

Автоматическая локомотивная сигнализация и спутниковая навигация
Совершенствуются системы управления, связанные с внедрением спутниковых технологий. Современные технические решения используют глобальные навигационные спутниковые системы ГЛОНАСС и ГЛОНАСС/GPS, системы цифровой связи. Ведется массовое оснащение российского железнодорожного транспорта спутниковыми навигационными системами, интегрированными в единую систему координатного управления. Координатное управление должно стать базой оперативного мониторинга и прогнозирования ситуаций для подвижных единиц и каждого участвующего в технологическом процессе звена.
Решаются задачи внедрения спутниковых технологий для определения в режиме реального времени местоположения железнодорожных транспортных средств, используемых для движения поездов и маневровой работы на станциях.
Системы цифровой связи составляют важнейшее технологическое звено, обеспечивающее передачу данных и команд с подвижного состава в диспетчерские центры и центры управления перевозками. В 2005 г. началось внедрение маневровой и горочной автоматических локомотивных сигнализаций (МАЛС/ГАЛС) с интегрированными средствами спутниковой навигации. Эти устройства определяют местоположение маневровых локомотивов с погрешностью не более 1 м в местной системе координат (номер пути и местоположение на пути).
Автоматическая локомотивная сигнализация на сортировочных станций в настоящее время обеспечивает автоматизированное управление:
- маневровыми локомотивами, в том числе в процессах надвига, роспуска и маневровой работы (подсистема Горочной автоматической локомотивной сигнализации ГАЛС Р)
- горочными светофорами и указателями количества вагонов при роспуске составов (подсистема Горочное программно-задающее устройство);
- стрелками ГАЦ с контролем исполненного роспуска и маневровых перемещений на спускной части горки (подсистема Микропроцессорной горочной автоматической централизации с ведением накопления ГАЦ МН);
- замедлителями тормозных позиций (подсистема Устройство управления прицельным торможением УУПТ);
- компрессорными установками (подсистема Комплексная система управления компрессорной станцией КСАУКС).
Использование автоматической локомотивной сигнализации (ГАЛС Р) позволяет обеспечить безопасность движения при расформировании составов и при проведении маневровых передвижений на станции, повысить перерабатывающую способность горки и улучшить условия труда локомотивных бригад и ДСП при маневровой работе, надвиге и роспуске составов.
Система ГАЛС Р обеспечивает формирование и передачу информации на локомотивы, осуществляющие маневровые передвижения, надвиг и роспуск составов по организованным маршрутам. Передача информации на локомотивы осуществляется по цифровому каналу радиосвязи непрерывно на протяжении всего времени работы локомотива в системе.
Система ГАЛС Р обеспечивает работу на станции в следующих режимах:
- выполнение маневрового маршрута: контроль запрещающих сигналов и стрелок, установленных не по маршруту;
- надвиг - подача состава из парка прибытия до вершины горки при открытом горочном сигнале;
- подтягивание - подача состава из парка прибытия до повторителя горочного сигнала при закрытом горочном сигнале или открытом горочном сигнале при надвиге состава по другому пути надвига;
попутный надвиг - подача состава из парка прибытия по маневровым сигналам, в том числе вслед распускаемому составу;
- роспуск состава - надвиг состава после вступления на изолированную секцию перед горочным сигналом;
- движение назад - осаживание состава в сторону парка прибытия.
Основной надвиг и подтягивание составов осуществляется поездным порядком (по поездным маршрутам), попутный надвиг - маневровым порядком. Для регулирования движения в режимах, перечисленных выше, на локомотив передается следующая информация:
- маршрутное задание;
- зона ограничения передвижения локомотива в обоих направлениях, выраженная в блок-участках и расстояниях до конца маршрута;
- сигнальные показания попутных светофоров (при попутном надвиге);
- значение допустимых и заданных скоростей роспуска и надвига в км/ч;
- показания горочного сигнала;
- режим работы (маневровый маршрут, надвиг, роспуск);
- режим управления (автоматический, местного задания, ручной).
В режиме роспуска и основного надвига локомотивный светофор сигнализирует теми же огнями, что и горочный светофор. В режиме попутного надвига сигнальное показание локомотивного светофора определяется состоянием маневрового сигнала перед надвигаемым составом. При открытом маневровом сигнале - красный с желтым, при закрытом – красный.
