвичай виробляється змінний струм і для зміни величини напруги застосовуються трансформатори (це СТПЕ). Їх відносять зазвичай до машин.
Залежно від роду струму електричні машини (ЕМ) підрозділяються на машини постійного і змінного струму. ЕМ виготовляються на широкі межі потужностей від доль ватів до мільйонів квт і ват.
Загальні відомості про електричні машини
Перетворення енергії в сучасних ЕМ здійснюється за допомогою магнітного поля. Такі машини називаються індуктивними. Можливе створення і ємкісних машин, але вони не застосовуються. Кількість енергії в одиниці об'єму магнітного поля значно вища, ніж в електричному. Тому магнітні машини розвивають в одному габариті значно велику потужність.
Для отримання сильних магнітних полів застосовують феромагнітні сердечники, які є невід'ємною частиною ЕМ. При змінних полях сердечники шихтують (для ослаблення вихрових струмів). Іншими невід'ємними частинами є обмотки з провідникових матеріалів. Для електричної ізоляції обмоток застосовують різні електроізоляційні матеріали.
Основними конструктивними частинами ЕМ є також нерухома частина (статор) і рухома частина (ротор – для машин змінного струму, якір – для машин постійного струму). ЕМ може також мати токосъемник для з'єднання з рухомою частиною – це щітковий механізм, що контактує з колектором або кільцями.
Як буде показано далі ЕМ володіють властивістю оборотності: генератор може працювати в руховому режимі і навпаки. Тобто в кожній ЕМ і трансформаторі напрям енергії може бути змінене на зворотне.
Перетворення енергії в ЕМ пов'язане з її втратами, викликаними перемагнічуванням феромагнітних сердечників, проходженням струму через обмотки, тертям і так далі Тому споживана ЕМ потужність завжди більше корисною, а до. п. д. < 100%. Все ж таки ЕМ в порівнянні з іншими перетворювачами енергії (ПЕ) є вельми досконалими ПЕ з високим до. п. д. Так в могутніх ЕМ до. п. д. рівний 98 - 99,5%, а в ЕМ потужності 10 Вт – до. п. д. рівний 20 ? 40%. Такі величини до. п. д. у інших машинах недосяжні.
Високі енергетичні показники ЕМ, зручність підведення і відведення енергії, можливості виконання на найрізноманітніші потужності, швидкості обертання, а також зручність обслуговування зумовили їх широке розповсюдження.
Втрати енергії в ЕМ збільшуються з підвищенням її навантаження, при цьому збільшується і її нагрівання. Тому найбільша потужність навантаження, що допускається для даної ЕМ визначається її нагріванням, а також механічною міцністю окремих частин ЕМ, умовами токосъема на ковзаючих контактах. Напруженість роботи ЕМ змінного струму відносно електромагнітних навантажень, втрат енергії і нагрівання визначається не активною, а повною потужністю, оскільки величина магнітного потоку в ЕМ визначається повною напругою, а не його активними складовими. Корисна потужність, на яку розрахована ЕМ, називається номінальною. Всі інші величини, які характеризують роботу ЕМ при цій потужності, також називаються номінальними. Це: номінальна напруга, струм, швидкість обертання, до. п. д. і ін., а для ЕМ змінного струму також номінальна частота і номінальний cos ?.
Джерела і приймачі електричної енергії.
джерело електричною приймач електричної
енергії (генератор) енергії (двигун)
Друге рівняння Кирхгофа:
Eu + En – jXuI – jXnI = ruI + rnI
Eu – ruI – jXuI = rnI + jXnI – En = U
джерело приймач
U = E – rI – jXI Джерело

U = rI + jXI +(- E) Приймач
Основні номінальні величини указуються в паспортній табличці, прикріпленій до машини. Прийнято, що для двигуна номінальною потужністю є його корисна потужність на валу, а для генератора – електрична потужність, що віддається з його вихідних затисків.
Номінальна напруга ЕМ узгоджена в ГОСТ із стандартною номінальною напругою електричних мереж. Номінальна напруга для двигуна береться рівною стандартній напрузі мережі, а для генератора і вторинної обмотки трансформаторів на 5 – 10% збільшуються з метою компенсації падіння напруги в мережах.
Для двигунів постійного струму: 110, 220, 440 Ст.
Для генераторів постійного струму: 115, 230, 460 Ст.
Для двигунів змінного струму і первинної обмотки трансформатора: 220, 380, 660 В; 3, 6, 10 кВ.
Для генераторів змінного струму і вторинної обмотки трансформатора: 230, 400, 690 В; 3.15, 6.3, 11 і 22 кВ. З вищої напруги для первинної обмотки тансформаторов стандартами є: 35, 110, 150, 220, 330, 500 і 750 кВ, а для вторинної обмотки трансформаторів: 35.8, 121, 165, 242, 347, 525 і 787 кВ.
У більшості країн світу промислова частота струму – 50Гц, в США і інших країнах Америки – 60Гц. ЕМ харчуються напругою цих частот.
По потужності ЕМ підрозділяються на наступні групи:
до 0.5 кВт – машини вельми малої потужності;
0.5 – 20 кВт – машини малої потужності;
20 – 250 Квт – машини середньої потужності;
> 250 кВт – машини великої потужності.
Ці межі умовні.
Класифікація ПЕ
ПЕ має основне застосування як джерело живлення для різних електричних пристроїв. Перш за все треба розрізняти регульовані і нерегульовані ПЕ відносно вихідних параметрів, хоча НПЕ мають найчастіше свою власну систему регулювання (САР), що забезпечує стабільність всіх параметрів. Приклад НПЕ – турбіна – генератор (змінного або постійного струму), призначені для електропостачання різних споживачів напруги заданої величены, форми, частоти (стабільні показники якості). Приклад РПЕ – система Грама –Д, призначена для живлення регульованого двигуна постійного струму, наприклад, незалежного збудження.
Наступний етап класифікації ПЭ-физическая реалізація перетворення: електромеханічні або статичні перетворювачі (тут магнітні, напівпровідникові і так далі). Слід також розрізняти ПЕ по вигляду первинній енергії: електрична, механічна і ін.
Основним видом електромеханічного перетворювача є ЕМ Преобразованіє механічній енергії в електричну здійснюється генераторами, які приводяться в обертання за допомогою турбін, ДВС і інших первинних двигунів. Для приведення в рух різних виробничих механізмів використовуються електричні двигуни, де електрична енергія перетвориться в механічну. При передачі електричній енергії споживачам необхідно змінювати величину напруги. Для цієї мети використовують трансформатори – статичні електромагнітні апарати без частин, що обертаються. В принципі їх дії багато загального з електричними машинами, тому їх відносять до ЕМ. Залежно від роду струму розрізняють ЕМ постійного і змінного струму. ЕМ виготовляють на дуже широкі межі потужностей – від доль ватів до мільйона квт і вище.
Лекція 2
Машини постійного струму. Принцип дії і пристрій
машин постійного струму.
Пристрій простої машини.
1
3
4
n
2
1
3
4
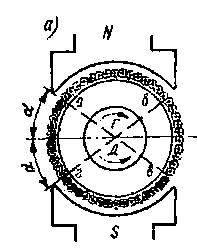
Мал. 1. Проста машина постоян- Мал. 2. Робота простої машини постійного
ного струму струму в режимі генератора (а) і двигате
ля (б)
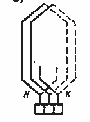
Нерухома частина – індуктор, який складається з полюсів і круглого сталевого ярма. Призначення індуктора – створення в машині основного магнітного потоку.
Частина, що обертає, – складається з якоря і колектора. Якір складається з сердечника і обмотки. Для токосъема – щітки.
Режим генератора.
B
E
 Е
– э. д. з. обертання
Е
– э. д. з. обертання
V
 епр=
В L V
епр=
В L V
L - активна довжина провідника
V – лінійна швидкість руху провідника
Повна э. д. з. якорі
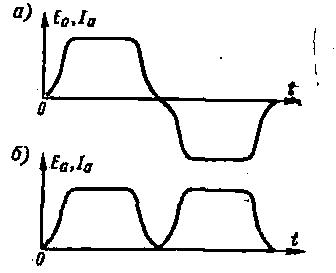
Мал. 3. Криві э. д. з. і струму простої машини в якорі (а) і в зовнішньому ланцюзі (б)
Частота э. д. з. f в двополюсній машині дорівнює швидкості обертання якоря n, вираженою в оборотах в секунду:
f = n
а в загальному випадку, коли машина має p пару полюсів з полярністю, що чергується
f = pn.
У генераторі колектор є механічним випрямлячем, який перетворить змінний струм обмотки якоря в постійний струм в зовнішньому ланцюзі.
Щоб отримати менші пульсації застосовують спеціальні обмотки і велику кількість пластин колектора.
Напруги на якорі генератора
Ua=Ea - Ia ra
За правилом лівої руки визначаємо напрям електромагнітних сил

Fпр.=B l Ia
Ці сили створюють механічний момент, що обертає, який називається електромагнітним моментом
Mэм. =Fпр Da =B l Da Ia
У режимі генератора цей момент діє проти напряму обертання якоря.
Режим двигуна. Якщо підвести напругу від зовнішнього джерела до якоря. У режимі двигуна колектор перетворює споживаний постійний струм в струм в обмотці якоря і працює механічним інвертором струму. Напрям струму протилежний по відношенню до режиму генератора, а э. д. з. таке ж
Ua=Ea+ Ia la.
У генераторі Ua < Ea, в двигуні – Ua > Ea .
Оборотність – можливість працювати в режимі генератора і двигуна.
Для переходу машини з генераторного в руховий режим при збереженні всіх інших умов (полярності полюсів, щіток, напряму обертання) потрібна тільки зміна напрям струму в обмотці якоря.
Перетворення енергії.
а) б)




Мал. 4. Напрями э. д. з., струму і моментів в генераторі (а) і двигуні (б) постійного струму.
По першому закону Ньютона в застосуванні до тіла, що обертається, моменти, що діють на нього, знаходяться в рівновазі. Тому в генераторі електромагнітний момент
Мем = Мв – Мтр – Мс
де Мв – момент обертання первинного двигуна, Мтр – момент тертя, Мс – момент від електромагнітних втрат.
