

Порядок загрузки программы в стенд
На персональном компьютере загрузить программу Keil uVision2.
В редакторе Keil набрать текст программы для 8051.
Сохранить набранный файл с расширением *.с.
Откомпилировать набранную программу соответствующими средствами.
Возможные ошибки в программе можно просмотреть в одноименном файле с расширением *.LST.
После устранения всех ошибок данные файла с расширением *.НЕХ программой EVAL32.EXE необходимо перенести в стенд. Программа EVAL32.EXE предложит выбрать номер последовательного порта.
Вывод на экран подсказки о параметрах программы EVAL32, осуществляется запуском EVAL32.EXE.
При передаче данных с персонального компьютера в стенд на экране монитора отображаются передаваемые данные. Эти же данные отображаются на индикаторе стенда HG1. Горит светодиод HL1.
После передачи последнего байта при наличии перемычки J1 загруженная программа запускается автоматически.
При отсутствии перемычки J1, либо при необходимости перезапуска программы загруженной в стенд нажать кнопку S13.
Остановка загруженной программы и переход в режим ожидания на прием данных с персонального компьютера возможно нажатием кнопки S14. При этом гаснет светодиод HL1.
Запись новой программы возможна в любой момент времени работы загруженной программы.
Пример загрузки программы в стенд
На персональном компьютере запустить программу Keil uVision2.
Появится окно с пробной программой.
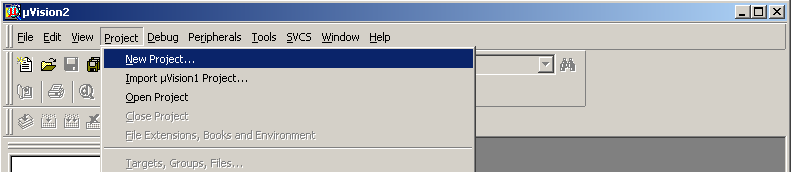
3 Закрыть текущий проект.

4 Создать новый текстовый документ.

5 Сохранить файл.
6 Сохранить файл будущей программы с именем robot.c.
7 Создать новый проект.
8 Сохранить файл нового проекта с именем robot.

