

1. Определение и структурная схема электропривода.
Электропривод – это электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением (ГОСТ 16593-79).
Структурная схема электропривода приведена на рис. 1.1.
2. Виды электроприводов.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение или равенство скоростей или нагрузок или положение исполнительных органов рабочих машин. Одной из разновидностей взаимосвязанного электропривода является многодвигательный электропривод.
Многодвигательным электроприводом называется электропривод, обеспечивающий передачу движения от нескольких ЭД на один общий вал (рис.1.6). Примером такого электропривода служит привод цепного конвейера (рис.1.7).
Цепь, приводимая в движение двумя или несколькими двигателями, расположенными вдоль конвейера, является рабочим органом. В данном случае двигатели ЭД1 и ЭД2 имеют вынужденно одинаковую скорость. Взаимосвязанный электропривод широко применяется в различных современных машинах и агрегатах, например, в копировальных, металлорежущих станках и станках с программным управлением, в поточных технологических линиях.
ЭД1
ЭД2


Рис. 1.7. Схема взаимосвязанного электропривода конвейера
Многообразие производственных процессов обуславливает различные виды и характеры движения исполнительных органов машины, следовательно, и электроприводов. По виду движения электроприводы бывают вращательного или поступательного, однонаправленного или реверсивного движения. По характеру управления электропривод может быть нерегулируемым, регулируемым, программно управляемым, следящим и др.
3. Механические характеристики производственных механизмов.
Зависимость между моментом сопротивлений и угловой скоростью, т.е. Мс=f( называют механической характеристикой производственного механизма.
Все механические характеристики производственных механизмов можно разделить на следующие основные группы (рис.1.8):
|
|
Рис.1.8. Механические характеристики производственных механизмов |
Рис.1.9. Меххарактеристики электрических двигателей |
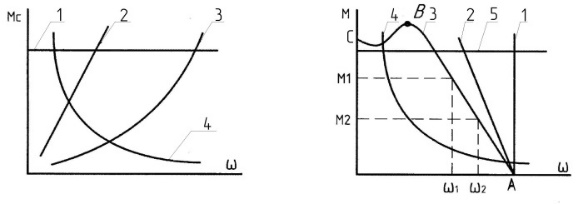
1) механическая характеристика, не зависящая от скорости (прямая 1, рис.1.8). При этом χ=0, Мс не зависит от скорости и является постоянной величиной. Такую характеристику имеют подъемные механизмы (лебедки, краны, тельферы, лифты, кран-балки и др.); кормораздаточные транспортеры (телескопические, ленточные и др.); навозоуборочные транспортеры (кругового движения, штанговые, каретно-скреперные и др.) и другие рабочие машины;
2) линейно - возрастающая механическая характеристика (прямая 2, рис.1.8). При этом χ=1, Мс линейно зависит от скорости , увеличиваясь с ее возрастанием. Такая характеристика свойственна генераторам постоянного тока с независимым возбуждением, работающим как рабочая машина и отдающим энергию на постоянное внешнее сопротивление; глиномялкам и льномялкам под нагрузкой; корнеклубнемойкам и прессам типа ПСМ-5А на холостом ходу и другие рабочие машины;
3) нелинейно - возрастающая (параболическая) механическая характеристика (кривая 3, рис.1.8). Показатель степени χ = 2. Механизмы, обладающие такой характеристикой, иногда называют механизмами с вентиляторным моментом, т.к. у вентиляторов момент сопротивления зависит от квадрата скорости. Кроме вентиляторов, такую характеристику имеют центробежные насосы, сепараторы, молотильные барабаны и др.;
4) нелинейно - падающая механическая характеристика (кривая 4, рис.1.8). В этом случае показатель степени χ –1, Мс изменяется обратно пропорционально скорости. Данной характеристикой обладают некоторые токарные, расточные, фрезерные и другие металлообрабатывающие станки, зерновые ковшовые нории под нагрузкой при постоянной подаче, шнековые транспортеры и другие рабочие машины.
4. Механические характеристики электрических двигателей.
Механической
характеристикой электродвигателя
называется
зависимость между его вращающим моментом
и угловой скоростью, т.е. МД=f(.
Почти у всех электродвигателей скорость
является убывающей функцией момента