У двигуні
Мем = Мв + Мтр + Мс
де Мв – момент навантаження робочої машини.
Електромагнітна потужність
Рем = Мем(
де ( = 2?n
Якщо врахувати, що
то
Рем = 2B l DaIa?n = 2B l V Ia
або
Рем = Еа Ia
У обмотці якоря розвивається внутрішня електрична потужність якоря
Ра = Еа Ia
Рем = Ра
Цю рівність відображає процес перетворення механічної енергії в електричну і навпаки.
Помножимо ці співвідношення на Ia і отримаємо для генератора
Ua Ia = Еа Ia - Ia2ra
для двигуна
Ua Ia = Еа Ia + Ia2ra.
Лівими частинами цих виразів є електричні потужності на затисках якоря, перші члени правих частин – електромагнітну потужність якоря і останні члени – електричні втрати потужності в якорі.
Ці співвідношення вірні також і для реальної ЕМ постійного струму (і не тільки для простої) і відображають процес перетворення енергії в ЕМ постійного струму.
Згодне їм, механічна потужність, що розвивається на валу генератора первинним двигуном, за вирахуванням механічних і магнітних втрат, перетворюється на електричну потужність в обмотці якоря, а електрична потужність за вирахуванням втрат в цій обмотці видається в зовнішній ланцюг. У двигуні електрична потужність, що підводиться до якоря із зовнішнього ланцюга, частково витрачається на втрати в обмотці якоря, а решта частини цієї потужності перетворюється на потужність електромагнітного поля і остання – в механічну потужність, яка за вирахуванням втрат на тертя і втрат в сталі якоря передається робочій машині.
Подібні закономірності справедливі і для машин змінного струму.
Пристрій машини постійного струму (МПТ)
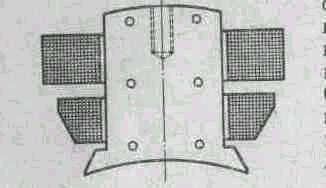 Сердечники полюсів
набираються із заліза (електротехнічна
сталь) товщиною 0,5 – 1 мм. Число головних
полюсів завжди парне. N і S чергуються.
Сердечники полюсів
набираються із заліза (електротехнічна
сталь) товщиною 0,5 – 1 мм. Число головних
полюсів завжди парне. N і S чергуються.
Потужність збудження 0,5 – 3%. Перша
цифра відноситься до машин потужністю в тисячі кіловат, а друга – до машин
Мал. 5. Головний полюс машини потужністю близько 5 кВт.
постійного струму.
Для поліпшення умов комутації між головними полюсами ставлять додаткові (сериесные) – при потужності більше 0,5 кВт.
Ярмо в сучасних машинах виконується із сталі. У МПТ ярмо станиною. Сердечник якоря набирається з штампованих дисків (а) або сегментів (б).
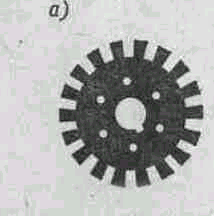
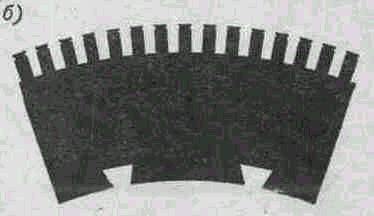
Мал. 6. Диск (а) і сегмент (б) сталі якоря.
Лекція 3.
Магнітний ланцюг (МЦ) машини постійного струму (МПТ) при холостому ході.
Метод розрахунку МЦ.
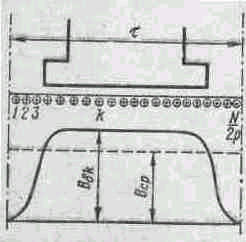
Основним магнітним потоком Фб називається потік повітряного зазору, що доводиться на один магнітний полюс машини. Величина Фб визначає величину індукованою в обмотці э. д. з.
При проектуванні МПТ необхідно знайти залежність Фб від струму збудження полюсів. Це завдання вирішується шляхом розрахунку МЦ при Ia=0. Досить розглянути (унаслідок симетрії) одну пару полюсів.
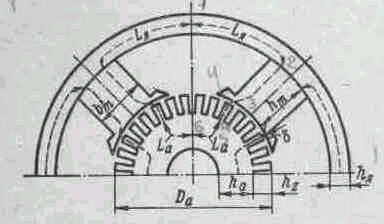
МЦ розраховується на основі закону повного струму для середньої магнітної лінії
![]()
Мал. 7. Магнітний ланцюг машини
постійного струму.
Точно обчислити інтеграл скрутно.
Тому МЦ розбивають на ділянки: повітряний зазор (б), зубці якоря (hz), спинку якоря (La),полюсы (ha), ярмо (Lя). Припускаючи, що H=const на кожній ділянці, отримаємо
2Hбб+2Hzhz+2Hala+2Hmhm+2HL=2Wвiв (3.1).
Окремі члени співвідношення (3.1) є намагніченням сили окремих ділянок МЦ, а їх сума – нулю н.с. машини на пару полюсів.
Оскільки
F = H l, то
2F( + 2Fz+ 2Fa+ 2Fm + 2Fя = 2Fв = 2wвIв (2-2б)
де Fв – повна н. з. на один полюс.
При розрахунку МЦ, виходячи із заданої величини Еа і пропорційній нею величині індукції в зазорі В(, визначають значення Н на окремих ділянках МЦ, вважаючи, що потік розподіляється рівномірно по перетину, визначають суму по 2-2а або 2-2б.
Подібний наближений розрахунок дає достатню для техніки точність.
Повна н.с. і магнітна характеристика машини
Н.с. машини на один полюс
Fв = F( + Fz + Fa+ Fm + Fя
Fв = wвIв
Якщо зробити розрахунок Fв для ряду значень Ф(, можна побудувати характеристики Ф( = f(Fв) або Ф( = f(Iв) – це криві намагнічення або магнітні характеристики машини.
Мал. 8. Магнітна характеристика машини
Ступінь насичення магнітного ланцюга характеризується коефіцієнтом насичення
Його можна визначити також по магнітній характеристиці машини
![]()
Електричні машини виготовляють з помірним насиченням (мале або велике насичення невигідне). Робоча крапка лежить вище за коліно (біля крапки З). Зазвичай До(= 1,20 ? 1,35, а іноді К( = 1,7 ? 2,0.
Значення індукції в МПТ
Ділянки магнітному ланцюгу
|
Значення індукції, Тл
|
Сердечник якоря
|
1,0 – 1,5
|
Зубці якоря в найменшому перетині
|
1,8 – 2,5
|
Полюс
|
1,2 –1,6
|
Ярмо станини: а) сталеве литво і сталевий прокат б) чавунне литво
|
1,1 – 1,2
0,5 – 0,7
|
Повітряний зазор
|
0,5 – 1,0
|
Наприклад для МПТ (двигун) на 14 квт, 220 В, 1000 об/мин, що має геометричні размеры:Dа =24,5 см, la = 12,5 см ( = 0,22 див. При номінальному потоці: F( - 1720 А, Fz = 350 А, Fa = 35 А, Fm = 110 А, Fя =230 А, Fв = 2445 А, К( =1,42.
Лекція 4
Якірні обмотки МПТ
Загальні відомості про якірні обмотках (ЯО) МПТ
Вимоги до ЯО:
обмотка повинна відповідати струму і напрузі при номінальній потужності;
обмотка повинна мати необхідну електричну, механічну і термічну міцність для терміну служби в 15 –20 років;
конструкція обмотки повинна забезпечувати токосъем без іскріння;
витрата матеріалу при заданій експлуатаційних показниках має бути мінімальним;
технологія виготовлення обмотки має бути простій.
У сучасних МПТ ЯО укладається в пазах на зовнішній поверхні якоря. Це барабанні обмотки. ЯО підрозділяється на петлевих і хвильових або буває поєднання цих типів.
Основний елемент ЯО – секція, яка складається з одного або деякої кількості послідовно сполучених витків і приєднаних своїми кінцями до колекторних пластин.
ЯО виконуються двошаровими для зручності розташування лобових частин.
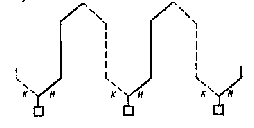
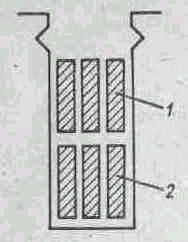 Одна
сторона секції ЯО розташована у верхньому
шарі одного паза (суцільні лінії), інша
– в нижньому шарі іншого паза (штрихові
лінії).
Одна
сторона секції ЯО розташована у верхньому
шарі одного паза (суцільні лінії), інша
– в нижньому шарі іншого паза (штрихові
лінії).
Одношарова обмотка – для Р< 0.5 кВт.
Секції обмотки з'єднуються один з одним в послідовний ланцюг – початок послідовної секції приєднується з кінцем попередньої секції до загальної колекторної пластини.
Мал. 9. Укладання об-
мотки в пазу.
1 – сторона секції верхнього шару;
2 – сторона секції нижнього шару.
Петлеві і хвильові обмотки названі по зовнішньому контуру контурів.
обмотки. обмотки.
Мал. 12.Соединение секції Мал. 13. З'єднання секції
петлевої обмотки. хвильової обмотки
Загальна кількість секцій S дорівнює кількості пластин До колектора До = S.
Кількість пазів якоря Z = K = S.
Зазвичай при Uн = 110 ? 220 В
К/2р = 12 ? 35
Велика кількість Z – це погано (конструктивно). Тому для скорочення кількості пазів в кожному шарі паза розташовують поряд декілька секційних сторін (Uн = 2, 3, 4, 5). При цьому
До = S = Uн Z
Т. е. у кожному реальному пазу Z знаходяться декілька елементарних пазів Zэ = Uн Z.


Мал. 14. Равносекционная (а) і ступінчаста (б) обмотка
Ступінчаста обмотка за умовами токосъема краща, але конструктивно складніше. Її застосовують в МПТ великої потужності Р ? 500 кВт.
