

Министерство Образования и Науки РФ
РГРТУ
Кафедра АСУ
Отчет по лабораторной работе №3:
«Анализ точности систем автоматического управления».
Выполнили: студенты гр.035
Ялама В. В.
Перов А. Ю.
Елистратов Д. А.
Проверил: Брянцев
Рязань 2014
Цель работы: изучение типовых установившихся ошибок линейных систем управления, зависимости ошибок от параметров системы, методов достижения инвариантности.
Практическая часть
Собираем модель, представленную ниже.
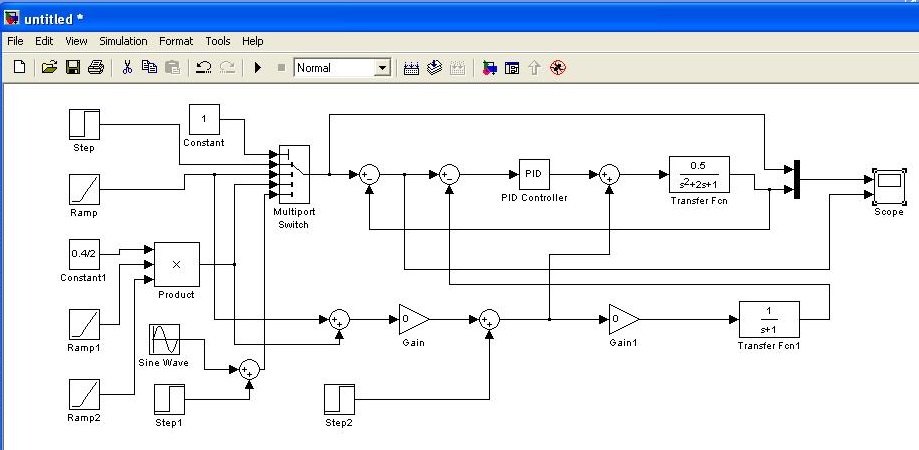
Рисунок 1 – Схема модели
Блок
Multiport Switch
предназначен для коммутации на вход
системы управления одного из четырех
видов задающего воздействия:

Исследуем влияние коэффициента усиления и порядка астатизма (
 и
и
 )
на величину установившейся ошибки
воспроизведения степенных задающих
воздействий.
)
на величину установившейся ошибки
воспроизведения степенных задающих
воздействий.Установим передаточную функцию (ПФ) объекта управления в блоке Transfer Fcn следующего вида
 где
где

W(s)
=

Установим коэффициенты передачи блоков Gain и Gain1 равными нулю. В блоке Step2 зададим параметр Final value=0.
Подаем
на вход системы управления задающее
воздействие
 ,
установив в блоке Constant
единицу, а в блоке Step
следующие численные значения параметров:
,
установив в блоке Constant
единицу, а в блоке Step
следующие численные значения параметров:
- Step time = 0,
- Initial value = 0,
-
Final value
=

Зададим
в блоке PID
Controller
ПФ пропорционального регулятора
 ,
установив
,
установив

Рисунок 2 – Схема модели
При Р = 2
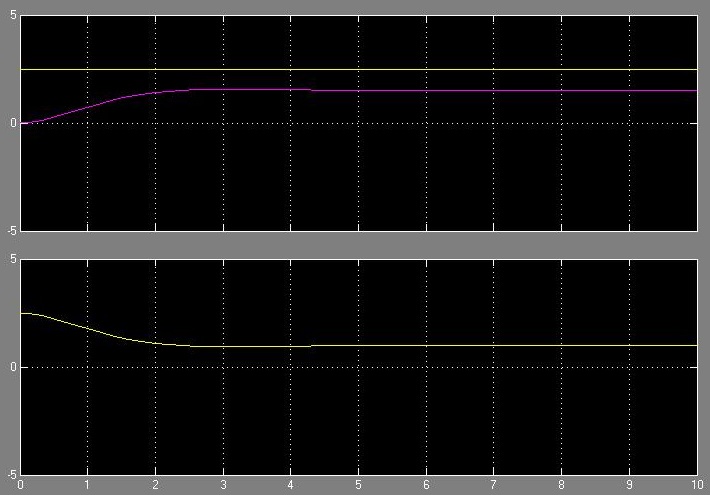
Рисунок 3 – Результаты моделирования при P = 2
Изменяем
величину Р (от 2-18), снимаем зависимость
установившейся ошибки
 где
где
 Измерение значения
Измерение значения
 производится в окне блока Scope
по окончанию переходного процесса на
графике
производится в окне блока Scope
по окончанию переходного процесса на
графике