двигателя. Однако степень изменения
скорости с изменением момента у разных
двигателей различна и характеризуется
так называемой жесткостью механических
характеристик. Жесткость механической
характеристики электродвигателя
определяется как отношение разности
моментов, развиваемых электродвигателем,
к соответствующей разности угловых
скоростей:
 .
.
Например, у механической характеристики 3 на рис.1.9 жесткость определяется как.
Все механические характеристики электродвигателей можно разделить на следующие основные типы (рис.1.9):
1) абсолютно жесткая механическая характеристика ( - это такая характеристика, при которой скорость с изменением момента остается неизменной. Данной характеристикой обладают синхронные двигатели (прямая 1, рис.1.9);
2) механическая характеристика с коэффициентом жесткости 40...10 - это характеристика, при которой скорость с изменением момента хоть и уменьшается, но в незначительной степени. Такой характеристикой обладают двигатели постоянного тока независимого возбуждения (прямая 2, рис.1.9) и асинхронные двигатели в рабочей части (АВ на кривой 3, рис.1.9);
3) мягкая механическая характеристика (10) - это характеристика, при которой с изменением момента скорость изменяется существенно. Такую характеристику имеют двигатели постоянного тока последовательного возбуждения, особенно в зоне больших угловых скоростей (кривая 4, рис.1.9).
5. Уравнение движения электропривода.
В общем случае между моментом, развиваемым двигателем, и моментом сопротивления системы “электродвигатель – рабочая машина” существует соотношение, называемое уравнением движения электропривода:
 ,
,
где
Мд
- момент, развиваемый двигателем; Мс
- момент
сопротивления системы, приведенный к
валу двигателя;
 – динамический момент (J-
момент инерции вращающихся частей
системы “двигатель - рабочая машина“,
приведенный к валу двигателя;
– динамический момент (J-
момент инерции вращающихся частей
системы “двигатель - рабочая машина“,
приведенный к валу двигателя;
 - угловое ускорение движущихся масс).
- угловое ускорение движущихся масс).
Уравнение
(1.3) показывает, что развиваемый двигателем
вращающий момент МД
уравновешивается моментом сопротивления
МС
и динамическим моментом
 на его валу.
на его валу.
Анализ уравнения (1.3) показывает следующее:
1)
при МДМс
величина
 ,
и в этом случае имеет место ускорения
привода;
,
и в этом случае имеет место ускорения
привода;
2)
при МД
Мс
величина  ,
т.е. имеет место замедление привода
(очевидно, что замедление привода может
быть и при отрицательном значении
момента двигателя);
,
т.е. имеет место замедление привода
(очевидно, что замедление привода может
быть и при отрицательном значении
момента двигателя);
3)
при Мд
= Мс
величина
 ,
в данном случае электропривод работает
в установившемся режиме.
,
в данном случае электропривод работает
в установившемся режиме.
6. Механическая и электромеханическая характеристика ДПТ независимого возбуждения.
Схемы включения двигателя постоянного тока независимого и параллельного возбуждения представлены на рис.2.1. При независимом возбуждении (рис.2.1а) обмотка якоря двигателя М и обмотка возбуждения ОВ питаются от разных, независимых друг от друга источников напряжения U и U в, а при параллельном возбуждении (рис.2.1б) - от одного и того же источника U. На практике чаще всего используется схема с параллельным возбуждением.
Аналитическое выражение механической характеристики двигателя можно получить из уравнения равновесия напряжений, составленного для якорной цепи по схеме рис.2.1а. При установившимся режиме работы двигателя (магнитный поток возбуждения и угловая скорость якоря постоянны) приложенное напряжение U уравновешивается падением напряжения в якорной цепи IЯR и электродвижущей силой (ЭДС) Е, наведенной в якоре в процессе его вращения, т.е.
 ,
(2.1)
,
(2.1)
где IЯ – ток в якорной цепи двигателя; R=RД+Rя - общее сопротивление якорной цепи, включающее в общем случае внутреннее сопротивление всей якорной цепи двигателя Rя и внешнее добавочное сопротивление RД.