Умови симетрії обмотки
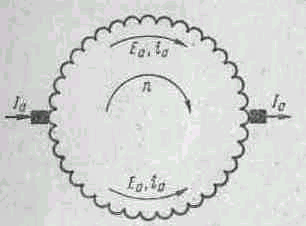 Секції сполучені
послідовно. Тут обмотка має одну пару
паралельних гілок а =1. У загальному
випадку а =1,2,3 (тут як би декілька
паралельно працюючих елементарних
машин). Необхідно, щоб Еа всіх гілок і
їх опору були рівні. В цьому випадку
струми всіх паралельних гілок іа будуть
рівні
Секції сполучені
послідовно. Тут обмотка має одну пару
паралельних гілок а =1. У загальному
випадку а =1,2,3 (тут як би декілька
паралельно працюючих елементарних
машин). Необхідно, щоб Еа всіх гілок і
їх опору були рівні. В цьому випадку
струми всіх паралельних гілок іа будуть
рівні
![]()
Мал. 15. Ланцюг простої
якірної обмотки.
Для цього необхідно: симетричний магнітний ланцюг, всі пари паралельних гілок мають бути еквівалентні. така обмотка називається симетричною. Для цього на кожну пару паралельних гілок повинне доводитися одне число секцій і колекторних пластин.
Умови симетрії обмотки
![]()
![]()
![]()
Э. д. з. секцій.
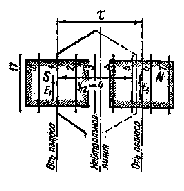
Крок секції.
Індукована э. д. з. максимальна, якщо у1 = ?, де ? – крок діаметральний, у1 – крок секції.
Зазвичай роблять у1 < ? – краще за умову комутації (це укорочений крок).
![]() ,
,
тут ? < 1 – дріб, при якій у1 – ц. ч.
Зірка э. д. з. При sin э. д. з. зручно користуватися Векторними діаграмами. Для цього виділяємо з несинусоїдальної э. д. з. першу гармоніку Вб1. Повне коло якоря відповідає p360? эл.
Пази зрушені в просторі, тому э. д. з. провідників різних пазів будуть зрушені (для сусідніх полюсів)
![]()
Мал. 16. Секції з пол-
ным кроком.
Зірка пазових э. д. з. (для 2р = 4, z =18)
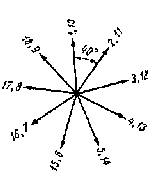

Мал. 17. Схема, зірка э. д. з. пазів і векторна діаграма э. д. з. секції обмотки.
Схема Вектори обертаються з кутовою швидкістю ( = 2?f = 2?pn
Їх проекції на нерухому вісь часу (вертикаль) – це миттєве значення э. д. з. Э. д. з. у провідниках двох сторін секції зрушені на кут
?с=у1?;
Приймаємо у1=4, тоді ?с=4?40?=160?.
На кут ?с=160? зрушені э. д. з. у провідниках 1 і 5 секцій. Означає э. д. з. секції Ївши буде рівна – див. векторну діаграму. Зірка э. д. з. секцій аналогічна зірці пазових э. д. з.
Застосування векторних діаграм буде розглянуто нижче.
Проста петлева обмотка
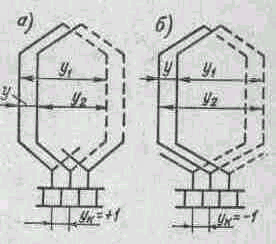
у1 –первый частковий крок, у2- другий частковий крок
у = у1+ у2 - результуючий крок.
Мал. 18. Секції неперехрещеній (а)
і перехрещеною (б) простій пет-
лівої обмотки.
Оскільки у2 вважається від кінцевого провідника секції до початкового, то крок у2 в петлевій обмотці негативний.
ук – крок по колектору ук =у
Ці залежності справедливі для всіх типів обмоток.
Для простий петлевої обмотки
у = ук = ± 1
Знак + відповідає випадку ук < у1 - неперехрещені обмотки, мінус - ук > у1 - перехрещені обмотки (витрата міді тут більше).
Складна петлева обмотка
Складну петлеву або багатоходову обмотку можна розглядати як поєднання декількох простих петлевих обмоток. Таку обмотку називають також складною паралельною; щітки в такій обмотці мають бути по ширині не менше m колекторних ділень (m – кількість простих петлевих обмоток в складній). Кількість паралельних гілок складної петлевої обмотки
2а = 2рm.
Проста хвильова обмотка
Загальні положення
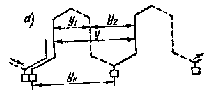
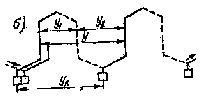
Мал. 19. Неперехрещена (а) і перехрещена (б) проста хвильова обмотки.
Це також проста послідовна обмотка
Залежність
рук ±1= До
звідки
Крок
у1= у – у2
Кроки у1, у2 близькі до ?, а у до 2?.
Всяка хвильова обмотка має 2а = 2
Оскільки кожна з гілок простий хвильової обмотки проходить під всіма полюсами, та нерівність потоків не викликає нерівності э. д. з. і струмів паралельних гілок і обмотка не потребує зрівняльних з'єднань.
Комбінована обмотка (До)
До – поєднання петлевий і хвильовий (запропонована в 1910г.). Вони (обмотки) розташовані в загальних пазах і приєднані до загального колектора і працюють паралельно. Це жаб'яча обмотка. Кожна обмотка розрахована на половину потужності машини.
Петлеві і хвильові обмотки повинні мати рівні:
число паралельних гілок;
число витків;
перетин провідників.
Вибір типу обмотки
ППО – до Р = 80 ?100 квт, СВО – Р = 150?300 квт, ППО – Р = 100?500 квт.
СПО – в машинах низької напруги (U<50В) на великі струми і крупних машинах нормальної напруги. До – в машинах граничної потужності.
Лекція 5
Основні електромагнітні співвідношення
Э. д. з. якорі і електромагнітний момент
Э. д. з .якоря. Хай у1 =? і щітки встановлені на нейтрали. Тоді э. д. з. для N/2p провідників під одним полюсом треба підсумувати і помножити на 2р/2а
де В?к – значення індукції впродовж полюсного ділення.
При великому значенні N/2p
![]() ,
де
,
де
Окружна швидкість
v = 2p·?·n
Після підстановки отримаємо або де
Якщо ( = 2?n отримаємо, де
Мал. 20. визначення э. д. з. якоря і електромагнітного моменту.
Еа пропорційна величині основного магнітного потоку і швидкості обертання і не залежить від форми кривої розподілу індукції в повітряному зазорі.
Електромагнітний момент і електромагнітна потужність.
При колишніх припущеннях, що і при визначенні Еа,, електромагнітний момент
Підставимо сюди .
Тоді .
![]() ,
де
,
де
У системі СІ момент в Н·м, якщо в кгс·м, треба результат розділити на 9,81.
Цю залежність можна представити
![]() ,
,
тобто момент пропорційний потоку всіх полюсів і струму всіх провідників якоря .
Електромагнітна потужність
![]() .
.
Основні електромагнітні навантаження і машинна постійна.
Електромагнітні навантаження.
Всі величини відносяться до номінального режиму. Найважливішими електромагнітними навантаженнями, що визначають ступінь використання матеріалів і розміри машини при заданій номінальній потужності, є магнітна індукція в повітряному зазорі В? і лінійне струмове навантаження Аа. Аа є загальною величиною струму якоря на одиницю довжини кола якоря. Для МПТ
![]()
У малих МПТ матеріал використаний гірше, ніж у великих
Da = 10 см Аа = 100 ? 150 а/см
Da = 300 см Аа = 450 ? 600 а/см
Величина Аа і щільність струму обмежуються умовами охолоджування машини.
Втрати потужності в одиниці об'єму провідників обмотки якоря – ?ja2 (? – питомий опір).
Перетин провідників обмотки якоря на одиницю кола якоря
Sa1 = Aa / ja
Втрати в обмотці якоря на одиницю поверхні якоря
Pa1 = Sa1?j2a = ?Aaja
Чим більше Pa1, тим гірше умови охолоджування. Величина ja також належить до основних електромеханічних навантажень
D = 10 см, ja ? 10 а/мм2
D = 300 см, ja = 4.0 ? 5.5 а/мм2.
Середня дотична сила (Fк) – діє на одиницю поверхні якоря
Fк = ?бBбАа,
де ?б – коефіцієнт полюсної дуги, що враховує, що Bб діє в межах полюсного ділення тільки впродовж дуги ?б?.
?би = 0.6 ? 0.75 (з додатковим полюсом) ?б = вб/?
?би = 0.7 ? 0.85 (без додаткового полюса)
Приклад: ?б = 0.75; Bб = 0.8 mл; Аа = 5·104 а/м
при цьому Fк = 0.75·0,8·5·104 = 3·104 Н/м2 = 3·103 кгс/м2 = 0.3 кгс/см2.
Це реально досяжні електромеханічні зусилля в МПТ.
Машинна постійна Арнольда. Вираз для електромеханічного моменту отримаємо, якщо помножимо Fк на площу поверхні якоря ?Dalб і на плече Da/2
![]()
Залежність Рем від геометричних розмірів машини отримаємо
Рем = Мем ? = Мем·2?n = ?2?бD2alбВбАаn
Звідси визначаємо машинну постійну Арнольда
 ,
,
де величина n/Pэм пропорційна об'єму якоря на одиницю електромеханічного моменту і визначає ?б, Вб, Аа.
Вивід – чим вище електромагнітні навантаження, тим менше розміри і вартість машини при заданій потужності і швидкості обертання.
Геометричні розміри машини визначає безпосередньо не потужність її, а Мем і при даних розмірах потужність пропорційна швидкості обертання. Таким чином, при заданій потужності, машини з великою швидкістю обертання менше по розмірах, легше по вазі, дешевше.
Мал. 21. Залежності машинною постійною Арнольда Са і діаметру якоря Da від Рем/nн для машин постійного струму.
Логарифмічний масштаб. Для машин змінного струму те ж, але інші коефіцієнти. При проектуванні машини по заданому значенню Рем/n з кри- завивання знаходимо Са, а потім конструктивні параметри.
