

1 Исследование механизма рычажного толкателя
1.1 Динамический синтез механизма
1.1.1 Построение отдельных положений механизма
Для более тщательного исследования механизма разбили движение ведущего звена на 12 положений:
![]() (1.1)
(1.1)
Построение всех положений представлено в приложении 1.
1.1.2 Определение скоростей и точек звеньев
![]() (1.2)
(1.2)
![]() =1,9*0,12
=0,228м/с
=1,9*0,12
=0,228м/с
![]()
![]() (1.3)
(1.3)
Для определения скоростей точек и звеньев составили следующие уравнения скоростей:

![]() ,
,
![]() .
.
Построенные планы скоростей представим в приложении 1.
Согласно построенных планов получили:
Рассмотрев треугольник получили:
![]() (1.4)
(1.4)
Из построения нашли значения скоростей точек и звеньев и умножив их на масштабный коэффициент определили их истинное значение.
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
|
VC |
VD |
VF |
Vs1 |
Vs2 |
Vs3 |
Vs4 |
ω2 |
ω3 |
ω4 |
0 |
0,042 |
0,037 |
0,038 |
0,114 |
0,114 |
0,004 |
0,004 |
0,315 |
0,038 |
0,007 |
30 |
0,058 |
0,052 |
0,052 |
0,114 |
0,0,13 0,13 |
0,052 |
0,052 |
0,23 |
0,053 |
0,005 |
60 |
0,163 |
0,16 |
0,14 |
0,114 |
0,196 |
0,148 |
0,148 |
0,13 |
0,15 |
0,023 |
90 |
0,232 |
0,22 |
0,204 |
0,114 |
0,228 |
0,202 |
0,202 |
0,02 |
0,21 |
0,02 |
120 |
0,236 |
0,202 |
0.204 |
0,114 |
0,224 |
0,202 |
0,202 |
0,16 |
0,21 |
0,009 |
150 |
0,128 |
0,116 |
0,112 |
0,114 |
0,156 |
0,128 |
0,128 |
0,26 |
0,11 |
0,017 |
180 |
0,032 |
0,028 |
0,03 |
0,114 |
0,118 |
0,028 |
0,028 |
0,3 |
0,03 |
0,006 |
210 |
0,102 |
0,092 |
0,088 |
0,114 |
0,144 |
0,09 |
0,09 |
0,27 |
0,09 |
0,017 |
240 |
0,194 |
0,175 |
0,17 |
0,114 |
0,202 |
0,17 |
0,17 |
0,17 |
0,18 |
0,017 |
270 |
0,228 |
0,206 |
0,19 |
0,114 |
0,228 |
0,192 |
0,192 |
0,0067 |
0,21 |
0,0057 |
300 |
0,198 |
0,18 |
0,178 |
0,114 |
0,204 |
0,176 |
0,176 |
0,16 |
0,18 |
0,01 |
330 |
0,13 |
0,117 |
0,118 |
0,114 |
0,154 |
0,116 |
0,116 |
0,28 |
0,12 |
0,017 |