В режиме подтягивания локомотивный светофор сигнализирует жёлтым огнём до вступления состава на изолированный участок перед ПГ, а затем перекрывается на красный огонь.
При экстренном перекрытии выходных сигналов с пути и горочных сигналов формируется команда остановки и на локомотивном светофоре загорается красный огонь.
Управление маршрутами в системе ГАЛС Р осуществляет ДСП по зонам контроля и управления, установленным Технико-распорядительным актом станции. У каждого ДСП установлен свой АРМ.
Управление маршрутами надвига осуществляет дежурный по станции центрального поста парка А.
На мониторе АРМ ДСП и АРМ ЭЦ отображается план станции с текущим состоянием изолированных участков, сигналов и положением стрелок зоны контроля и управления (рис. 7.13). Для каждого рабочего места, где устанавливается АРМ, программа настраивается на отображение фрагмента, соответствующего контролируемой зоне конкретного ДСП.

Рис. 7.13. Экран монитора АРМ ДСП
При заступлении на смену дежурный по станции обязан зарегистрировать новую смену в АРМ ДСП. Для этого дежурный по станции вводит фамилии свою и сигналиста и регистрирует момент начала новой смены.
Прибытие поезда на путь в парке фиксируется автоматически при проследовании входного светофора станции. Если же автоматическая регистрация прибытия не произошла или на путь прибыл маневровый локомотив с группой вагонов, то дежурный по станции вводит информацию вручную.
Дежурный определяет количество тормозных башмаков, которые следует установить и сообщает об этом по рации сигналисту. Сигналист устанавливает тормозные башмаки и сообщает об этом ДСП, который регистрирует это на пульте.
Выезд поездного локомотива фиксируется автоматически. Программа сама фиксирует:
задан маневровый маршрут с пути;
стрелочная секция, прилегающая к пути, занимается и освобождается при занятом пути.
Оператору также предоставляется возможность регистрации факта выезда поездного локомотива с пути приема вручную. Для этого в меню есть пункт «УХОД ПОЕЗДН». И надо указать номер пути, с которого ушел локомотив.
Заезд поездного локомотива фиксируется вручную. Для этого необходимо в меню выбрать пункт «ЗАЕЗД ПОЕЗДН» и ввести номер пути, на который он должен заехать.
Предусмотрено два варианта регистрации заезда маневрового локомотива под состав – автоматический и ручной.
Автоматическая регистрация осуществляется при заезде маневрового локомотивом на занятый составом путь. Дежурный по станции задает номер пути, локомотива и местоположение локомотива. Заезд маневрового локомотива под состав фиксируется. После регистрации заезда маневрового локомотива на видеограмме состава появляется изображение маневрового локомотива и его номер.
Уход маневрового локомотива из-под состава фиксируется автоматически.
Дежурный по станции передает сигналисту указание о снятии с такого-то номера пути соответствующего количества башмаков.
После получения информации от сигналиста о снятии башмаков ДСП фиксирует, выбрав в основном меню пункт «СНЯТИЕ ЗАКРЕПЛЕНИЯ».
Момент начала надвига состава определяется программой автоматически. Для этого определенные реле отслеживают задание маршрута как поездного, так и маневрового. При вступлении головы состава на участок перед горочным сигналом режим движения автоматически переключается на роспуск с соответствующим изменением скорости движения.
Момент окончания роспуска может быть зафиксирован тремя способами:
- если локомотив вступил на последнюю секцию маршрута перед горочным светофором и остановился, то машинист может зафиксировать окончание маршрута с пульта БА ГАЛС Р. После этого передается телеграмма на пост и фиксируется конец роспуска;
- если локомотив вступил на последнюю секцию маршрута, и горочный сигнал перекрылся на красный, то в этом случае автоматически фиксируется момент окончания роспуска;
- если локомотив заехал за горочный светофор и, тем самым, освободил последнюю секцию маршрута, то и в этом случае автоматически фиксируется окончание роспуска.