![]() .
.
Відношення ? = lб/Da впливає на техніко-економічні показники машини. Існують оптимальні значення ?, які встановлюються в результаті техніко-економічних розрахунків і дослідження досвідчених даних.
Вплив геометричних розмірів на техніко-економічних
показники машини.
Розглянемо ряд машин. Хай геометричні розміри різні (відрізняються від кожної в однакове число разів), а щільність струму, магнітна індукція і швидкості обертання однакові. У такому разі можна розглянути залежність потужності, втрат і інших величин від якогось характерного для машини геометричного розміру l (Da або lб).
Якщо проаналізувати залежність для Рем (з урахуванням Аа ~ l) можна укласти, що
Р ~ l4
В той же час об'єм V, вага G, вартість C прямо пропорційна l3 (тут і скрізь l – лінійний розмір)
V ~ G ~ C ~ l3
Тоді G/P ~ C/P ~ 1/l
Т. е. вага машини і її вартість на одиницю потужності зменшиться із збільшенням геометричних розмірів обернено пропорціонально l.
При В = const, j = const, f = const електричні, магнітні і механічні втрати ростуть прямо пропорціонально l3. Сумарні втрати Р? ~ l3 і Р?/Р ~ 1/l.
Втрати на одиницю потужності при збільшенні l і Р зменшуються, а до. п. д. машини збільшується.
Поверхневе охолоджування Sохл ~ l2 і Р?/ Sохл ~ l, тобто величина втрат на одиницю поверхневого охолоджування росте прямо пропорціонально l і тому умови охолоджування в крупних машинах погіршуються .Надо удосконалювати способи охолоджування крупних машин.
Відносна витрата матеріалів і відносна вартість у крупних машин менші, а до. п. д. вище, ніж у малих машин. При збереженні геометричних розмірів і електромеханічних навантажень – вага, вартість і втрати на одиницю потужності із збільшенням швидкості обертання зменшуються. Вигідні – крупні і швидкохідні машини.
Лекція 6
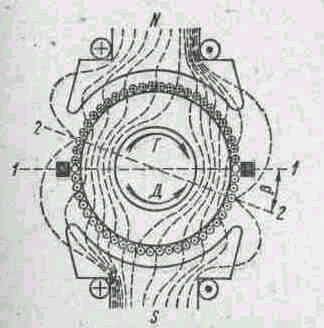
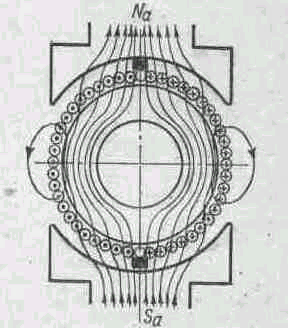
Магнітне поле машини при навантаженні.
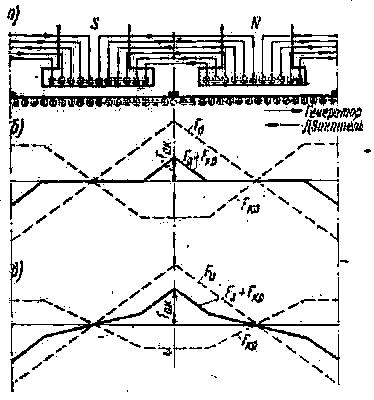
Реакція якоря і її види. Явище реакції якоря.
Магнітне поле індуктора (а) при Ia = 0 і якорі (б) при iв = 0 (це поперечна реакція якоря).
в) – результуюче магнітне поле.
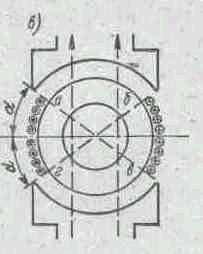
г) – поле подовжньої реакції якоря (при зрушенні геометричної нейтрали на 90?). Це поле залежно від напряму струму якоря намагнічує або розмагнічує збудження і немає його взаємодії з полем Мал. 22. Магнітне поле індуктора (а) і якоря (б). збудження. Еа і
моменти дорівнюють нулю.
.
г)
в)
Мал. 23. результуюче магнітне Мал. 24. Поле подовжньої
поле при установці щіток на гео- реакції якоря.
метричній нейтрали.
Загальний випадок реакції якоря.
Зазвичай щітки встановлюються на нейтрали, але можуть бути зрушені на кут
0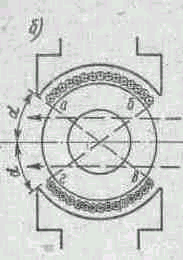
 < ? < 90?.
< ? < 90?.
Мал. 25. Розкладання н. з. якорі при зрушенні щіток з нейтрали (а) на поперечну (б) і подовжню (в).
При цьому розбиваємо на симетричні сектори.
При повороті щіток генератора у напрямі обертання і щіток двигуна проти обертання виникає розмагнічуюча подовжня реакція якоря, що викликається зменшення потоку полюсів. При зрушенні щіток у зворотному напрямі виникає подовжня реакція якоря, що намагнічує, викликає збільшення потоку полюсів.
Вплив реакції якоря на магнітний потік машини.
Н. з. поперечній реакції якоря.
Допущення: 1) якір не має пазів, але їх вплив врахований введенням еквівалентного повітряного зазору ?? = До??; 2) провідники якоря розподілені рівномірно по колу якоря.
Щітки встановлені на нейтрали (а). Н.с. поперечній реакції якоря (б), результуюча індукція і результуюча індукція з урахуванням насичення (в)
Мал. 26. Магнітне поле машини за наявності поперечної реакції якоря. Застосуємо закон повного струму
Якщо припустити, що в сталі ?с = ? і Н = 0, а в повітряному зазорі Наqx = const. Тоді замість інтеграла
2 Наqx?? = 2Ааx
Таким чином
або
Baqx = ?xFaqx, де ?x = ?0/??
?x – магнітна провідність зазору на одиницю площі.
Н. з. поперечній реакції
Faqx = Aax.
Максимальне значення Faqx на лінії геометричної нейтрали
![]() ,
,
а біля краю полюсного наконечника
![]()
Розмагнічуюча дія поперечної реакції якоря.
При ?x = const крива Вaqx повинна повторювати криву Faqx, але в междуполюсном просторі ?x зменшується і на малюнку показана крива Вaqx = f(x). результуюче поле, результуюче поле з урахуванням насичення.
Під впливом насичення поперечна реакція якоря завжди викликає деяке зменшення потоку полюсів, тобто поперечна реакція діє розмагнічуючим чином.
У машинах до 40 кВт при номінальному навантаженні під впливом реакції якоря можлива зміна напряму поля під одним краєм полюса. Щоб цього не було в могутніх машинах зазор у краю полюса роблять більше. Це також покращує комутацію, оскільки розподіл індукції наближається до синусоїдального.
Кількісний облік поперечної реакції якоря.
Насичення полюсних наконечників і тіла якоря невелике. Тому враховують лише насичення зубців. При цьому будують перехідну магнітну характеристику машини F?z = F? + Fz (це при холостому ході).
При навантаженні машини на осі полюса діє та ж н.с. F?z, а при зсуві від осі Fва = F?z + Faqx = F?z + Aax.
Відкладемо по абсцисі ±Faqb. Відрізок вг пропорційний ширині полюсного наконечника. Площа вдбeгав – пропорційна потоку полюса при навантаженні. Площа вжзг – потік полюса при холостому ході. Площа без – збільшення потоку під однією половиною полюса, а площа джб – зменшення потоку під інший.
Мал. 27. Визначення розмагнічуючої дії поперечної реакції якоря.
Різницю площ цих трикутників визначає зменшення потоку полюса під впливом поперечної реакції якоря. Замінимо площу вдбегав рівновеликою площею (прямокутною) вилг. Тоді ак – середня індукція В?н у зазорі при навантаженні, а бк – зменшення середньої індукції при навантаженні –?В?. Тоді відрізок ма - ?Fqb – н. з. розмагнічуюча реакція якоря. Збільшенням н. з. збудження можна компенсувати розмагнічуючий вплив реакції якоря.
Якщо переміщати крапку а вліво або управо – вплив поперечної реакції за різних умов насичення. Внизу на малюнку це показано ?Ф?. Підрахунок площ криволінійних трикутників скрутний. Запропоновані різні методи визначення ?Ф? і ?Fqb (наближені).
Мал. 28. Визначення розмагнічуючої дії поперечної реакції якоря.
Метод Касьянова в.Т.
Проводимо прямі д?б і бе?, так, щоб були рівні площі трикутників
?Sждб = ?Sжд?б, ?Sбез = ? Sбе?з
Продовжуємо лінію бе? до б. Тоді ?Ф? визначається площею бид? і
![]()
Звідси знаходимо ?Ф? і потім ?Fqb. Є метод Петрова Р. Н., який виходить з визначення площі фігур, обмежених кривими параболічного характеру, по формулі Симпсона.
Напруга між колекторними пластинами і
компенсаційна обмотка.
Напруга між колекторними пластинами.
Небажане явище від поперечної реакції якоря – збільшення напруги між колекторними пластинами унаслідок спотворення поля.
При холостому ході максимальна напруга між сусідніми пластинами
Uк = 2В?wсl?va (для простий петлевої обмотки)
wс – число витків секції.
При навантаженні під одним краєм полюса буде Вмакс
Uк.макс= 2Вмаксwсl?va
Отже
![]()
Середня напруга між колекторними пластинами
Uк.ср = 2В?срwсl?va =2?бВ?wсl?va
і
![]()
Зазвичай вибирають таку кількість пластин, щоб між сусідніми була напруга
![]()
не більше 18 – 20 ст.
![]()
Uк.макс( 30 ( 50 в (щоб не було дуги).
Підвищення Uк.макс може відбутися унаслідок збільшення В(макс під дією реакції якоря (перевантаження машини) або зменшення В( (регулювання швидкості ослабленням потоку). Зазор вибирають так, щоб при номінальному режимі навантаження індукція під краєм полюса не міняла свого напряму (“перекидання” поля). Для цього необхідно
![]()
При Da = 10 ( 50 см ( = 0,0009Da.