Рис.2.1. Схема включения двигателя постоянного тока: а - независимого возбуждения; б – параллельного возбуждения |
Рис.2.2. Механическая характеристика двигателя постоянного тока независимого возбуждения |
Значение ЭДС определяется по выражению
E=kФ, (2.2)
где
k
– коэффициент, зависящий от конструктивных
параметров двигателя,
 (р
- число пар полюсов; N
- число активных проводников обмотки
якоря; а
– число пар параллельных ветвей обмотки
якоря); Ф,
– соответственно магнитный поток и
угловая скорость двигателя.
(р
- число пар полюсов; N
- число активных проводников обмотки
якоря; а
– число пар параллельных ветвей обмотки
якоря); Ф,
– соответственно магнитный поток и
угловая скорость двигателя.
Если
в (2.1) подставить (2.2) и решить полученное
уравнение относительно Iя=I,
то получим
 (2.3)
(2.3)
Уравнение (2.3) представляет собой зависимость тока якоря от скорости двигателя I=f(), которая называется электромеханической характеристикой двигателя. Электромеханическая характеристика (по устаревшей терминологии скоростная характеристика) отражает связь между электрической и механической величинами электродвигателя.
Для получения уравнения механической характеристики воспользуемся известной зависимостью момента двигателя от магнитного потока и тока якоря: М= kФI. 2,4
Подставив
в (2.4) значение тока I, определяемое по
выражению (2.3), получим уравнение
механической характеристики: (2.5) или
(2.5) или
![]() (2.6)
(2.6)
где С=kФ – коэффициент.
При неизменных параметрах U, Ф и R выражение (2.5) можно записать в виде
М=А-В, (2.7)
где
 ;
; - постоянные
коэффициенты.
- постоянные
коэффициенты.
Анализ уравнений (2.5, 2.6, 2.7) показывает, что механическая характеристика двигателя с независимым возбуждением имеет линейную зависимость и представляет собой прямую линию (рис.2.2).
7. Способы получения искусственных характеристик ДПТ.
Все электромеханические и механические характеристики электродвигателей разделяют на естественные и искусственные. Характеристики, полученные при номинальных параметрах электродвигателя и отсутствии в его цепях добавочных сопротивлений, называются естественными. Характеристики, полученные при несоблюдении хотя бы одного из этих условий, называются искусственными.
Искусственные механические характеристики двигателя постоянного тока, как видно из уравнения (2.5) (2.5), можно получить за счет изменения напряжения питающей сети U или магнитного потока возбуждения Ф, или сопротивления якорной цепи R путем включения изменения RД в цепь якоря двигателя. Рассмотрим влияние U, Ф, RД на механические характеристики двигателя более подробно.
Введение добавочного сопротивления в цепь якоря двигателя. На рис.2.3 представлены механические характеристики двигателя постоянного тока независимого возбуждения при изменении добавочного сопротивления в цепи якоря. Анализ уравнения (2.5), показывает, что при М=0 все характеристики проходят через одну точку, лежащую на оси абсцисс. Угловая скорость в этой точке имеет вполне определенное значение, не зависящее от сопротивления якорной цепи; она называется скоростью идеального холостого хода о; определяется по выражению (2.8) путем преобразования уравнения (2.5) при М=0:
 .
(2.8)
.
(2.8)
Наклон механической характеристики, или ее жесткость, согласно (2.7) зависит от величины добавочного сопротивления в цепи якоря и других параметров. На рис.2.3 показано влияние введенных добавочных сопротивлений в цепь якоря двигателя на его механические характеристики.
Введение добавочного сопротивления в якорную цепь используется на практике для регулирования скорости вращения двигателя и ограничения пусковых токов и моментов при его пуске.
Изменение напряжения питающей сети. Анализ уравнений (2.5) и (2.8) показывает, что при изменении напряжения, приложенного к якорной цепи двигателя, пропорционально меняется скорость идеального холостого хода. Наклон характеристик остается постоянным. Следовательно, механические характеристики, соответствующие различным значениям напряжения сети, будут между собой параллельны (рис.2.4.), т.е. при изменении U изменяются пусковой ток и момент, скорость идеального холостого хода двигателя. Угол наклона характеристик (жесткость) не меняется.

