

Методичні вказівки до виконання курсової роботи з дисципліни
“Основи схемотехніки”
Розглянемо виконання курсової роботи на прикладі.
Нехай задано наступні вихідні умови:
1)Тип тригерів: R S- тригер
2) Базис І ,АБО, НЕ
3)Таблиця кодування положень керуючого пристрою (кодування станів керуючого пристрою задано в десятковій системі числення, а в таблицю записуємо їх у двійковій системі числення)
-
Стан
Кодована комбінація
Q2
Q1
а0
0
0
а1
0
1
а2
1
0
а3
1
1
4)Алгоритм функціонування керуючого пристрою в мікроопераціях(рис.1)
ВСТУП
Схемотехніка – це технічна дисципліна, яка вивчає принципи реалізації електронних пристроїв і систем з використанням електронних компонентів.
Комп'ютерна схемотехніка - це технічний напрямок, зв’язаний із розробкою, відлагодженням, обслуговуванням цифрових комп'ютерних, комп'ютеризованих та інтегрованих схем.
Ці знання необхідні фахівцям, зв'язаним із інтенсивним використанням комп’ютерної техніки, автоматизованих систем обробки даних і керування, спеціалістам з електроніки та радіотехніки, цифрових автоматів.
Швидке розширення областей застосування електронних пристроїв - одна з особливостей сучасного науково-технічного прогресу. Цей процес в певній мірі пов'язаний з впровадженням інтегральних мікросхем в універсальні обчислювальні комплекси; периферійні пристрої; пристрої реєстрації та передачі інформації; автоматизовані системи управління; пристрої для наукових дослідів; механізації та інженерної праці; побутові пристрої. Застосування інтегральних мікросхем дозволило удосконалити і створити нові методи проектування, конструювання і виробництва радіоелектронної апаратури різноманітного призначення, підвищити їх технічні та експлуатаційні характеристики, традиційно виконаних на механічних принципах дії.
Мета даної курсової роботи - закріплення теоретичного матеріалу з дисципліни « Основи схемотехніки», а також набуття практичних навиків синтезу схем з використанням простих логічних елементів.
1 Розробка функціональної схеми керуючого пристрою
1.1 Опис структурної схеми процесорного пристрою
Процесорний пристрій(як і будь-який складний цифровий пристрій) синтезується у вигляді з’єднання двох пристроїв - операційного та керуючого, показаного на рисунку 1.1.
Рисунок 1.1 - Структурна схема процесорного
пристрою
Операційний пристрій - це пристрій, в якому виконуються операції. Він включає в себе регістри, суматор, канали передачі інформації, мультиплексори и для комутації каналів, шифратори, дешифратори і т.д.
Керуючий пристрій координує дії вузлів операційного пристрою; він виробляє в певній часовій послідовності керуючі сигнали, під дією яких у вузлах операційного пристрою виконуються необхідні дії.
Процес функціонування операційного пристрою розпадається на певну послідовність елементарних дій в його вузлах.
Кожна елементарна дія, яка виконується в одному із вузлів операційного пристрою протягом одного тактового періоду , називається мікрооперацією.
В певні тактові періоди одночасно можуть виконуватись декілька мікрооперацій. Така сукупність операцій, які виконуються одночасно, називається мікрокомандою, а весь набір мікрокоманд , призначених для рішення певної задачі, - мікропрограмою.
Таким чином, якщо в операційному пристрої передбачається можливість виконання n різних мікрооперацій, то із керуючого пристрою виходять n керуючих кіл, кожне із яких відповідає визначеній мікрооперації. І якщо в операційному пристрої необхідно виконати деяку мікрооперацію, то достатньо із керуючого пристрою по певному керуючому колу подати сигнал(наприклад, рівень лог.1). Внаслідок того, що керуючий пристрій визначає мікропрограму, тобто котрі і в якій часовій послідовності повинні виконуватись мікрооперації, він отримав назву мікропрограмний автомат(цифровий автомат).