Компенсаційна обмотка
Ефективним засобом боротьби із спотворенням кривої поля і збільшенням напруги між колекторними пластинами є застосування компенсаційної обмотки (к.о.).
К.о. розміщується в пазах в полюсних наконечниках так, щоб напрями струмів в к.о. і якорі були протилежні в межах кожного полюсного ділення.
 Якщо Аа = Ак.о., той
вплив поперечної реакції якоря усувається.
Ці обмотки сполучені послідовно. Не
завжди можливе дотримання Аа = Ак.о .
Якщо Аа = Ак.о., той
вплив поперечної реакції якоря усувається.
Ці обмотки сполучені послідовно. Не
завжди можливе дотримання Аа = Ак.о .
Рівність лінійних навантажень к.о. і якорі.
Нерівність лінійних навантажень к.о. і якорі.
Мал. 29. Розташування компенсаційної обмотки (а) і
діаграми н. з. якоря, компенсаційної обмотки ре-
зультирующей н. з. при рівності (б) і нерівності (в)
лінійних навантажень якоря і компенсаційної обмотки.
Максимальне значення н.с. поперечній реакції якоря в нейтральній зоні (при Аа ( Ак.о )
![]()
За наявності к.о. величини ( мінімально допустима за механічними умовами.
К.о. зазвичай застосовується в машинах могутніх і швидкохідних Uн ( 400 ( 450 в, Рн ( 80 (100 квт, що піддаються перегріву більше 20% з утрудненою комутацією(реактивна э.д.с.( 5 (7 в).
Лекція 7
Комутація
Природа щіткового контакту
Комутація – процес перемикання секцій обмотки з однієї паралельної гілки в іншу і зміни напряму струму в них на зворотне.
Передача струму від щітки до колектора здійснюється через: 1) механічний контакт між щіткою і колектором; 2) частинки мідного і графітного пилу; 3) іонізовані щілини між щіткою і колектором.
Зони: 1) безпосереднього контакту; 2) пилового контакту; 3) іонній провідності.
При механічному контакті мають місце точкові контакти.
Щільність струму – тисячі ампер на квадратний міліметр. Вони непостійні. Точки безпосереднього і пилоподібного контакту розжарюються. При цьому виникає іонна провідність струму.
Електроліз. В повітрі є волога. При проходженні струму через щітковий контакт виникає явище електролізу. В результаті на колекторі виникає блискуча плівка, звана політурою, яка збільшує перехідний опір щіткового контакту і покращує комутацію.
Вольт-амперні характеристики щіток.
Питомий перехідний опір
![]()
На кривій 1 краще комутація.
Мал. 30. Вольт-амперні харак-
теристики щіток.
Іскріння на колекторі.
Важливо, щоб комутація відбувалася без сильного іскріння – це забезпечує тривалу працездатність машини.
Причини іскріння – механічні і електромагнітні.
Механічні – порушення контакту (нерівність колектора, погана прошлифовка, бій колектора, заїдання або вібрація щіток).
Електромагнітні – пов'язані з характером протікання електромагнітних процесів в комутованих секціях.
Ступінь іскріння. Якість комутації згодна ГОСТ 183-66 оцінюється ступенем іскріння (класом комутації) під збігаючим краєм щітки. Ступені іскріння 1,, допускаються при будь-яких режимах роботи. Буває клас комутації 2 і 3 (це з почорнінням колектора).
Потенційне іскріння. Іноді між пластинами, вільними від щіток виникає іскріння, – це потенційне іскріння. Його причини – накопичення вугільного пилу або збільшення напруги між пластинами. Може перейти в круговий вогонь, що небезпечно.
Круговий огнь є коротким замиканням якоря через електричну дугу на поверхні колектора. Круговий вогонь виникає при сильному розладі комутації. Розповсюдження вогню відбувається шляхом повторних запалень дуги. Перша дуга гасне, але іонізує повітря. Наступна виникає легше.
Круговий вогонь виникає при великих поштовху струму якоря при перевантаженні. Дієва міра – застосування компенсаційної обмотки або швидкодіючих вимикачів.
Іноді ставлять між щітками ізоляційні бар'єри.
Мал. 31. Розповсюдження кругового вогню по колектору.
Процес комутації.
Період комутації Тк – час, протягом якого секція замкнута накоротко щіткою і комутується.
 Для простий
петлевої обмотки
Для простий
петлевої обмотки
![]()
![]() -
колекторне ділення
-
колекторне ділення
![]() -
коефіцієнт щіткового перекриття.
-
коефіцієнт щіткового перекриття.
![]()
Мал. 32. Визначення періоду комутації.
![]()
Для хвильової обмотки
![]() ,
якщо,, то
,
якщо,, то
![]() -
це загальна формула для будь-якої
обмотки.
-
це загальна формула для будь-якої
обмотки.
Для петлевої .
Приклад n = 1500 об/мин = 25 об/с; До = 100; ?к = 2.5.
![]() з.
з.
Рівняння комутації.
Складемо друге рівняння Кирхгофа
де rc – секція, rn -“петушок”, rщ1, rщ2 щітковий контакт.
Послідовні моменти комутації секції.
Мал. 33. Послідовні моменти ком-
мутації секції.
Перше рівняння Кирхгофа (вузли)
![]() ;
;
![]() .
.
Наближене рішення. Підставимо i1 і i2 з рівнянь, отримаємо
![]() .
.
Перший член цього виразу є основним струмом комутації секції, а другий член – додатковий струм комутації.
Комутація опором, прямолінійна комутація.
Хай і при .
Якщо вважати, що rщ1, rщ2 назад пропорційні контактним площам S1 і S2. При цьому
![]() .
.
Ця залежність лінійна, тому комутацію називають прямолінійною. При такій комутації щільність струму під всією щіткою незмінна. Це теоретично ідеальний випадок.
jщ1 = jщ2 = const.
Мал. 34. Прямолінійна і криволінійна
комутація опором.
Сповільнена і прискорена комутація.
При діє додатковий струм
![]()
![]() .
.
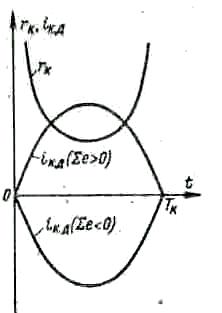
Мал. 35. Додатковий струм комутації. Мал. 36. Сповільнена (а) і прискорена (б) комутація.
Іскріння під збігаючим краєм щітки (i1). Під набігаючим краєм щітки струм (i2) більш ніж під тим, що збігає (i1), але іскріння під набігаючим краєм все одно менше. А під збігаючим краєм щітки іскріння невелике. Це сприятливі умови комутації. Тому завжди прагнуть до прискореної комутації.
Електрорушійні сили в комутованій секції.
Ці э. д. з. роблять великий вплив на комутацію.
Э. д. з. самоіндукції.
![]()
Оскільки струм змінюється від ia до –ia за Tк, то і (уповільнює комутацію).
Э. д. з. взаємній індукції.
Одночасно з даною секцією в машині комутується і інші секції (якщо вони розташовані в загальних пазах – зв'язок сильний) і
![]()
де Мn – взаємна індукція даної секції з одночасно комутованою nой секцією іn –ток nой секції. їм також >0 (уповільнює комутацію).
Обидві (еl і їм) э. д. з. – реактивні
еr = el + їм
Э. д. з. від поля поперечної реакції якоря
еаq визначена (по знаку) за правилом правої руки має той же знак, що еr і також уповільнює комутацію
Э. д. з. від зовнішнього поля і комутуюча э. д. з.
У загальному випадку в зоні комутованих секцій існує зовнішнє (по відношенню до якоря) поле, що індукує в секції э. д. з. із знаком, залежним від напряму поля. Поле реакції якоря і зовнішнє поле індуктора (наприклад додаткових полюсів) утворюють в цій зоні що так зване комутує . поле, яке індукує комутуючу э. д. з.
теньк = 2Вкwcl?va
Мал. 37. Визначення э. д. з., від поля реакції якоря
Прагнуть, щоб теньк компенсувала і була навіть більше еr для поліпшення комутації. Для цього комутуюче поле повинне мати напрям, протилежний напряму поля реакції якоря.
Трансформаторна э. д. з.
Якщо потік головних полюсів змінюється в часі, то в секції, розташованій в нейтральній зоні (у комутованій) індукується э. д. з. трансформації (пульсації)
![]()
У МПТ етр виникає в особливих умовах, наприклад в несталих режимах.
Способи поліпшення комутації
У теорії комутації розглядаються дві э. д. з. – реактивна еr секції і що комутує теньк. Для якнайкращих умов ці дві э. д. з. мають бути близькі по величині (теньк > еr – прискорена комутація). для цього комутуюче поле має бути направлене проти поля реакції якоря.
Додаткові полюсы
Додаткові полюсы встановлюють між головними і кріпляться до ярма. Додаткові полюсы створюють комутуюче поле Fдп, направлене проти поля реакції якоря Faq. Обмотка додаткових полюсів сполучена послідовно з обмоткою якоря. У загальному випадку за наявності компенсаційної обмотки Fдп + Fko >Faq.
При комутації створюються радіоперешкоди з частотою 1-3 кГц. Для їх придушення ставлять фільтри.
Мал. 38. Розташування і поляр-
ность додаткових полюсів.
Мал. 39. Придушення радіоперешкод.
Поліпшення комутації шляхом зрушення щіток
У генераторі щітки необхідно повернути у бік обертання, а в двигуні – навпаки. При цьому в зоні комутації починає діяти поле головних полюсів, що створює теньк. Установку щіток проводять на око по мінімуму іскріння.
Зменшення реактивної э. д. з.
Застосування спеціальних обмоток (укорочений крок і ступінчаста обмотка). У петлевих обмотках сприятливо діють зрівнювачі.
Збільшення швидкості комутованої секції.
Істотним чинником є підбір щіток з належними характеристиками.
Поліпшення комутації при перехідних режимах і пульсуючому струмі (живлення від ТП)
Тут погіршує умови наявність трансформаторної э. д. з. Ефективними заходами є застосування листової електротехнічної сталі для додаткових полюсів ( від вихрових струмів) і застосування компенсаційної обмотки.