Рис.2.3. Механические характеристики двигателя постоянного тока независимого возбуждения при включении в цепь якоря добавочного сопротивления |
Рис.2.4. Механические характеристики двигателя постоянного тока при изменении напряжения питающей сети |
Изменение магнитного потока возбуждения. Анализ уравнений (2.5) и (2.8) показывает, что изменение магнитного потока двигателя оказывает влияние как на первое, так и на второе слагаемое, т.е. изменяются скорость идеального холостого хода и жесткость характеристики. Чем меньше магнитный поток, тем выше скорость идеального холостого хода и тем меньше жесткость механической характеристики. Искусственные механические характеристики двигателя, соответствующие различным величинам магнитного потока возбуждения, представлены на рис.2.5.

Рис.2.5. Механические характеристики двигателя постоянного тока независимого возбуждения при изменении магнитного потока возбуждения |
Рис.2.6. Естественная механическая характеристика двигателя постоянного тока, построенная по координатам двух точек 1 и 2 |
8. Тормозные режимы дпт.
Режим рекуперативного торможения возникает во всех случаях, когда скорость вращения двигателя оказывается выше скорости идеального холостого хода: ω > 0. В этом случае ЭДС двигателя Е будет больше приложенного напряжения U, двигатель будет работать генератором в режиме рекуперации параллельно с сетью, которой он будет отдавать электрическую энергию. При этом ток якоря меняет свое направление, что очевидно из равенства
 ,
(2.13)
,
(2.13)
следовательно, изменяет знак и момент двигателя, т.е. он переходит в режим рекуперативного торможения. При этом уравнение (2.4) запишется как, М = -kФI.
Поскольку переход в рекуперативный режим торможения происходит без изменения схемы включения двигателя (рис 2.1), для такого режима остаются справедливыми уравнения электромеханической (2.3) и механической (2.5) характеристик. Следовательно, характеристики в режиме рекуперации являются продолжением характеристик двигательного режима в область четвертого квадранта (рис.2.7).
Регулирование величины тормозного момента при т=const (на рисунке 2.7 2 или 3) или скорости вращения при МТ=const (на рисунке 2.7 М2 или М3) возможно путем изменения сопротивления RД в цепи якоря (рис.2.7). Недостатком данного способа торможения является то, что оно возможно только при скорости, превышающей скорость идеального холостого хода. Рекуперативное торможение используется в приводах подъемных механизмов при спуске груза, в обкаточных стендах при горячей обкатке двигателей внутреннего сгорания. Данный режим торможения экономичен, поскольку энергия, поступающая на вал двигателя, за вычетом потерь, отдается в сеть.

