

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИУКРАИНЫ
Донбасская государственная машиностроительная академия
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторных работ по дисциплине
"Гибкое автоматизированное производство"
(для студентов очной формы обучения специальности 7.092501)
Краматорск 2014
УДК 621.365
Методические указания к выполнению лабораторных работ по дисциплине "Гибкое автоматизированное производство " (для студентов специальности 7.092501) /Сост.: В.Г.Макшанцев. - Краматорск: ДГМА, 2012.‑ 58с.
Приведены современные системы управления работой роботизированных технологических комплексов на базе перепрограммируемых микроконтроллеров, даны примеры программирования.
Составитель В.Г.Макшанцев, доц
Ответственный за выпуск О.В.Субботин, доц.
СОДЕРЖАНИЕ
стр
Общие положения ……………………………………………………………….4
Лабораторная работа №1. Исследование цикловой системы
программного управления ЭЦПУ-6030 на базе РТК1………………………...5
Лабораторная работа №2. Управление РТК2 с помощью
контроллера МКП-1……………………………………………………………….16
Лабораторная работа №3. Изучение системы управления B&R2003
на базе РТК3……………………………………………………………………….26
Лабораторная работа №4.: Изучение программно-аппаратного
комплекса «EV8031/AVR» и управление РТК 4………………………………42
Список рекомендуемой литературы……………………………………………..56
ОБЩИЕ ПОЛОЖЕНИЯ
Предложенные лабораторные работы направлены на получение практических навыков и закрепление теоретических знаний по принципиальным основам построения и эксплуатации робототехнических систем. Основное внимание уделяется изучению устройств роботов, исследованию их характеристик и принципов управления робототехническими комплексами. При подготовке к выполнению каждой работы студент должен:
изучить соответствующие материалы в конспекте лекций и теоретические разделы литературы, рекомендуемые в данных методических указаниях;
познакомиться с описанием лабораторной работы;
составить таблицы для записи результатов;
усвоить правила техники безопасности при работе с приборами и устройствами.
По каждой лабораторной работе студент составляет индивидуальный отчет, который должен содержать краткие теоретические сведения, принципиальные схемы и результаты исследований в виде таблиц и графиков с необходимыми пояснениями и выводами. Отчеты выполняются в 12-листовой тетради или на листах формата А4, при этом все листы отчета должны быть сброшюрованы.
Во время зачета студент должен показать прочные знания по соответствующим разделам дисциплины, а также по использованию методов экспериментального исследования и расчета.
Лабораторные работы выполняются только с разрешения преподавателя и в его присутствии.
Перед началом лабораторных работ необходимо:
убедиться в том, что робот, система управления и компрессор отключены от электропитания;
убрать все посторонние предметы из рабочей зоны робота;
занять рабочие места вне рабочей зоны робота.
Если при эксплуатации робота появились визуально регистрируемые неисправности, необходимо его немедленно отключить и сообщить об этом преподавателю.
После завершения работ лабораторный стенд предъявляется преподавателю и затем выключается. Все органы управления должны находиться в исходном положении.
ЛАБОРАТОРНЫЙ ПРАКТИКУМ
Создание гибкого автоматизированного производства (ГАП) включает в себя организацию производства со следующими характерными признаками:
Гибкость производства, т.е. возможность быстрого перехода с изготовления одного вида изделий на другой.
Автоматизированность всех или большинства операций, включая обработку изделий, управление и переналадку.
Объединенность производства общим транспортом и управлением.
В ГОСТе 26228-85 «Системы производственные гибкие. Термины и определения», дано определение: «Роботизированный технологический комплекс (РТК) – совокупность единицы технологического оборудования, промышленного робота и средств оснащения, автономно функционирующая и осуществляющая многократные циклы.
РТК, предназначенные для работы в ГПС, должны иметь автоматизированную переналадку и возможность встраиваться в систему.
В качестве технологического оборудования может быть использован ПР-РПК.
Средствами оснащения РТК могут быть: устройства накопления, ориентации, поштучной выдачи объектов производства и другие устройства, обеспечивающие функционирование РТК.
Лабораторный практикум проводится на базе лабораторных стендов, имитирующих роботизированные технологические комплексы для механической обработки деталей, включающие в себя промышленный робот, систему управления, технологическое оборудование, вспомогательное оборудование. Структурная схема роботизированного модуля включает накопитель Н для подачи заготовок и отвода готовых деталей, робот Р для загрузки-выгрузки технологического оборудования и станок С (рис.1.1).