Втрати г и к. п. д. електричних машин
Загальні положення
Частина потужності при роботі втрачається – така потужність називається втратами.
Втрати в ЕМ підрозділяються на основних і додаткових. Основні: 1) механічні втрати; 2) втрати в сталі; 3) втрати в міді (у обмотках).
Механічні втрати: у підшипниках, тертя щіток об колектор, вентиляційні. Ці втрати в будь-якій ЕМ залежать від швидкості обертання, але не залежать від навантаження.
Магнітні втрати (у сталі): втрати на гістерезис і вихрові струми. До магнітних втрат відносять також ряд додаткових втрат (із-за зубчатої будови якоря).
Втрати в міді: у обмотках рэл = І2r, де r визначається для 75?С класів ізоляції А, В, Е і 115?С для F,Н.
Додаткові втрати.
Вони визначаються вторинними явищами при навантаженні машини. Їх називають також додатковими втратами при навантаженні.
Одна частина додаткових втрат викликається нерівномірним розподілом магнітного потоку при дії реакції якоря (у одному місці потік збільшується, в іншому – зменшується).
Інша частина додаткових втрат викликається комутацією. Є і інші причини зухвалі додаткові втрати на вихрові струми в бандажі і тертя ЕМ.
Додаткові втрати не пов'язані безпосередньо з електричними процесами за рахунок механічної потужності на валу ЕМ.
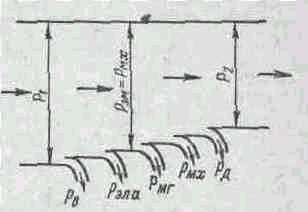
Сумарні або повні втрати Р?
Р? = Рмх + Рмг + Рел + Рд.
Коефіцієнт корисної дії
? = Р2 / Р1
де Р2 – корисна або така, що віддається потужність
Р1 – споживана потужність.
У сучасної машини високий до. п. д.:
10 Вт – 30 – 40%, 10 кВт – 83 – 87%
100 кВт – 88 – 93%, 1000 кВт – 92 – 96%.
Прямий і непрямий метод визначення ?.
Прямій: виміри Р2 і Р1 неточно і складно
можливі великі помилки.
Непрямий: завмер експериментально Р?
Р2 = Р1 - Р?, тоді
![]()
Мал. 40. Залежність до. п. д. електричної машини від навантаження.
Умови максимуму до. п. д.
Визначення і рівність нулю
d? / dкмг = 0
де - Коефіцієнт навантаження. Дотримується умова
Р0 = кмг2.Р2
Суму втрати можна також виразити так
Р? = Р0 + кмгР1 + кмгР2
![]()
Якщо проектувати ЕМ для максимального ?, то треба дотримувати умову
Р0 + Р2 ? Р? ? const.
Лекція 8.
Нагрівання і охолоджування електричних машин.
Теплопередача в електричних машинах.
Втрати енергії в ЕМ викликають її нагрівання. передача тепла від більш до менш нагрітих частин ЕМ і в навколишнє середовище відбувається шляхом теплопровідності, випромінювання і конвекції.
Нагрівання і охолоджування ідеальне твердого тіла.
У основу аналізу нагрівання і охолоджування ЕМ покладена теорія ідеально твердого тіла.
Рівняння нагрівання
![]() ,
,
де - постійна часу нагрівання, G – маса, З – питома теплоємність, Q – кількість тепла.
Рівняння охолоджування
![]()
Мал. 41. Загальний випадок нагрівання ідеально твердого тіла.
Криві нагрівання і охолоджування приймаються як експоненціальні.
Основні номінальні режими роботи ЕМ і допустимі перевищення температури.
Розрізняють наступні номінальні режими роботи ЕМ, для яких виготовляються ЕМ:
тривалим номінальним режимом називається такий режим роботи при номінальному навантаженні, при якому при незмінній температурі навколишнього середовища температури всіх частин ЕМ досягають сталих значень;
короткочасним номінальним режимом називається такий режим, при якому періоди незмінного номінального навантаження при постійній температурі навколишнього середовища чергуються з періодами відключення ЕМ (при цьому під час роботи не досягається сталої температури, а під час стоянки відбувається повне охолоджування). Згідно ГОСТ 183-66 ЕМ виготовляються на тривалість періоду 15, 30, 60 і 90 мин.
повторно-короткочасним номінальним режимом роботи називається такий режим, при якому періоди незмінного номінального навантаження (робочі періоди) чергуються з періодами відключення (паузи), причому як в робочому періоді так і при паузі ЕМ не досягає сталої температури. Цей режим характеризується ПВ (відношення робочого періоду до тривалості циклу). Передбачається (ГОСТ 183-66) ПВ 15, 25, 40 і 60%.
Допустимі перевищення температури електричних машин.
Температура ЕМ залежить не тільки від навантаження, але і від температури навколишнього середовища ?0.
?эм = ?0 + ?
ГОСТ 183-66 і інші Гости нормують гранично допустиму температуру ?доп, але і фіксують значення максимально допустимої температури навколишнього середовища.
Нагрівання електричних машин при різних режимах роботи.
Нагрівання при тривалому режимі відбувається відповідно до кривої, показаної вище. Величина гранично допустимого значення температури електричної машини не повинна перевищувати допустимого значення по ГОСТ 183-66.
Нагрівання при короткочасному режимі
![]() ,
,
![]() .
.
У цьому режимі можна допустити значення ?? у раз більше, ніж при тривалому режимі . Тому при даних габаритах машин і витраті матеріалів потужності машин з короткочасним режимом роботи більше потужностей машин з тривалим режимом роботи.
Нагрівання при повторно-короткочасному режимі роботи.
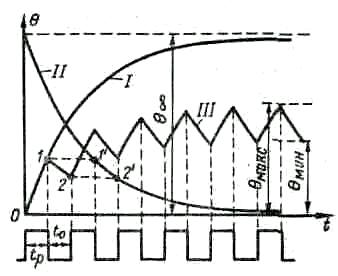
?макс < ?
Побудова кривої нагрівання.
У цьому режимі можна допустити
у ??/?макс бо?льшую потужність.
Мал. 42. Побудова кривої нагрівання при
повторно-короткочасному режимі роботи.
Охолоджування електричних машин.
Бувають наступні конструктивні форми виконання ЕМ: відкриті, захищені, брызгозащищенные, закриті.
Способи охолоджування ЕМ:
машини з природним охолоджуванням;
машини з внутрішньою самовентиляцией;
машини із зовнішньою самовентиляцией;
машини з незалежним охолоджуванням.
Водневе охолоджування. При цьому теплопровідність водню в 7.1 разу вище, ніж у повітря (а також тепловіддача). Тут збільшується термін служби ізоляції, оскільки виключаються окислювальні процеси. При цьому застосовується замкнута система вентиляції.
Генератори постійного струму.
Класифікація генераторів за способом збудження: з незалежним збудженням (збудження харчується від стороннього джерела) і самозбудженням (збудження харчується енергією самого генератора).
Генератори з самозбудженням підрозділяються на генератори паралельного, послідовного і змішаного збудження.
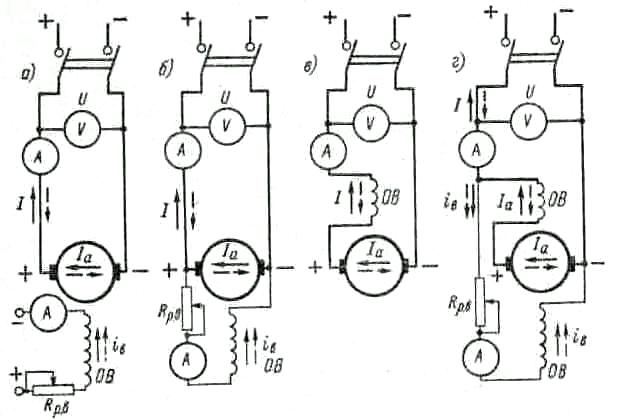
Мал. 43. Схеми генераторів і двигунів незалежного (а), паралельного (б), последователь-
ного (в) і змішаного (г) збудження (суцільні стрілки – напрями струмів в режимі
генератора, штрихові – в режимі двигуна).
Енергетична діаграма генератора.
Р2 = Р1 – рмх – рмг – рд – рэл ? = Рем – рэл ?.
Р1 = рмх + рмг + рд + Рем.
Якщо розділити це рівняння ? = 2?n,
отримаємо рівняння моментів (обертання).
Мв = М0 + Мем
де Мв – момент первинного двигуна
М0 – момент втрат, Мем – електромагнітний момент.
Мал. 44. Енергетична діаграма генера-
тора незалежного збудження.
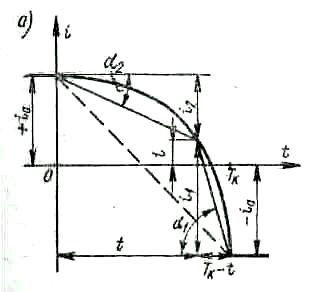
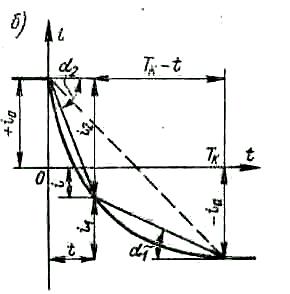
У несталому режимі виникає динамічний момент
![]() ,
,
де j – момент інерції частин генератора, що обертаються.
Динамічний момент відповідає зміні кінетичній енергії мас, що обертаються. При розгоні Мдін > 0 і є гальмуючим. При гальмуванні Мдін < 0 і є рушійним, підтримуючи обертання за рахунок зменшення кінетичної енергії мас, що обертаються.
У загальному випадку при n ? const
Мв = М0 + Мем + Мдін = Мст + Мдін.
Рівняння напруги U на затисках генератора
U = Ea – Iara - 2?Uщ,
де Ea = ceФ?n.
Зазвичай вводять величину Rщ
![]()
і тоді U = Ea – IaRa
де Ra = ra + Rщ
(для вугільних і графітних щіток 2?Uщ = 2 В, а для металлографитных щіток 2?Uщ = 0.6 В).
Установка щіток на нейтраль.