Рис.2.7. Механические характеристики двигателя постоянного тока независимого возбуждения при рекуперативном торможении |
Рис.2.8. Схема включения двигателя постоянного тока независимого возбуждения при динамическом торможении |
Режим динамического торможения получают при отключении якоря двигателя от сети и включении его на резистор RД (рис.2.8). Обмотка возбуждения при этом остается включенной в сеть. При динамическом торможении двигатель преобразует механическую энергию рабочей машины в электрическую. Однако эта энергия не отдается в сеть, а выделяется в виде теплоты в сопротивлениях цепи якоря и RД.
Так как после включения двигателя по схеме динамического торможения направление вращения якоря и направление магнитного потока возбуждения не меняются, то ЭДС двигателя в этом режиме сохраняет тот же знак, что и в двигательном режиме. Следовательно, на основании (2.3) и (2.5) приняв U=0, можно записать уравнение электромеханической и механической характеристик двигателя, работающего в режиме динамического торможения:
 ;
(2.14)
;
(2.14)
 .
(2.15)
.
(2.15)
При Ф=const характеристики (2.15) представляют собой прямые линии, проходящие через начало координат во втором и четвертом квадрантах прямоугольной системы координат (рис.2.9).
Наклон характеристик определяется величиной сопротивления Rд. Динамическое торможение, благодаря простоте исполнения и экономичности (энергия потребляется только обмоткой возбуждения), широко используется для плавной остановки привода при отключении его от сети. Оно достаточно экономично, хотя и уступает торможению с отдачей энергии в сеть.
Режим торможения противовключением. Режим торможения, при котором обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием внешнего момента или сил инерции вращается в противоположную сторону, называется торможением противовключением. Данный режим можно получить двумя способами, например, в приводе подъемника, когда двигатель включен на подьем, а момент, развиваемый грузом, вращает его в направлении спуска груза. По второму способу режим противовключения получается при переключении полярности на зажимах обмотки якоря или обмотки возбуждения.
При работе двигателя в режиме противовключения сила тока в якоре значительно больше по сравнению с силой тока при работе в двигательном режиме. Величина тока при этом прямо пропорциональна напряжению сети и ЭДС, наведенной в якоре. Для снижения тока якорной цепи двигателя, работающего в режиме противовключения, в цепь якоря включают дополнительное сопротивление.
На рис.2.10 приведена механическая характеристика двигателя, работающего в режиме торможения противовключением (тормозной спуск электровоза). Данный режим наблюдается в электроприводе стенда обкатки двигателей внутреннего сгорания при включении достаточно большого сопротивления в цепь якоря двигателя постоянного тока. В этом случае двигатель переводится из точки 1 на более мягкую искусственную характеристику в точку 2. В точке 2 момент двигателя МД становится меньше момента сопротивления Мс. В результате скорость привода уменьшается. В точке 3 скорость равна нулю, но так как момент двигателя в данной точке все еще меньше момента сопротивления, привод начнет разгоняться в противоположном направлении и фактически перейдет в режим торможения противовключением. В точке 4 момент двигателя уравновесится моментом сопротивления и привод будет вращаться с установившейся скоростью.

2
Рис.2.9. Механические характеристики двигателя постоянного тока независимого возбуждения в режиме динамического торможения
Рис.2.10. Механические характеристики двигателя постоянного тока независимого возбуждения в режиме торможения противовключением
При
снижении скорости вращения (линия 2-3)
ЭДС двигателя уменьшается и в точке 3
становится равной нулю. С увеличением
скорости в обратном направлении (линия
3-4) ЭДС меняет свой знак на противоположный
и совпадает по направлению с приложенным
напряжением. В этом случае ток якоря
 ,
(2.16) при этом <
0; Мт
0.
,
(2.16) при этом <
0; Мт
0.
Характеристика торможения противовключением является продолжением характеристики двигательного режима в область второго квадранта.
Для механизмов, имеющих момент сопротивления, обусловленный силами трения, режим торможения противовключением может быть получен путем изменения полярности на зажимах якоря двигателя.
9. Способы получения искусственных характеристик асинхронного двигателя.
Искусственные механические характеристики асинхронного двигателя можно получить за счет изменения напряжения или частоты тока в питающей сети либо введения добавочных сопротивлений в цепь статора или ротора.
Рассмотрим влияние каждого из названных параметров (U, f, Rд) на механические характеристики асинхронного двигателя.
Влияние напряжения питающей сети. Анализ уравнений (2.21) и (2.23) показывает, что изменение напряжения сети влияет на момент двигателя и не влияет на его критическое скольжение. При этом момент, развиваемый двигателем, изменяется пропорционально квадрату напряжения:
М≡ kU2, (2.28)
где k – коэффициент, зависящий от параметров двигателя и скольжения.
Механические характеристики асинхронного двигателя при изменении напряжения сети представлены на рис 2.13. В данном случае Uн= U1>U2>U3.
Влияние добавочного внешнего активного сопротивления, включенного в цепь статора. Добавочные сопротивления вводят в цепь статора для уменьшения пусковых значений тока и момента (рис.2.14а). Падение напряжения на внешнем сопротивлении является в данном случае функцией тока двигателя. При пуске двигателя, когда величина тока большая, напряжение на обмотках статора снижается.