Формування керуючих сигналів у1, у2….уn ( рис.1.1) для виконання певних мікрокоманд може залежати від стану вузлів операційного пристрою, котрі визначаються сигналами х1, …,хs і які передаються з відповідних виходів операційного пристрою на входи керуючого пристрою. Керуючі сигнали у1, у2….уn можуть залежати також від зовнішніх сигналів хs+1, …,хL
Результати обробки, яка виконується в операційному пристрої, знімаються з його виходів z1,. ….zm
1.2 Принцип побудови керуючого пристрою на основі схемної логіки
Існує два принципово різних підходи в проектуванні мікропрограмного автомату(керуючого пристрою): використання принципу схемної логіки або принципу програмованої логіки. Розглянемо побудову керуючого пристрою на основі схемної логіки.
При застосуванні принципу схемної логіки в процесі проектування підбирається певний набір цифрових мікросхем (зазвичай малої та середньої степені інтеграції) і визначається така схема з’єднання їх виводів, яка б забезпечувала необхідне функціонування пристрою(тобто, функціонування процесорного пристрою визначається тим, які вибрані мікросхеми і за якою схемою виконано з’єднання їх виводів ).
Пристрої, побудовані за принципом схемної логіки здатні забезпечувати найвищу швидкодію при заданому типі технологічних елементів. Недолік цього принципу побудови процесорних пристроїв полягає в тому, що проблемно застосувати інтегральні мікросхеми високої та надвисокої степені інтеграції. Це пов’язано з тим, що для різних процесорних пристроїв необхідно буде використовувати різні ВІС, які будуть вузькоспеціалізованими. Всяка зміна або розширення виконуваних функцій в пристроях, побудованих за принципом схемної логіки, тягне за собою демонтаж пристрою і монтаж пристрою за новою схемою.
При проектуванні керуючого пристрою необхідно сформулювати задачу, котру повинен виконати даний пристрій.
1.3 СИНТЕЗ КЕРУЮЧОГО ПРИСТРОЮ НА ОСНОВІ СХЕМНОЇ ЛОГІКИ
1.3.1 Побудова схеми алгоритму роботи керуючого пристрою
Функціонування керуючого пристрою може бути описане в словесній формі.
Приведемо в умовному записі список мікрооперацій та список ознак, які виконуються у вузлах операційного пристрою для нашого прикладу. Тоді кожному керуючому сигналу у1, у2….у7 відповідає певна мікрооперація, а ознаки Х1 та Х2 формуються в операційному пристрої. Мікрооперації визначають усі операції, що виконуються у регістрах та блоках операційного пристрою. Робота керуючого пристрою передбачає перевірку сформованих операційним пристроєм ознак.