Зазвичай щітки встановлюються на геометричній нейтрали. Установка проводиться індуктивним способом.
При розриві ланцюга збудження відхилення гальванометра має бути мінімальним.
Система відносних одиниць.
У теорії електричних машин і інших областях електротехніки користуються системою відносних одиниць, в якій напруга, струми, потужності і інші величини виражаються в долях базисних значень цих величин (це номінальні їх значення).
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Всі закони і рівняння електротехніки можна записувати у відносних одиницях. Відносні одиниці дозволяють краще судити про значення величин (наприклад, про перевантаження електричної машини і т. п.).
Генератори незалежного збудження.
Властивості генератора аналізуються за допомогою характеристик, які встановлюють залежності між основними величинами, що визначають роботу генератора. Цими величинами є: 1) U – напруга на затисках генератора; 2) iв – струм збудження; 3) Ia – струм якоря; 4) n – швидкість обертання.
Є наступні основні характеристики генератора: 1) холостого ходу (х. х.); 2) короткого замикання (до. з.); 3) зовнішня; 4) регулювальна; 5) навантаження.
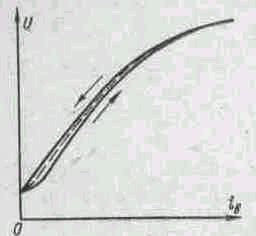
Характеристика х. х. (х. х. х.). при I = 0.
Характеристика знімається експериментально по схемі, показаній на початку розділу “Генератор постійного струму”. Зняття починають з крапки а і йдуть по стрілці. Х. х. х. має вид петлі гістерезису. Штрихова х. х. х. – розрахункова.
Мал. 46. Характеристика холостого ходу
генератора незалежного збудження.
Характеристика до. з. (х. до. з.). при U = 0.
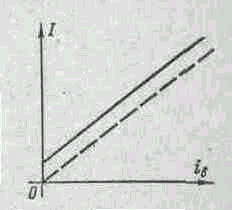
Х. до. з. знімається при до. з. затисків Ea = IaRa. Знімають х. до. з. до 1.25?1.5Iн.
Із-за наявності залишкової магнітної
потоку при iв = 0 I ? 0. У размагничен-
ний машині – штрихова лінія.
Мал. 47. Характеристика короткого замикання
генератора незалежного збудження.
Характеристичний трикутник (х ?). Х ? визначає величину реакції якоря і падіння напруги в ланцюзі якоря.
Х ? можна побудувати за допомогою х. х. х. і будь-який
іншої характеристики (тут х. до. з.). Побудуємо х ?
для Iн (крапка ?). Точка бх відповідає iв для х. до. з.
Потім на характеристиці U (х. х. х.) поставимо крапку
грам, відповідну IнRa. Трикутник бвг і є харак-
теристическим трикутником. Відрізок гв відповідає
реакції якоря, оскільки про – це iв для х. до. з., а од – це iв
для х. х. х. Тоді про – од = дб = iва відповідне
реакції якоря.
Мал. 48. Побудова характеристиче-
ского трикутника у разі размаг-
ничивающей реакції якоря.
При знятті х. к.з. електрична машина ненасыщена і має місце тільки подовжня реакція якоря, викликана зрушенням щіток з нейтрали. При установці щіток на нейтрали дб = 0 і трикутник – пряма лінія.
Зовнішня характеристика генератора (ст. х. р.). при iв = const.
Ст. х. р. визначає залежність U від навантаження I. При
збільшенні I напруга U падає по двох причинах: падіння в якорі IRa і поперечна реакція якоря (при щітках на нейтрали).
Мал. 49. Зовнішня характеристика генератора незалежного збудження.
Ст. х. р. знімають, коли при I = Iн, U = Uн – номінальний режим. Тут має місце номінальна зміна напруги генератора.
![]() .
.
Ст. х. р. можна побудувати за допомогою характеристики х. х. х. і х ? – це завдання студентам (див. також мал. 9-7 на стр.183 по Вольдеку).
Регулювальна характеристика (р. х.). при U = const і n = const і показує як потрібно регулювати iв, щоб при зміні навантаження U = const.
Побудова р. х. по х. х. х. і х ? – це завдання студентам (см мал. 9-9 на стр.185).
Мал. 50. Регулювальна характеристика
генератора незалежного збудження.
Характеристика навантаження (н. х.). при I = const і n = const.
Н. х. схожа з х. х. х. (крива 1), але
проходить нижче за неї (крива 2) із-за
падіння напруги реакції якоря.
Побудова х ? по цих двом
характеристикам – завдання студентам
(див. мал. 9-10 на стор. 185).
Мал. 51. Характеристика навантаження гене-
ратора незалежного збудження.
Якщо рухати х ? паралельно самому собі, отримаємо пунктирну характеристику, яка розходиться з експериментальною (крива 2) із-за насичення.
Генератори паралельного збудження (р. п. ст.).
Самозбудження р. п. ст. відбувається при: 1) наявності залишкового магнітного потоку; 2) правильному підключенні кінців обмотки збудження або правильному напрямі обертання.
Крім того, опір ланцюгу збудження Rв при даній швидкості обертання має бути нижче за деяке критичне значення або швидкість обертання при даному Rв має бути вище за деяку критичну величину.
Достатньо, щоб залишковий потік був 2 – 3 % від номінального. Процес самозбудження – невелика э. д. з. викликає iв, що викликає збільшення э. д. з., потім збільшує iв і так далі Це до тих пір, поки, наприклад, генератор не досягне сталого значення.
Х. х. х. при I = 0 і n = const.
 Може
бути знята тільки в одному квадранті.
Характеристика така ж, як і у генератора
незалежного збудження.
Може
бути знята тільки в одному квадранті.
Характеристика така ж, як і у генератора
незалежного збудження.
Мал. 52. Х. х. х. генератора парал-
лельного збудження.
Х. до. з. при U = 0 і n = const. Може бути знята при живленні обмотки збудження від окремого джерела.
Зовнішня характеристика (ст. х. ). .
1 – ст. х. генератора паралельного
2 – ст. х. генератора
незалежного збудження.
До двох причин зниження U при
навантаженню додається третя – зниження iв.
Мал. 53. Зовнішні характеристики генераторів параллель-
ного (1) і незалежного (2) збудження.
Побудова ст. х. за допомогою х. х. х. і х ? – завдання студентам.
Регулювальна характеристика ( ) і характеристика ( ) навантаження знімаються так само як у генератора незалежного збудження.
Генератори послідовного збудження.
Тут iв = Ia = I при n = const є тільки дві незалежних змінних U, I. Тому такий генератор має тільки одну характеристику – зовнішню .
Мал. 54. Зовнішня характеристика генератора послідовного збудження.
Генератори змішаного збудження.
Такий генератор самовозбуждается так само, як і генератор паралельного збудження і їх х. х. х. аналогічні.
Х. до. з. можна зняти при незалежному живленні паралельної обмотки і зустрічному включенні послідовної обмотки.
Зняття зовнішньої, регулювальної і навантаження характеристик проводиться так само, як у генератора паралельного збудження.
Лекція 9.
Двигуни постійного струму (ДПТ).
ДПТ знайшли широке застосування в промисловості. За способом збудження підрозділяються на двигуни незалежного, паралельного, послідовного збудження.
Схеми двигуна і генератора однакові.
Енергетична діаграма двигуна паралельного збудження.
 Р1
– електрична потужність, потреб-
Р1
– електрична потужність, потреб-
ляемая з мережі;
Рем = Еаia – електромагнітна потужність;
Рмх – механічна потужність;
Р2 – корисна механічна потужність
на валу.
Мал. 55. Енергетична діаграма двигуна
паралельного збудження.
Рівняння моментів, що обертаються.
Електромагнітний момент
![]()
є рушійним, витрачається на урівноваження гальмівних моментів:
1) М0 – моменту, відповідного втратам Рмг, Рд і Рмх, що покривається за рахунок механічної потужності;
2) Мв – моменту навантаження на валу;
3) Мдін – динамічного моменту.
При цьому
![]() .
.
Таким чином
![]()
або
![]() .
.
При сталому режимі роботи
![]() .
.
Далі індекс „эм“ при М буде опущений.
Якщо виразити Р в кВт, а ( через n об/мин, то буде вірна залежність
![]() .
.
Паралельна робота генераторів постійного струму.
При паралельній роботі генератора потрібно дотримати наступні умови:
1) при включенні генераторів на паралельну роботу не повинно виникати значних поштовхів струму;
2) генератори повинні навантажуватися рівномірно, пропорційно їх номінальній потужності.
Для дотримання першої умови треба, щоб:
1) полярності генераторів були однакові;
2) э. д. з. генераторів мають бути рівні.
Рівняння напруги і струму.
У двигунах напрям дії Еа протилежно напряму струму якоря Ia і Еа називають проти э. д. з.
Рівняння напруги для ланцюга якоря
U = Ea + IaRa.
У режимі двигуна U > Ea
![]() ,
,
де Еа = СЕФ?n.
Швидкість обертання і механічні характеристики. Вирішуючи ці рівняння, отримаємо рівняння швидкісної характеристики
![]() .
.
Якщо врахувати, що
М = СМФ?Ia,
то отримаємо рівняння механічної характеристики
![]() .
.
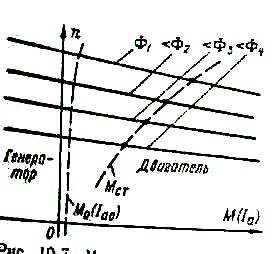
Вид механічної характеристики n = f(M) або M = f(n) при U = const залежить від того, як із зміною навантаження або моменту змінюється потік машини Ф? і різний для двигунів з різними способами збудження. Це ж справедливо і для швидкісних характеристик.
Пуск двигунів постійного струму.
При пуску двигуна необхідно:
1) необхідну величину пускового моменту і умови для досягнення необхідної швидкості обертання;
2) запобігти надмірному пусковому струму.
Можливі три способи пуску:
1) прямий пуск (якір включений на повну напругу мережі);
2) через пускові реостати включений послідовно з якорем;
3) при пониженні напруги якоря.
При прямому пуску великий пусковий струм і він застосовується для двигунів в декілька сотень ватів (Ia ? 4 ? 6 Iн), а tn = 1 ? 2c.