Рис.2.14. Схема включения (а) и механические характеристики (б) асинхронного двигателя при включении активного сопротивления в цепь статора
При этом согласно уравнениям (2.21), (2.22) и (2.23) изменяются пусковой момент Мп, критический момент Мк и угловая скорость ωк. Механические характеристики при различных добавочных сопротивлениях в цепи статора представлены на рис.2.14б, где Rд2>R д1.
Влияние
добавочного внешнего сопротивления,
включенного в цепь ротора.
При включении добавочного сопротивления
в цепь ротора двигателя с фазным ротором
(рис.2.15а) его критическое скольжение
повышается, что объясняется выражением
 .
.

Рис.2.15. Схема включения (а) и механические характеристики (б) асинхронного двигателя с фазным ротором при включении добавочного сопротивления в цепь ротора
В выражение (2.23) величина R/2 не входит, так как эта величина не влияет на МК, поэтому критический момент остается неизменным при любом R/2. Механические характеристики асинхронного двигателя с фазным ротором при различных добавочных сопротивлениях в цепи ротора представлены на рис.2.15б.
Влияние
частоты тока питающей сети.
Изменение частоты тока влияет на величину
индуктивного сопротивления Xк асинхронного двигателя и, как видно из
уравнений (2.18), (2.22), (2.23) и (2.24), оказывает
влияние на синхронную угловую скорость
0,
критическое скольжение Sк
и критический момент Mк.
Причем
асинхронного двигателя и, как видно из
уравнений (2.18), (2.22), (2.23) и (2.24), оказывает
влияние на синхронную угловую скорость
0,
критическое скольжение Sк
и критический момент Mк.
Причем
 ;
;
 ;
0f,
где C1,
C2
- коэффициенты, определяемые параметрами
двигателя, не зависящими от частоты
тока f.
;
0f,
где C1,
C2
- коэффициенты, определяемые параметрами
двигателя, не зависящими от частоты
тока f.
Механические характеристики двигателя при изменении частоты тока f представлены на рис.2.16.
fH
>
f1

Рис.2.16. Механические характеристики асинхронного двигателя при изменении частоты тока питающей сети
10. Механическая характеристика асинхронного двигателя. Построение по каталожным данным. Формула Клосса.
Для
асинхронного двигателя в каталогах
приводятся следующие номинальные
данные: мощность Pн;
напряжение Uн;
частота тока fн;
частота вращения nн;
кратность пускового момента
 ;
кратность минимального момента
;
кратность минимального момента
 ;
кратность максимального момента
;
кратность максимального момента
 .
.
Для построения естественной характеристики асинхронного двигателя необходимо определить координаты пяти характерных точек (рис.2.17). Координаты характерных точек, используя номинальные данные двигателя, определяют следующим образом.
Координаты первой точки:
момент
двигателя М=0,
скольжение S=0.
Синхронная угловая скорость ротора
 .
.
Рис.2.17.
Естественная механическая характеристика
асинхронного двигателя, построенная
по каталожным данным, где 1…5 –
характерные точки
Рис.2.18.
Механические характеристики
асинхронного двигателя, работающего
в режиме рекуперативного торможения,
где ωК.Е
и ωК.И
-
угловые
скорости, соответствующие естественной
и искусственной механическим
характеристикам


номинальный
момент двигателя
 ;
номинальное скольжение
;
номинальное скольжение
 ;
номинальная угловая скорость двигателя
;
номинальная угловая скорость двигателя
 .
.
максимальный
момент двигателя MК=kmaxMн,
критическое скольжение
 ;
критическая угловая скорость
;
критическая угловая скорость
ротора ωк=ω0(1-SК).
минимальный момент в период разбега двигателя Мmin=kminMн; скольжение, соответствующее минимальному моменту двигателя, выбирают в пределах Smin=0,84…0,86; угловая скорость, соответствующая минимальному моменту: ωmin=ω0(1-Smin).
пусковой момент двигателя Мп=kПМн; cкольжение двигателя S=1; угловая скорость ротора ω=0.
Соединив точки 1…5 линией, получаем механическую характеристику асинхронного электродвигателя (рис 2.17).