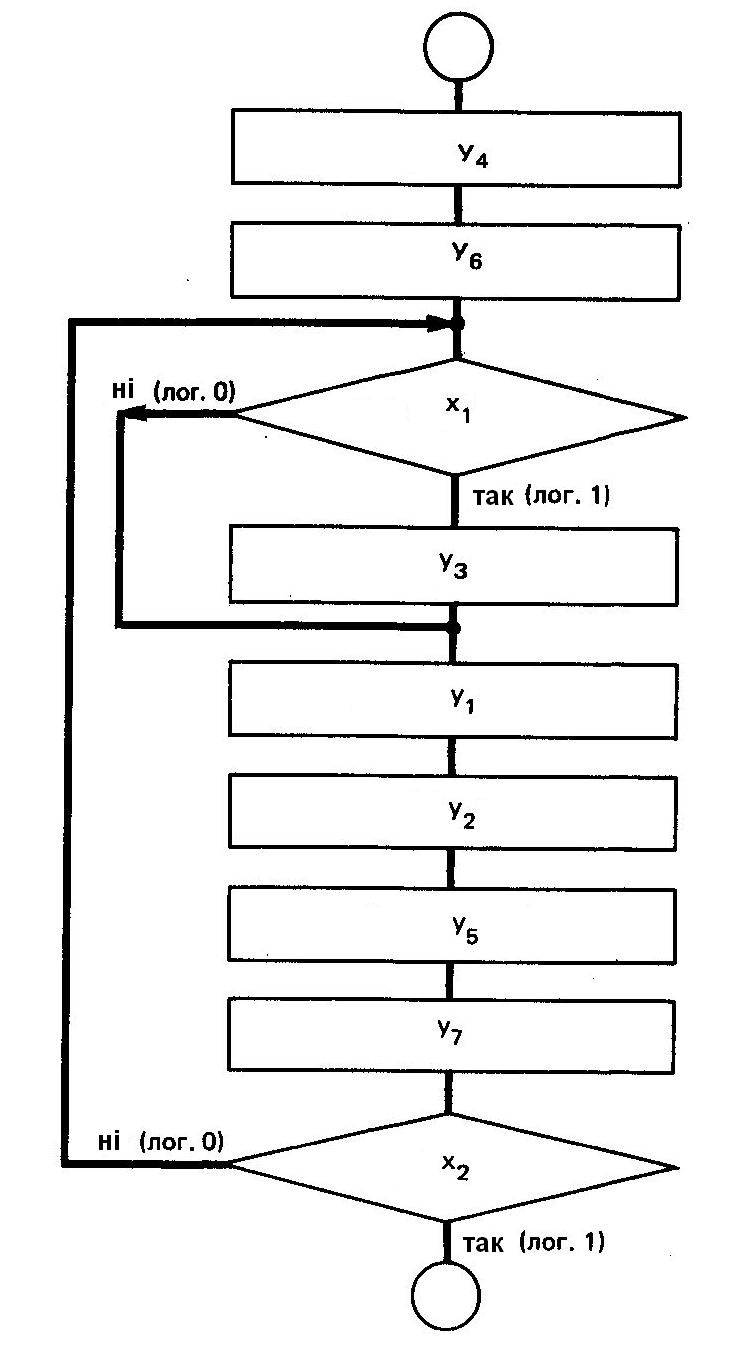
Зручніше, звичайно, представити функціонування керуючого пристрою у вигляді алгоритму, який відображає послідовність переходів керуючого пристрою з попереднього положення в наступне і формування відповідних керуючих сигналів. Кожний керуючий сигнал викликає елементарну дію - мікрооперацію. Алгоритм функціонування керуючого пристрою, в якому відображені всі мікрооперації, приведений на рисунку 1.2, в якому прямокутник відповідає операторному блокові, а ромб- умовному.
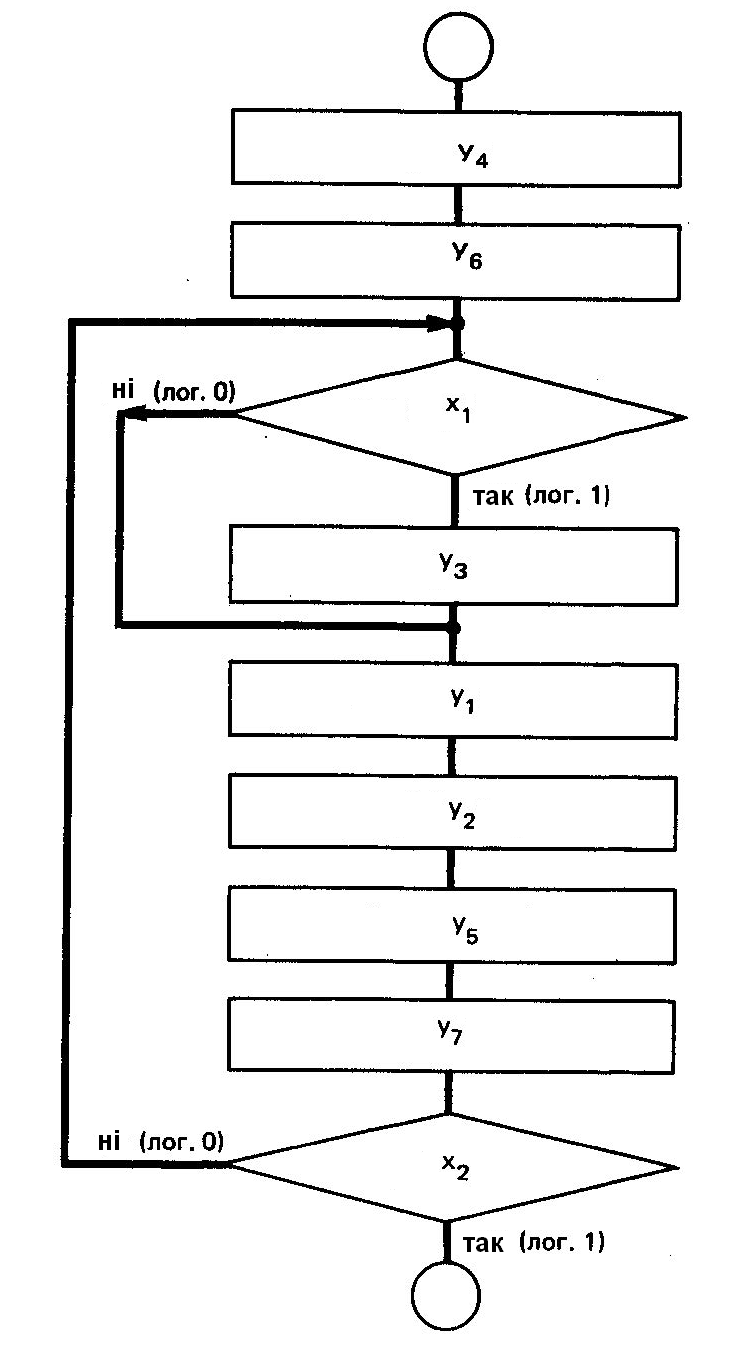
Рисунок 1.2 - Алгоритм функціонування керуючого пристрою в мікроопераціях
Я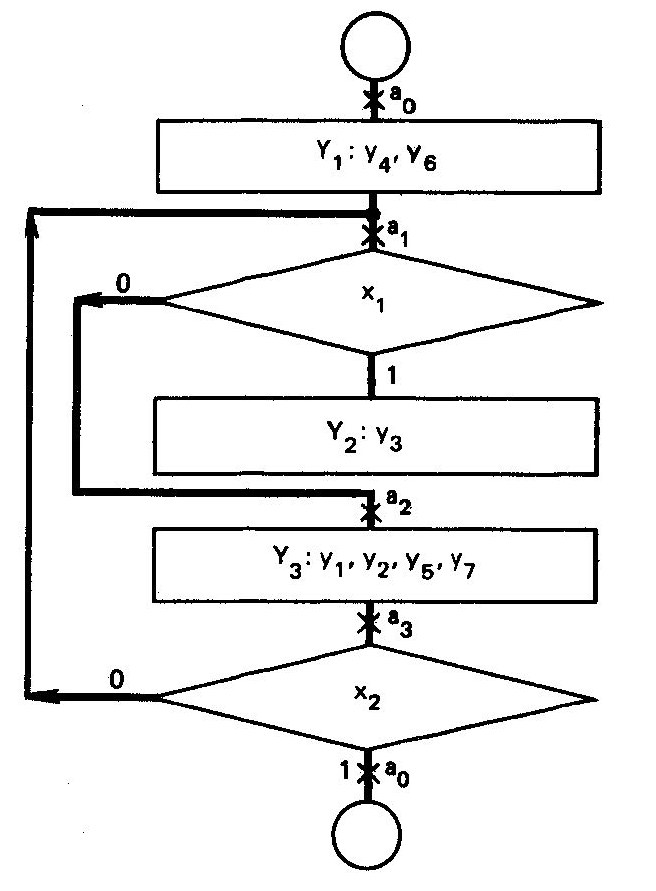 к
правило, деякі мікрооперації можуть
виконуватися одночасно. Такі групи
мікрооперацій об’єднуються в
мікрокоманди. Для формування мікрокоманд
необхідно визначити, які мікрооперації
можуть виконуватися одночасно(в одні
і ті ж тактові періоди). Очевидно,
мікрооперації У4
, У6 можуть
бути об’єднані в одну загальну
мікрокоманду У1;
мікрооперація У3
не може бути об’єднаною з будь - якими
іншими мікроопераціями і, відповідно,
вона буде мікрокомандою У2
; мікрооперації У1
, У2,
У5, У7
можна виконувати
також об’єднати в
мікрокоманду У3.
Приклад алгоритму у мікрокомандах
показано на рисунку 1.3.