Пуск через реостат
![]() ,
,
у початковий момент пуску Еа = 0 і . Rn підбирається, щоб в початковий момент Ia = (1.4 ? 1.7) Iн.
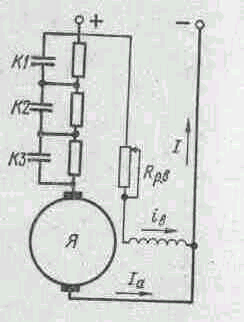
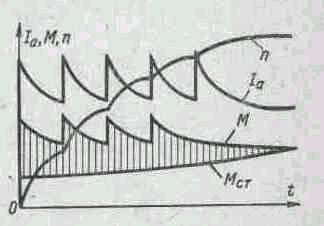
Мал. 56. Схема пуску двигуна паралельного Мал. 57. Залежність Ia, M і n від часу
збудження за допомогою пускових опорів. при пуску двигуна.
Не можна допускати розриву ланцюга збудження – рознесення двигуна. Хороше обмеження струму досягається при пуску від джерела з регульованою напругою. Для реверсу необхідно змінити полярність напруги якоря або струму збудження.
Регулювання швидкості обертання і стійкість роботи двигуна.
Способи регулювання швидкості виходять із залежності :
1) зміна Ф? (тобто iв ) – швидкість збільшується від nн;
2) включення послідовне з якорем реостата, це неекономічно.
шляхом регулювання U (зменшується від nн).
Умови стійкості роботи двигуна.
Під стійкістю роботи двигуна розуміється його здатність повернутися до початкового сталого режиму роботи при малих обуреннях його роботи, коли дія цих обурень припиниться. При нестійкості двигуна нормальна його робота неможлива, і зазвичай відбувається аварія.
![]()
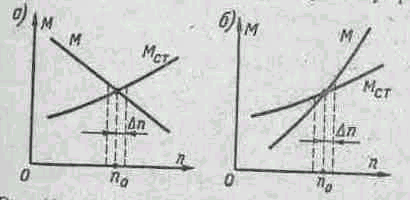
Мал. 58. Стійкий (а) і нестійкий (б)
режими роботи двигуна.
Поведінка двигуна при сталому режимі роботи і переходах до нового режиму роботи цілком визначається рівняннями рівноваги моментів
Мем = Мст + Мдін і напруга ланцюга якоря U = Ea + IaRa.
Двигуни паралельного збудження.
Швидкісна характеристика визначає вектор, а механічна
![]() .
.
Якщо немає додаткових опорів, то ці характеристики називаються природними.
Мал. 59. Природна швидкісна і механічна характеристика двигуна паралельного збудження
Жорсткі характеристики (5 ? 8 %).
Регулювання швидкості ослабленням магнітного потоку. (зазвичай 1 : 2, але буває до 1 : 8).
Мал. 60. Механічні і швидкісні характеристики двигуна паралельного збудження при різних потоках збудження.
Регулювання швидкості опором в ланцюзі якоря.
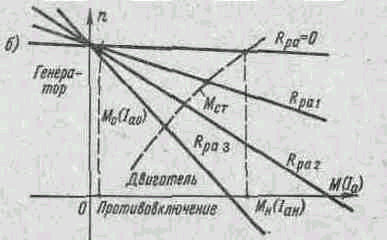
Мал. 61. Механічні і швидкісні характеристики регулювання
швидкості обертання двигуна паралельного збудження з допомогою
опору в ланцюзі якоря.
Регулювання швидкості зміною напруги на якорі: система генератор – двигун (агрегат Леонарда) – намалювати вентильний привід, імпульсне регулювання.
Робочі характеристики двигуна.
Мал. 62. Робочі характеристики двигуна паралельного збудження.
Двигуни послідовного збудження (ДПВ).
Для ДПВ Ф? = Кфi, iв = Ia = I.
![]() ,
,
![]() ,
,
![]() .
.
Швидкісна характеристика – гіперболічна. Так ДПВ М ~ I2, то вони розвивають значно більший пусковий момент, чим двигун паралельного збудження.
Мал. 63. природна швидкісна характеристика двигуна послідовного збудження.
У ДПВ n ~ U/I ~ U/ і Р2 = 2?nM ~, тобто при зміні М в широких межах потужність змінюється в менших межах, чим у двигунів паралельного збудження. Для ДПВ. менш небезпечні перевантаження по моменту. Вони застосовуються для електричної тяги – електровоз, метро і тому подібне
Схеми регулювання швидкості ДПВ
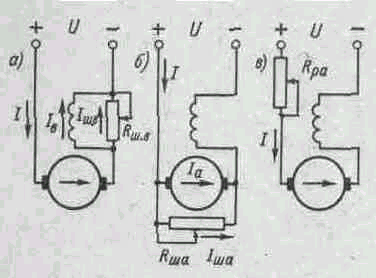
Мал. 64. Схеми регулювання швидкості Мал. 65. Механічні характери-
обертання ДПВ за допомогою шунтирова- стики ДПВ при різних способах
ния обмотки збудження (а), шунтиро- регулювання швидкості враще-
вания якорі (б) і включення сопротивле- ния.
ния в ланцюг якоря (в).
Можливе паралельне і послідовне включення ДПВ
Двигуни змішаного збудження (ДСВ).
1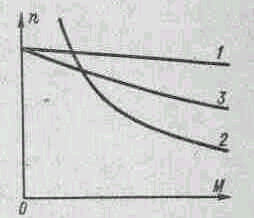 – паралельне збудження;
– паралельне збудження;
2 – змішане збудження при согласован-
ном включенні послідовно обмоток;
3 – послідовне збудження.
Мал. 66. Природні механічні характеристики
двигунів паралельного (1), послідовного (2)
і змішаного збудження з приголосним включенням
послідовної обмотки (3).
ДСВ застосовується в умовах, коли потрібний великий пусковий момент, швидке прискорення при пуску і допустимі значні зміни швидкості обертання при зміні навантаження.
Нормальні машини постійного струму.
Машини масового і серійного виробництва – у вигляді серій. Основна – серія П.(0.3 – 200 кВт). Є унікальні машини. Сказати про вдосконалення – высокомоментные двигуни.
Спеціальні типи машин постійного струму.
Трьохобмотувальні генератори, генератори поперечного поля (для живлення електричних вагонів залізниці), генератори уніполярних імпульсів, уніполярні генератори (великий струм, низька напруга), тахогенераторы, ЕМУ, вентильні двигуни, м. р. д. машини.
Література
Вольдек А. І. Електрічеськие машини, "Енергія" Ленінградське відділення, 1974.
2. Костенко М. П., Піотровський Л. М. Електрічеськие машини ч. 1 Машини по- стоянного струму. Трансформатори. Л., "Енергія", 1972, 543 з мул. ч. 2. Машини змінного струму. Л., "Енергія", 1973, 648 з
Ріхтер Р. Електрічеськие машини. М – Л., ОНТІ, 1935 (Т1, Т2), 1936 (Т2), (Т4, Т5) – 1961, М – Л., ТЕН.
Кацман М. М. Електричні машини. Москва, вища школа, 1990
Лекція № 10 Трансформатори. Основні відомості про трансформатори.
Трансформатор – електромагнітний апарат, призначений для перетворення змінного струму однієї напруги в змінний струм іншої напруги тієї ж частоти.
На малюнку показана схема трансформатора і прийняті такі позначення:
![]() -
навантаження;
-
навантаження;
Грам – генератор ~ змінного струму; - напруга, струми, витки первинної і вторинної обмоток. Передача енергії з однієї обмотки в іншу – шляхом эл магнітної індукції. Для посилення эл магнітного зв'язку, обмотки распологаются на замкнутому феромагнітному сердечнику . При частотах вище 100000 Гц – трансформатор без феромагнітного сердечника (повітря) або з феритів.
При підключенні до генератора на напр в обмотці виникає . При підключенні до виникає і встановлюється . Результуючий потік створюється струмами обох обмоток.
Електричні співвідношення в ідеальному трансформаторі:
Ідеальний трансформатор:
Відсутність втрати енергії;
Всі лінії магнітної індукції зчіплюються зі всіма витками і - при цьому магнітний зв'язок повний і коефіцієнт эл магнітного зв'язку обмоток трансформатора рівний
![]() ,
,
де M – взаим індукція;, - власна індукція обмоток.
Э.д.с. обох обмоток при цьому:
![]() ;
;
![]() ;
;
![]() -
амплітуда магнітного потоку трансформатора.
-
амплітуда магнітного потоку трансформатора.
Значення э.д.с, що діє.



![]() ;
;
![]() ;
;
![]() ;
;

для ідеального трансформатора (через відсутність падінь напруги): і



![]() -
коефіцієнт трансформації;
-
коефіцієнт трансформації;
Також для ідеального трансформатора: і

![]() ;
;
Види трансформаторів:
Два обмотувальні і багатообмотувальні;
Однофазниє і трифазні;
Силові і спеціальні;
Силові: масляні і сухі.
Види магнитоприводов:
Стрижньові Броньові

Для трифазної системи використовують три однофазні трансформатори або трифазний трансформатор.
![]() ;
;
А В З
Такий трифазний сердечник запропонований Доліво-добровольським в
1889 р.
Схеми і групи з'єднань обмоток трансформатора.
Обмотки трифазного трансформатора сполучені або в Y, або в ?, або в зигзаг.
Групи з'єднань трансформатора.
Для включення трансформатора на паралельну роботу має значення зрушення фаз між первинною і вторинною напругою. Для характеристики цього зрушення вводиться поняття про групу з'єднань обмоток. При цьому вектори лінійних э.д.с. уподібнюють стрілкам годинного циферблату (обм ВН – хвилинна стрілка і вона завжди на 12, обм НН - годинникова стрілка).
 A
A
 А
ЕА
А
ЕА
 ЕА
х
ЕА
х
X
а Еа Х
Еа
х а
Для однофазних трансформаторів: -6 і -0 – (група 0 група 6).
Якщо узяти трифазний трансформатор з наступними обмотками
Це Y / ( - 11