Для замены бумажного журнала с целью облегчения труда дежурного по станции и более эффективного накопления информации предназначен электронный технологический журнал. Существуют два типа журнала:
- для отображения событий: прибытия поезда, с указанием номера пути; выезда поездного локомотива в депо; простоя локомотива в парке; времени окончания технического и коммерческого осмотров; времени окончания роспуска состава;
- для учёта закрепления вагонов, в котором отображаются действия, связанные с установкой и закреплением вагонов.
Электронный журнал формируется на основе информации, накопленной в протоколе системы ГАЛС Р, который ведется в постовом контроллере. По запросу ДСП необходимая информация поступает на АРМ ДСП и отображается на экране монитора. Для этого ДСП должен выбрать в основном меню пункт "ЖУРНАЛ", после чего на экране появится диалоговое окно, где ДСП может выбрать тип журнала.
Внешний вид экрана монитора бортовой аппаратуры в кабине маневрового локомотива (БА ГАЛС Р) представлен на рис. 7.14.
На мониторе отображается следующая информация:
зона перемещения локомотива в обоих направлениях;
допустимые скорости движения в обоих направлениях;
фактическая скорость движения;
скорость надвига и роспуска;
режим работы БА ГАЛС Р;
позиция контроллера локомотива;
исправность и функционирование аппаратуры ГАЛС Р;
комментарии.
На мониторе представлена информация (рис. 7.14):
Скорость фактическая, измеряемая датчиками импульсов, установленными на 2-ой и 5-ой осях локомотива;
Скорость допустимая – максимально разрешенная скорость движения локомотива, определяется ПТЭ и ТРА станции, а также временными ограничениями (2' – при движении вперед; 2" – при движении назад);
Индикаторы направления движения локомотива: не заштрихованный треугольник указывает на текущее направление движения локомотива. (3' – при движении вперед; 3" – при движении назад);
Длина маршрута до места остановки (4' – при движении вперед; 4" – при движении назад);
1
2'
3'
4'
5'
4"
5"
6
7
2"
3"
8'
8"
9"
9'
10"
11
12
13
14
15

10'
16
Рис. 7.14. Экран монитора в кабине маневрового локомотива
Количество свободных блок-участков. (5' – впереди локомотива; 5" – позади локомотива);
Заданная скорость устанавливается в режиме телеуправления по командам с поста, а в режиме «местное задание» машинистом в диапазоне допустимых скоростей;
Позиции контроллера машиниста: (ПК+ - при движении; ПК- -при торможении);
Позиция плавного регулирования тока в обмотке возбуждения возбудителя. Цифры от 0 до 14. (8' – уменьшение тока; 8" – увеличение тока);
Информация о типе маршрута:
«ДО СИГНАЛА»;
«ЗА СИГНАЛ»;
«НА ЗАНЯТЫЙ ПУТЬ»;
«ОСНОВНОЙ НАДВИГ»;
«ПОДТЯГИВАНИЕ»;
«ПОПУТНЫЙ НАДВИГ»;
«РОСПУСК» (9' – при движении вперед; 9" – при движении назад);
Название сигнала, до которого разрешено движению локомотива. (10' – при движении вперед; 10" – при движении назад);
Режим работы локомотива:
«Р» - ручной,
«А» - авторежим;
Контроль работы приемопередатчика. Возможны следующие виды обозначений:
"ПУСТО" – связь есть, но для данного локомотива телеграммы не поступают;
"ОПРОС" – осуществляется ввод локомотива в систему;
"СВЯЗЬ" – на локомотив поступаю телеграммы проверки связи;
"МАРШ" – прием телеграммы с маршрутным заданием;
"КОНТР" – контроль зоны перемещения, после получения маршрутного задания;
"СОСТАВ" – прием телеграммы с информацией о составе;
"(", ")" смена скобок 1 раз/сек – радио обмен осуществляется в нормальном режиме;
"#" – предыдущая телеграмма с локомотива не поступила на пост или радиообмен есть, но нет телеграммы для данного локомотива;
"(((●)))" – отсутствие связи;
Поле для дополнительной информации:
координата локомотива – "ПУТЬ";
информация о составе (если локомотив стоит под составом):
"ГРУЗ" – особый признак груза;
"ВАГ" – количество вагонов в составе;
"ВЕС" – вес состава в тоннах;
"БАШМ" – количество установленных башмаков.