к
правило, деякі мікрооперації можуть
виконуватися одночасно. Такі групи
мікрооперацій об’єднуються в
мікрокоманди. Для формування мікрокоманд
необхідно визначити, які мікрооперації
можуть виконуватися одночасно(в одні
і ті ж тактові періоди). Очевидно,
мікрооперації У4
, У6 можуть
бути об’єднані в одну загальну
мікрокоманду У1;
мікрооперація У3
не може бути об’єднаною з будь - якими
іншими мікроопераціями і, відповідно,
вона буде мікрокомандою У2
; мікрооперації У1
, У2,
У5, У7
можна виконувати
також об’єднати в
мікрокоманду У3.
Приклад алгоритму у мікрокомандах
показано на рисунку 1.3.
Рисунок 1.3- Алгоритм функціонування керуючого пристрою в мікрокомандах
1.3.2 Побудова графа функціонування керуючого пристрою
Керуючий пристрій є логічним
пристроєм послідовного типу. Мікрокоманда,
яка видається в наступному тактовому
періоді, залежить від того, яка
мікрокоманда видається в біжучому
тактовому періоді, тобто, від стану, в
якому знаходиться пристрій. Для визначення
станів пристрою проводиться розбивка
схеми алгоритму, тобто визначається
кількість положень керуючого пристрою
(положення відмічається після операторного
блоку). З рисунку 1.3 видно, що синтезований
керуючого пристрою має чотири положення:
а0,
а1,
а2,
а3
. У вершинах графа
вказуються всі
положення керуючого
пристрою..
Вершини з’єднуються
гілками, над якими вказують сигнали-умови,
які викликають перехід в наступний
стан, і керуючі сигнали, які формуються
в даному положенні. Робота керуючого
пристрою починається з початкового
положення а0.
В це положення
повертається керуючого пристрою в кінці
алгоритму. Для забезпечення заданої
кількості положень в склад керуючого
пристрою включають схему регістру
стану, який складається з тригерів.
Кількість тригерів визначається з
умови 2к
![]() N,
де к- кількість тригерів, N-
кількість положень керуючого пристрою.
Граф переходів керуючого пристрою
показано на рисунку 1.4
N,
де к- кількість тригерів, N-
кількість положень керуючого пристрою.
Граф переходів керуючого пристрою
показано на рисунку 1.4
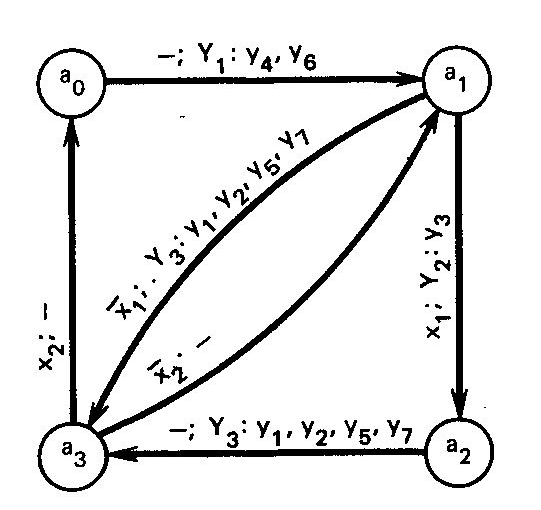
Рисунок 1.4 – Граф керуючого пристрою
1.3.4 Побудова таблиці функціонування пристрою
Після побудови графу переходів керуючого пристрою здійснюють кодування станів цього пристрою.
Кожному положенню керуючого пристрою відповідає певна комбінація вихідних сигналів тригерів. Встановлення відповідності між положенням керуючого пристрою та станом тригерів називається кодуванням положень керуючого пристрою
Число розрядів коду вибирається
з наступних міркувань: якщо число станів
рівне М, то для забезпечення М кодових
комбінацій необхідно взяти k-
розрядний код, де k-
мінімальне ціле число, при якому
виконується нерівність М![]() 2
2![]() .
В нашому прикладі М=4 і k=2.
Таким чином, стан пристрою відображається
двох розрядними кодовими комбінаціями.
Задамо відповідність між станом пристрою
та кодовими комбінаціями в таблиці 1.2
.
В нашому прикладі М=4 і k=2.
Таким чином, стан пристрою відображається
двох розрядними кодовими комбінаціями.