при Р = 8
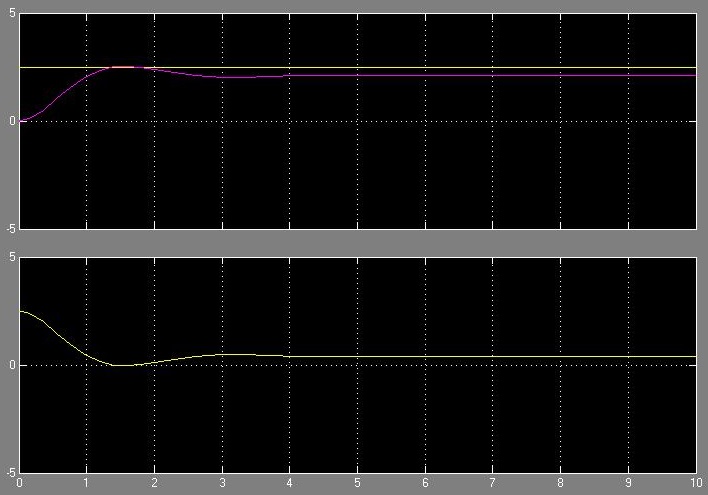
Рисунок 4 – Результаты моделирования при P = 8
При Р = 10
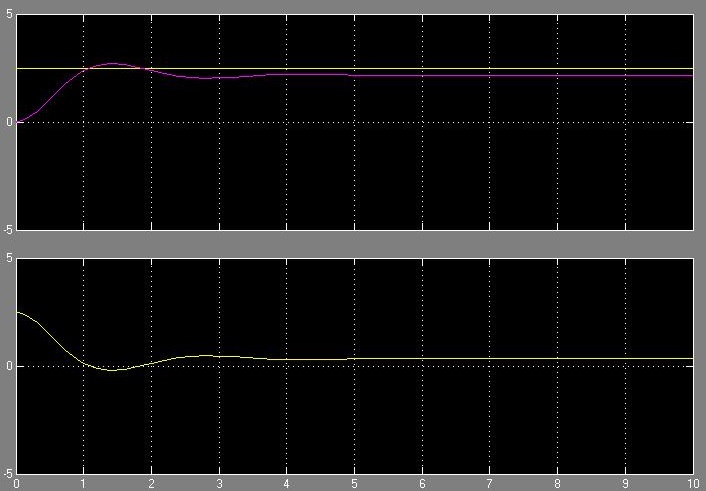
Рисунок 5 – Результаты моделирования при P = 10
При Р = 14
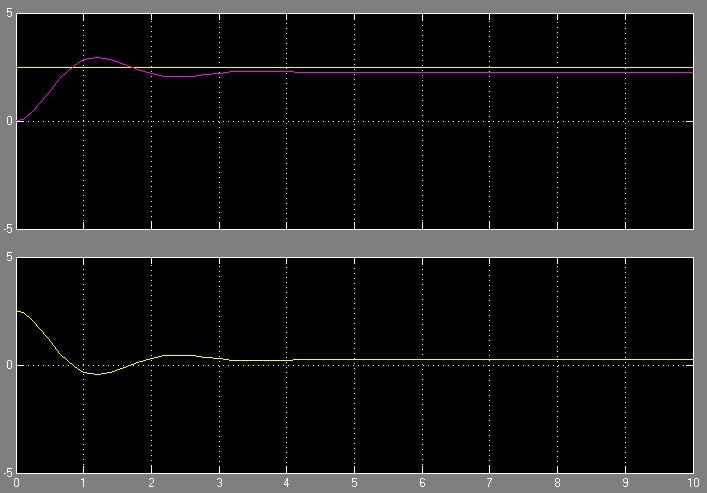
Рисунок 6 – Результаты моделирования при P = 14
При Р = 18
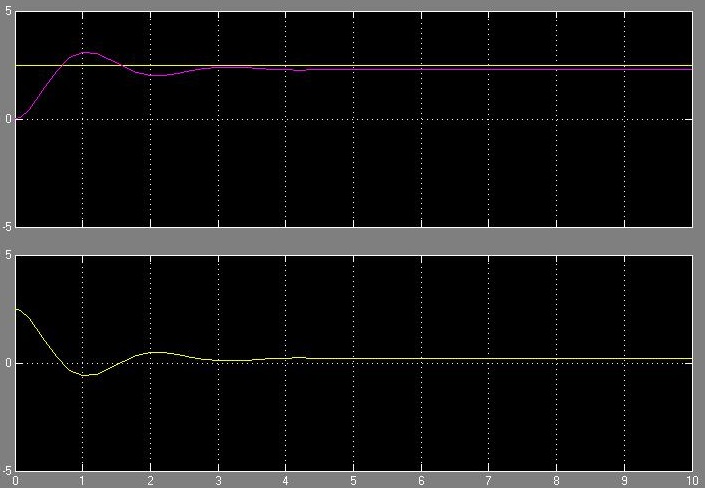
Рисунок 7 – Результаты моделирования при P = 18