Поле для вывода оперативных сообщений – 3 строки;
Значение давления в тормозной магистрали в МПа;
Значение тока генератора в кА.
После того, как оператор задаст маршрут надвига для состава, на локомотив поступает команда на надвиг. На мониторе появляется информация о маршруте:
тип маршрута (надвиг);
конечный элемент маршрута (горочная секция);
длина маршрута;
количество свободных блок-участков;
значение допустимой скорости.
На светофоре блока информации (БИ) зажигается огонь, соответствующий горочному светофору.
Во время надвига и роспуска движение может происходить в двух режимах:
ручной режим – контроллером управляет машинист;
авторежим – контроллером управляет БА ГАЛС Р.
Авторежим состоит из двух режимов:
телеуправление – скорость задается системой ГАЛС Р;
местное задание – скорость задается машинистом с клавиатуры блока управления (БУ).
Для перехода в этот режим машинист должен поставить рукоятку контроллера в любое положение кроме нулевого и нажать клавишу "Auto" на клавиатуре. При этом работой цепей управления будет управлять контроллер БА ГАЛС Р.
На мониторе появится следующая информация:
вид операции (надвиг-роспуск);
заданная скорость;
допустимая скорость;
фактическая скорость;
количество свободных блок-участков;
расстояние от головы состава до конца маршрута – S;
режим "А".
От БА ГАЛС Р на ПК ГАЛС Р поступают значения заданной и фактической скорости движения, направление движения, координата и номер локомотива, обеспечивающие визуальный контроль за движением состава со стороны оперативного персонала станции.
В процессе управления на мониторе будет отображаться позиция контроллера, на которой в данный момент времени движется локомотив, результаты регулирования скорости БА ГАЛС Р в соответствии с заданной скоростью, значение которой поступает с ПА ГАЛС Р.
Значение допустимой скорости определяется по ТРА станции и вносится в конфигурацию программы на этапе установки программного обеспечения. Значение этой скорости будет меняться по мере приближения «головы» состава к горбу при надвиге и в зависимости от показаний горочного светофора при роспуске в сторону ее уменьшения.
Во всех режимах движения смена команды сопровождается кратковременным свистком ЭПК, а перекрытие сигнала или снижение заданной скорости - обесточиванием ЭПК, восстанавливаемым после однократного нажатия на рукоятку бдительности.
При необходимости изменить скорость машинист должен нажать клавишу "0" на клавиатуре БУ и далее с помощью "Стрелок" установить необходимую скорость. Значение скорости можно проследить под надписью "ЗАДАНИЕ". БА ГАЛС Р будет поддерживать скорость ± 0,5 км/ч. Для возвращения в режим телеуправления машинист должен повторно нажать клавишу "0".
Для перехода в ручной режим машинист должен нажать кнопку "Cancel" (при этом локомотив не теряет тягу) или перевести рукоятку контроллера в нулевую позицию. В этом режиме управление силовой установкой локомотива осуществляет машинист в штатном режиме согласно ПТЭ и ТРА станции. При этом на мониторе будет отображен ручной режим работы локомотива "Р".
Дальнейшим развитием систем автоматизации станционных процессов с применением спутниковой навигации спутниковой навигации стал ИТАУР, разработанный ОАО «НИИАС» и ООО «ЦИТ Транс М», и внедренный на сортировочной станции Ярославль-Главный. ИТАУР обеспечивает управление оперативной работой станции на основе ведения планов прибытия поездов в расформирование, поездообразования и отправления с использованием электронной технологии оперативного планирования работы на основе вариантных графиков отправления поездов во взаимодействии диспетчерского аппарата дорожных центров управления перевозками, локомотивных депо, станционных и маневровых диспетчеров.
Установленные на маневровых локомотивах приемники глобальной навигационной спутниковой системы позволяют не только контролировать точное местонахождение локомотивов, а соответственно и маневровых составов, но и отражать достоверную информацию об их использовании и качестве работы.