Полученные значения скоростей свели в Таблицу 1.1.
Таблица 1.1 Линейные и угловые скорости точек звеньев механизма.
1.1.3 Определение приведенного момента инерции
Для каждого положения механизма приведенный момент инерции находим по формуле:
 ,
(1.5)
,
(1.5)
 (1.6)
(1.6)
где i – номер положения;
mi – масса соответствующего звена;
![]() –
скорость центра тяжести звена;
–
скорость центра тяжести звена;
![]() i
– угловая скорость;
i
– угловая скорость;
![]() – момент
инерции звена;
– момент
инерции звена;
![]() .
.
Полученные данные сводим в таблицу 1.2
Таблица 1.2
φ° |
Jпр, кг·м2 |
0; 360 30 60 90 120 150 180 210 240 270 300 330 |
9,84 9,59 10,23 11,1 11,1 10,13 9,78 9.48 10,6 10,87 10,28 10,23 |
1.1.4 Определение приведенного момента сил сопротивления
Приведенный момент сил сопротивления
![]() ,
(1.7)
,
(1.7)
где
![]() - приведенный момент сил тяжести,
- приведенный момент сил тяжести,
 ,
(1.8)
,
(1.8)
где
![]() – сила тяжести звена;
– сила тяжести звена;
i – номер положения;
![]() –скорость
центра тяжести звена;
–скорость
центра тяжести звена;
cosα – угол между силой тяжести звена и центра тяжести звена.
В нашем случае имеем:
![]()
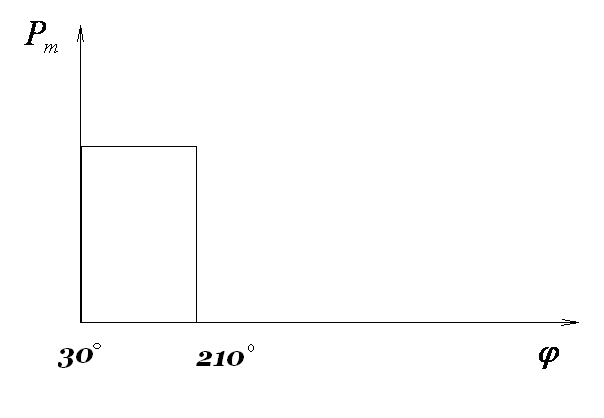
![]() -
момент от нагрузки, значение
-
момент от нагрузки, значение ![]() берем из графика 1
берем из графика 1
![]() ,
(1.9)
,
(1.9)
Г
Полученные данные сводим в таблицу 1.3
Таблица 1.3
φ, град |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
|
22,84 |
23,25 |
15,33 |
4,25 |
-8,8 |
-25,84 |
-26,98 |
-9,95 |
-7,63 |
2,21 |
9,93 |
34,7 |
Н∙м |
0 |
32,84 |
88,42 |
128,84 |
128,84 |
70,75 |
19 |
55,6 |
0 |
0 |
0 |
0 |
|
22,84 |
56,1 |
103,75 |
133,1 |
120,04 |
44,89 |
-8,03 |
45,6 |
-7,63 |
2,21 |
9,93 |
34,7 |
1.1.5 Определение работы сил движущих и сил сопротивления.
![]() (1.10)
(1.10)
В нашем случае имеем:
![]() ,
(1.11)
,
(1.11)
где i – номер положения;
Δφ – приращение угла;
![]() – приведённый
момент сил сопротивления;
– приведённый
момент сил сопротивления;
![]() – работа
сил сопротивления
– работа
сил сопротивления
![]() радиан
радиан
Полагаем, что момент сил движущих есть величина постоянная (const)
![]() (1.12)
(1.12)
![]() (1.13)
(1.13)
где Mд – приведенный момент сил движущих;
Aд – работа сил движущих;
Δφ – изменение угла поворота.
Изменение кинетической энергии определяется по формуле
![]() (1.14)
(1.14)
Значения работы сил сопротивления, работы сил движущих, изменения кинетической энергии для всех положений механизма сводим в таблицу 1.4
Таблица 1.4
Положение J |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
|
0 |
20,6 |
62,4 |
124,34 |
190,54 |
233,67 |
243,31 |
253,13 |
263,1 |
261,7 |
264,73 |
276.26 |
|
0 |
24,3 |
48,6
|
72,9 |
97,2 |
121,5 |
145,3 |
169,6 |
193,9 |
218,3 |
242,3 |
2666 |
|
0 |
3,7 |
-13,8 |
-51,44 |
-93,4 |
-112,7 |
-98,01 |
-83,53 |
-69,2 |
-43,5 |
-22,4 |
-9,7 |
1.1.6 Определение момента инерции маховика
Момент инерции маховика
![]() ,
(1.15)
,
(1.15)
где
![]() – максимальный момент инерции;
– максимальный момент инерции;
 ,
(1.16)
,
(1.16)
где δ – неравномерность хода;
ΔJпр – изменение приведенного момента инерции;
![]() ,
(1.17)
,
(1.17)
![]()
изменение кинетической энергии:
![]() ,
(1.18)
,
(1.18)
![]()
![]()
![]()
Примем радиус маховика за 0,5 м, тогда его масса равна:
![]() (1.19)
(1.19)
1.2 Динамический анализ механизма
1.2.1 Определение истинного закона движения механизма
Для определения истинного закона движения рассмотрим дифференциальное уравнение движения, которое имеет следующий вид:
![]() (1.20)
(1.20)
где
![]() – приведённый момент сил сопротивления;
– приведённый момент сил сопротивления;
![]() – приведённый
момент сил движущих;
– приведённый
момент сил движущих;
![]() –
момент
инерции;
–
момент
инерции;
![]() – изменение
момента инерции от угла поворота.
– изменение
момента инерции от угла поворота.
![]() (1.21)
(1.21)
Полученные значения производной сведём в таблицу 1.5.
Таблица 1.5 Значения производной приведённого момента инерции
Положение |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
Јпрj, Кг*м2
|
-0,48 |
1,22 |
1,66 |
0 |
-1,85 |
0,67 |
-0,57 |
2,14 |
0,52 |
-1,13 |
-0,095 |
-0,75 |
Решается
дифференциальное уравнение методом
последовательных приближений с помощью
начальных условий. В основу решения
положена формула равноускоренного
движения. Полагаем, что в пределах
достаточно малого угла поворота
![]() машина движется равноускоренно. Тогда,
используя начальные условия, получим
машина движется равноускоренно. Тогда,
используя начальные условия, получим
![]()
Зная
![]() ,
определяются
,
определяются
![]()
Зная
![]() определяем
определяем
![]() .
.
Из дифференциального уравнения выражаем εi .
 (1.22)
(1.22)
Зная εi , можно найти ω в следующем положении

Расчет вести до установившегося движения, то есть когда закон движения из цикла в цикл повторяется. Данные для установившегося движения представлены в приложении 1.