Задамо відповідність між станом пристрою
та кодовими комбінаціями в таблиці 1.2
Таблиця 1.2- Кодування положень цифрового автомата
-
Стан
Кодована комбінація
Q2
Q1
а0
0
0
а1
0
1
а2
1
0
а3
1
1
1.3.3 Структурна схема керуючого пристрою
Структурна схема керуючого пристрою представлена на рисунку 1.5
Рисунок 1.5- Структурна схема керуючого пристрою
Тригери Tr1 та Tr2 утворюють двох розрядний регістр біжучого стану пристрою. Комбінаційну схему на логічних елементах(КЛС) в подальшому називають комбінаційним вузлом (КВ). Комбінаційний вузол за станом регістра (комбінації значень Q2 та Q1) і значенням умов Х2 та Х1, котрі поступають з виходу операційного пристрою, визначає новий стан, в який повинен перейти пристрій. При цьому формуються такі сигнали S2, R2, S1, R1, які в момент додатного фронту синхронізуючого сигналу С встановлюють в регістрі кодову комбінацію, яка відповідає наступному стану керуючого пристрою. Комбінаційний вузол формує також керуючі сигнали У1,У2,У3,У4,У5,У6,У7, під дією яких в операційному пристрої виконуються мікрооперації.
Подальші операції по синтезу пристрою зводяться до синтезу комбінаційного вузла.
1.3.4 Побудова таблиці функціонування керуючого пристрою
Таблиця функціонування містить графи, в які заносяться дані поточного стану, значення вхідних умов, дані наступного стану, в який повинен перейти пристрій та вихідні сигнали комбінаційного вузла.
Функціонування комбінаційного вузла пристрою, який розглядається, приведено в таблиці 1.3
Таблиця 1.3-Таблиця функціонування комбінаційного вузла пристрою
Біжучий стан |
Наступний стан |
Умови переходу |
Вихідні сигнали |
|||||
Позначення |
Кодова комбінація |
Позначення |
Кодова комбінація |
Установка тригерів регістра |
Керуючі сигнали мікрооперацій |
|||
Q |
Q |
Q |
Q |
|||||
а3 |
1 |
1 |
а0 |
0 |
0 |
|
R2 , R1 |
- |
а0 |
0 |
0 |
а1 |
0 |
1 |
- |
S1 |
Y1 : У4,У6 |
а3 |
1 |
1 |
а1 |
0 |
1 |
|
R2 |
- |
а1 |
0 |
1 |
а2 |
1 |
0 |
|
S2 , R1 |
Y2: У3 |
а1 |
0 |
1 |
а3 |
1 |
1 |
|
S2 |
Y3: У1,У2,У3,У7 |
а2 |
1 |
0 |
а3 |
1 |
1 |
- |
S1 |
Y3: У1,У2,У3,У7 |
З а значеннями біжучого стану, який приймається із регістра станів, і значенням умов Х1 та Х2, які поступають з операційного пристрою, в таблиці визначається наступний стан, сигнали R2, S2 R1, S1, необхідні для встановлення регістра в наступний стан, та керуючі сигнали У1, У2,… У7. Заповнення таблиці здійснюється наступним чином. В графі наступного стану задається а0 ; по графу на рисунку 1.4 знаходиться гілка, яка веде у вузол, котрий відповідає стану а0; знайдена гілка виходить із вузла а3, відповідно, біжучий стан а3; на гілці вказано умову переходу Х2. Заносимо у таблицю кодові комбінації а3 і а0 , при цьому виясняється, що перехід а3 а0 зв’язаний з переходами Q2 : 1 0 та Q1 : 1 0 . Із таблиці переходів R S- тригера (таблиця 1.4) визначаємо, що R2 =1 і R1= 1. Сигнали мікрооперацій не формуються.
Таблиця 1.4 - Таблиця переходів R S- тригера
-
Вид переходу тригера
Сигнали на входах RS – тригера
S
R
0 0
0
Х
0 1
1
0
1 0
0
1
1 1
Х
0
Далі в наступну стрічку таблиці заноситься наступний стан а1, із графу виясняється, що перехід в стан а1 можливий по двох гілках, які виходять із станів а0 та а3. кожній із гілок в таблиці функціонування відповідає окрема стрічка. Заповнюємо стрічки аналогічно. Число стрічок в таблиці рівне числу гілок у графі.