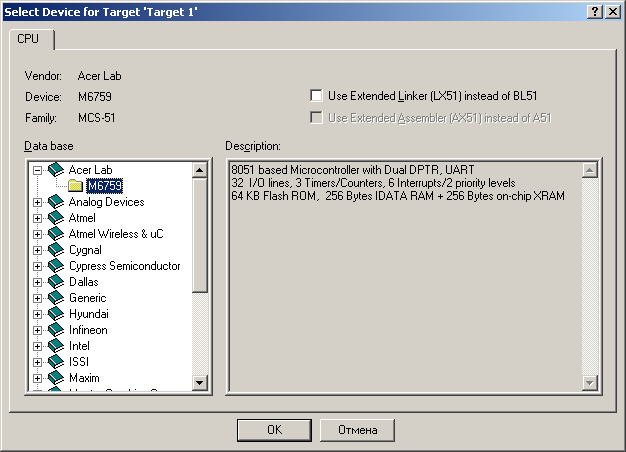
9 Открыть дерево Acer Lab, выделить файл М6759. Принять предложение.
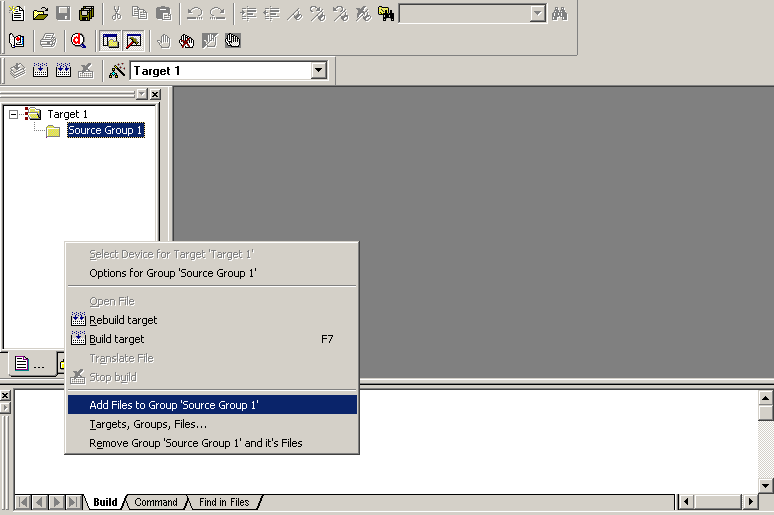
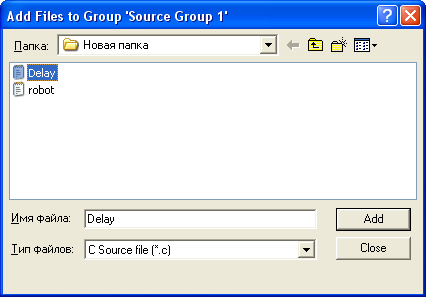
10 Открыть дерево Target 1. Выделив папку Sourse Group 1, щелкнуть правой кнопкой мыши по полю выбора источника для вызова контекстного меню и добавления файла в рабочую группу.
11 Добавить ранее созданный файл robot.с.
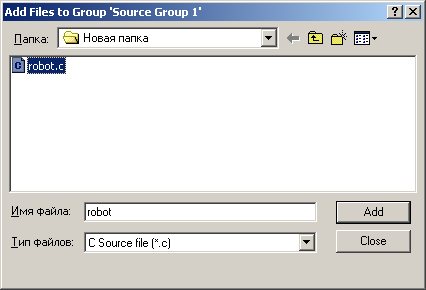
Добавить ранее скопированный в текущую папку файл Delay.с.
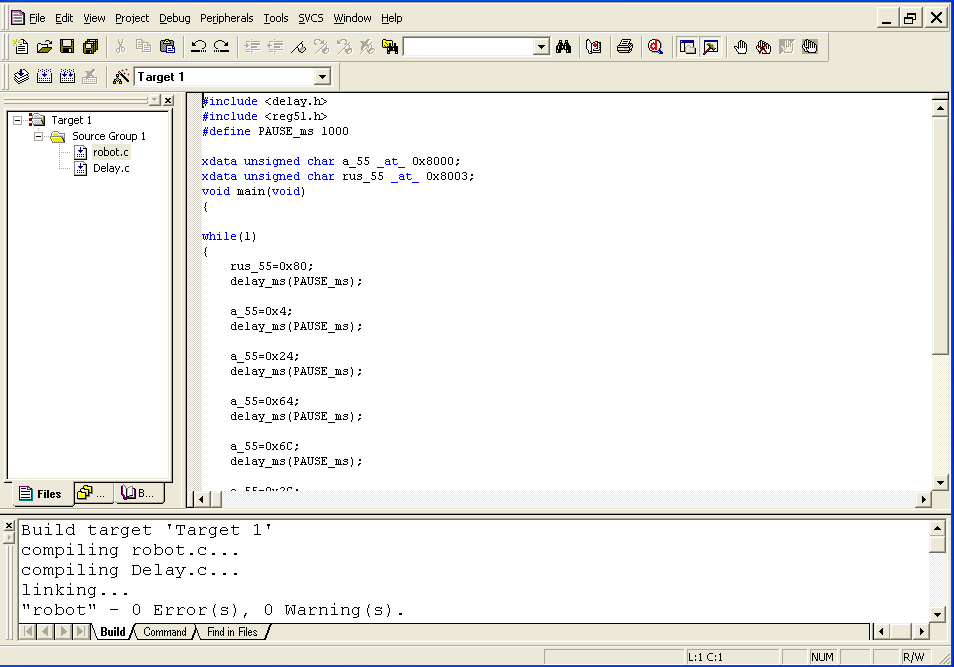
Ввести управляющую программу в редактор.
В текущей папке необходимо наличие файлов delay.h и delay.с.
Пример управляющей программы
#include <delay.h> //подключение дополнительных модулей для работы с #include<reg51.h> //портами и задержкой времени
#define PAUSE_ms 1000 //описывается константа для времени задержки (1000 ms)
xdata unsigned char a_55 _at_ 0x8000; //символьная переменная (адресация порта А)
xdata unsigned char rus_55 _at_ 0x8003; // символьная переменная (адрес порта //управляющего слова)
void main(void) //виртуальная функция программы
{ //начало управляющей программы
while(1) //организация цикла(зацикливание)
{ //начало цикла
rus_55=0x80; //инициализация порта
delay_ms(PAUSE_ms); //задержка
a_55=0x4; //рука вперед
delay_ms(PAUSE_ms); //пауза
a_55=0x24; //схват
delay_ms(PAUSE_ms); //пауза
a_55=0x64; //рука вверх
delay_ms(PAUSE_ms); //пауза
a_55=0x6C; //рука вправо
delay_ms(PAUSE_ms); //пауза
a_55=0x2C; //рука вниз
delay_ms(PAUSE_ms); //пауза
a_55=0x0C; //разжать схват
delay_ms(PAUSE_ms); //пауза
a_55=0x08; //рука назад
delay_ms(PAUSE_ms); //пауза
a_55=0x00; //начальное положение
delay_ms(PAUSE_ms); //пауза
} //конец цикла
} //конец программы
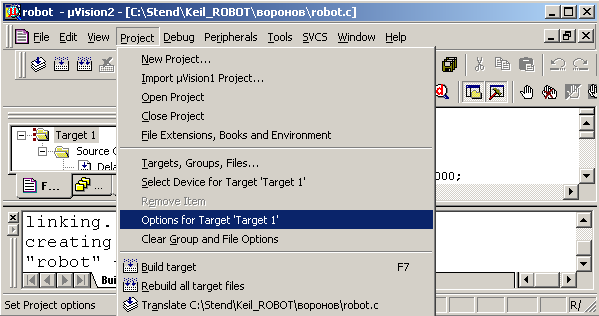
16 Необходимо войти в настройки проекта для настройки компиляции.
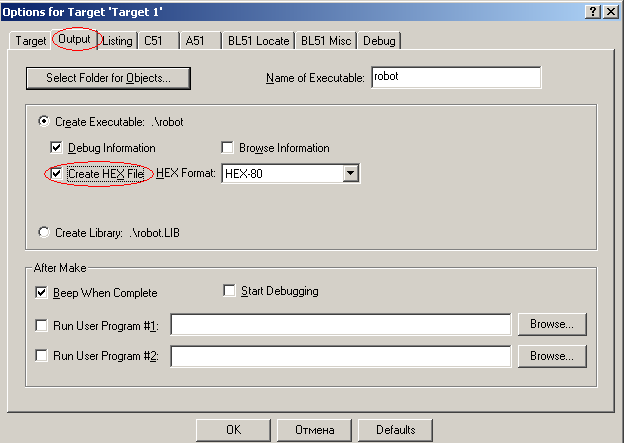
17 Выбрать вкладку Output и установить создание загрузочного файла (*.hex).
18 Произвести компиляцию проекта.

19 Об отсутствии ошибок и предупреждений говорится в окне компиляции.