ИТАУР содержит исчерпывающую информацию о работе с поездами и локомотивами (рис. 7.15). Окно «План прибытия поездов в расформирование» содержит данные о плановых поездах, которые должны прибыть в расформирование с глубиной прогнозного времени 3 ч. Каждый час этот план корректируется с учетом поступившей информации.
Окно «Локомотивы с поездами в расформирование» предоставляет информацию о всех событиях с поездными локомотивами, прибывшими с поездами. Окно «Работа с поездами в расформирование» в реальном времени показывает весь технологический процесс обработки поездов, прибывших в расформирование. Данные о событиях автоматически поступают в АСУ СТ для отображения на графике исполненной работы.
Окно «Заявки на маневровую работу» в виде мнемокода показывает вид работы, поезд, подлежащий расформированию, количество вагонов, их начальная и конечная дислокация в соответствии с сортировочным листком и
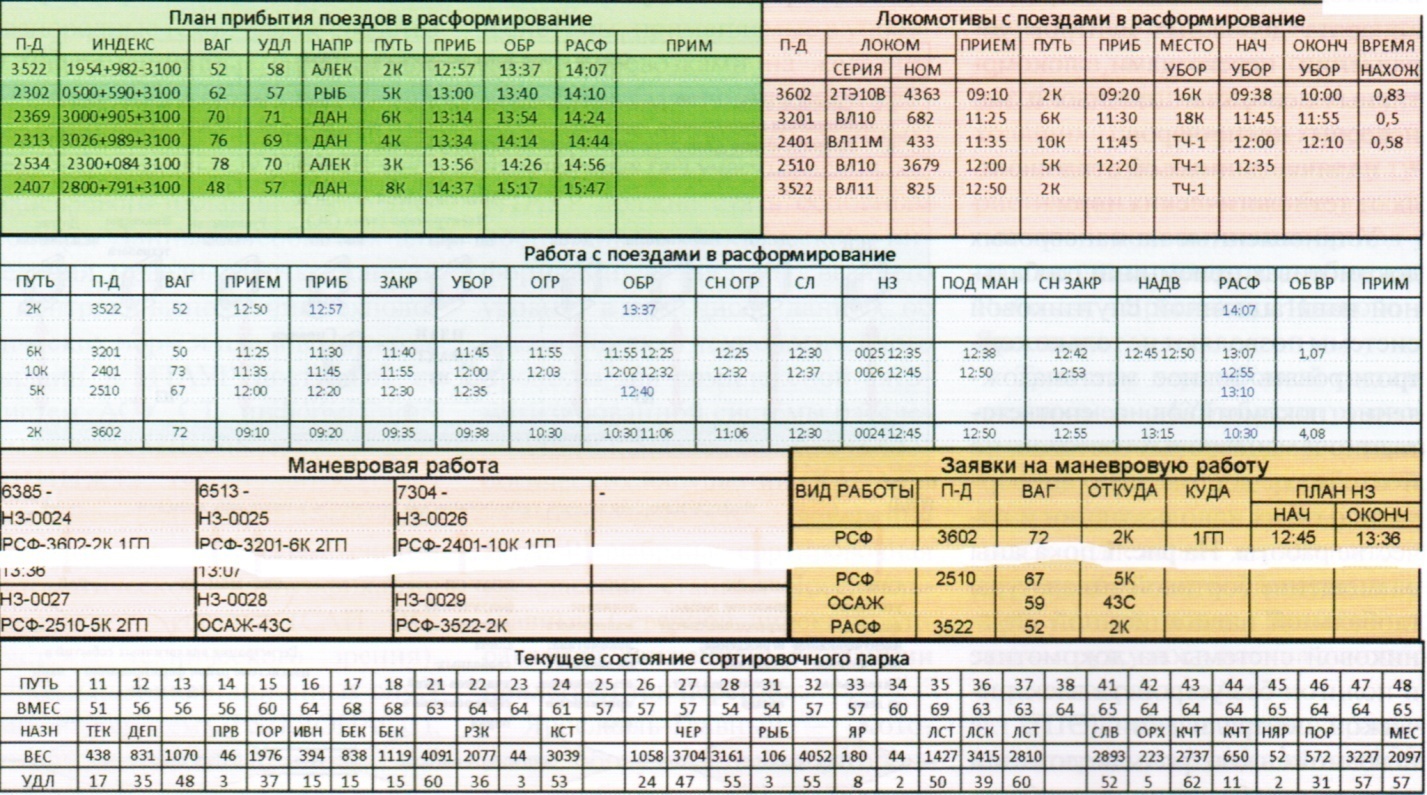
Рис. 7.15. АРМ ДСЦ: подсистема «Расформирование»
плановые времена начала и окончания работы по наряд-заданию. Окно «Текущее состояние сортировочного парка» показывает наличие вагонов на путях сортировочного парка в процессе накопления.