Рисунок 1.1 – Структура роботизированного модуля
Робот как объект управления представляет собой сложную электромеханическую систему, состоящую из многозвенной механической конструкции (рабочего механизма), исполнительного устройства и электронной системы управления. Для рассмотрения пространственного движения рабочего механизма, представленного последовательным соединением вращательных и поступательных кинематических пар 5-го класса (как наиболее часто применяемых в робототехнике), осуществляют выбор систем координат. Каждому звену манипулятора ставят в соответствие декартову систему координат Oixiyizi (i=0, 1, ..., N). Здесь N – число звеньев манипулятора.
На рис. 1.2 показана кинематическая схема промышленного робота «Универсал-15», для которой выбраны связанные системы координат.
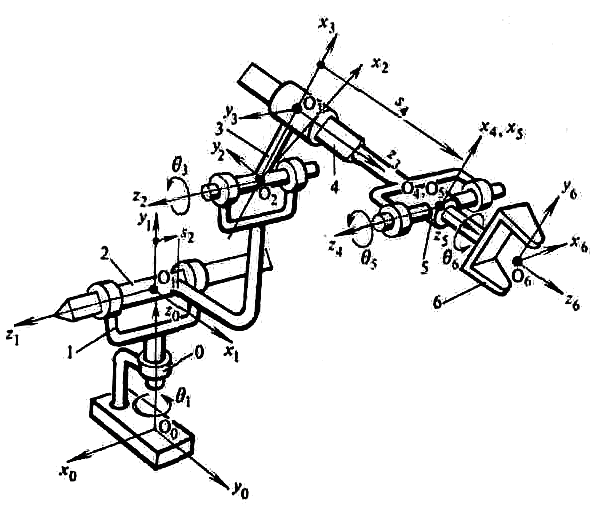
Рисунок 1.3 – Кинематическая схема промышленного робота «Универсал-15»
Сочлененные
соседние звенья манипулятора образуют
кинематическую пару, если возможно их
относительное перемещение. Класс
кинематической пары определяется числом
условий связи
![]() ,
налагаемых на относительное движение
звеньев, образующих пару. Кинематической
паре k-го класса соответствует
,
налагаемых на относительное движение
звеньев, образующих пару. Кинематической
паре k-го класса соответствует
![]() независимых параметров, определяющих
относительное положение звеньев, где
h — число степеней свободы кинематической
пары. Число степеней свободы манипулятора
определяется числом независимых
движений, в которых могут участвовать
его звенья.
независимых параметров, определяющих
относительное положение звеньев, где
h — число степеней свободы кинематической
пары. Число степеней свободы манипулятора
определяется числом независимых
движений, в которых могут участвовать
его звенья.
Рабочий механизм непосредственно воздействует на объект или среду. Исполнительное устройство включает совокупность приводов с соответствующими датчиками обратной связи, усилительными, преобразующими и корректирующими элементами.
Задача управления роботом заключается в формировании управляющих воздействий для исполнительных двигателей, отработка которых гарантировала бы прохождение захватным устройством манипулятора заданной пространственной траектории с заданной точностью.
Задача формирования управляющих воздействий сводится к построению программной траектории qp(t), т. е. закона изменения вектора относительного положения звеньев манипулятора q=[q1, q2, …, qi, …, qN]T, и последующему синтезу собственно закона управления, обеспечивающего устойчивость движения относительно программной траектории.
Многообразие систем управления роботами можно группировать по разным признакам. Однако имеются достаточно общие признаки, которые принципиально характеризуют процесс управления роботом. Прежде всего это способ управления, определяемый в зависимости от степени участия оператора в управлении роботом.
В лабораторном практикуме рассматриваются программные системы управления, основой которых является синтез движения робота по заранее рассчитанной преимущественно жесткой программе. Программа сохраняется в памяти вычислительного устройства и может быть изменена путем перепрограммирования в новом цикле обучения робота. Главная особенность систем автоматического управления роботами — отсутствие непосредственного участия человека в процессе управления. Функция оператора состоит лишь в обучении, запуске и последующем периодическом наблюдении за работой робота.
ЛАБОРАТОРНАЯ РАБОТА №1
ИССЛЕДОВАНИЕ ЦИКЛОВОЙ СИСТЕМЫ ПРОГРАММНОГО УПРАВЛЕНИЯ ЭЦПУ-6030 НА БАЗЕ РТК1
Цель работы: изучение оборудования, входящего в состав РТК, устройства и принципа действия цикловой системы программного управления ЭЦПУ-6030, освоение методики программирования и приобретение практических навыков настройки работы робота по заданной программе.
ОБЩИЕ СВЕДЕНИЯ
РТК1 включает промышленный робот МП-9С, систему управления ЭЦПУ-6030, технологическое оборудование ‑ вертикально-сверлильный станок с ЧПУ мод. 2Р135Ф2, вспомогательное оборудование – тактовый стол мод. СТ 150.