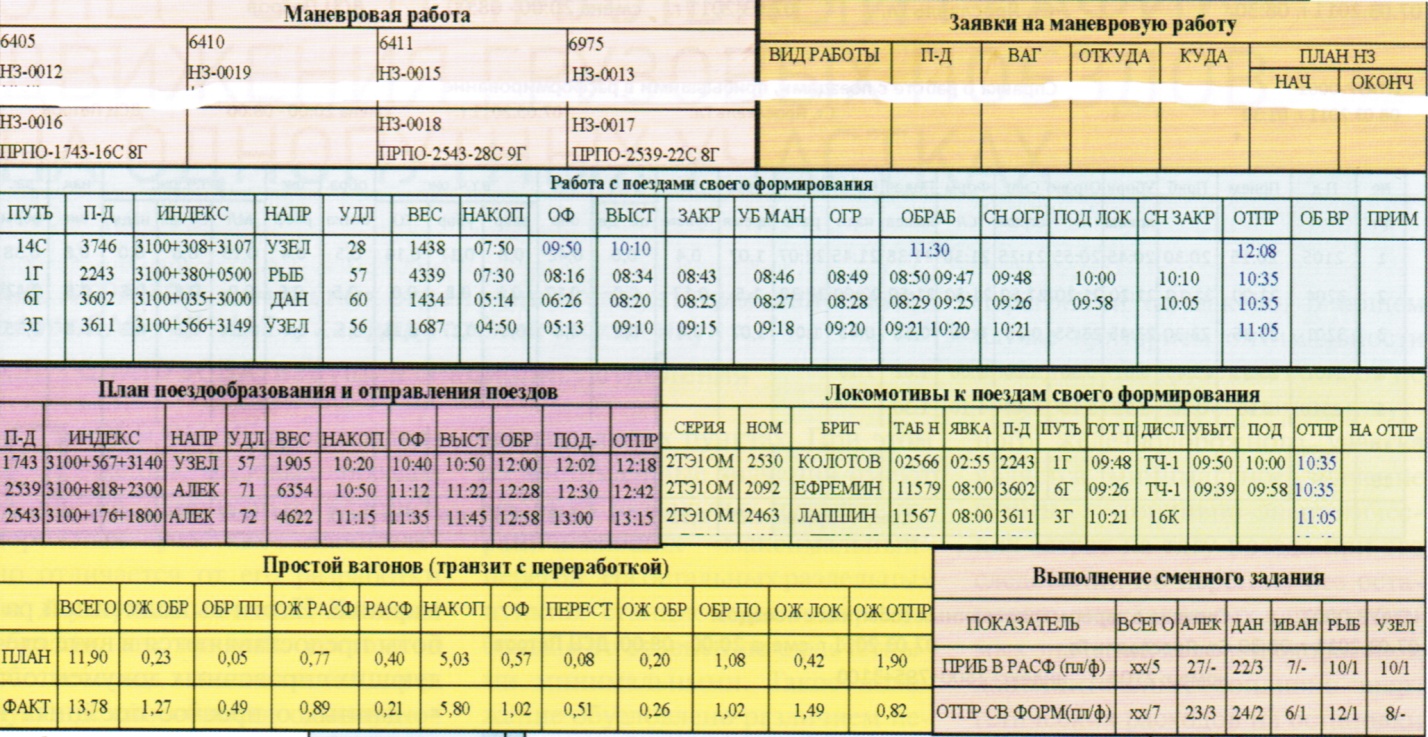
Рис. 7.16. АРМ ДСЦ: подсистема «Формирование»
На экране «Формирование» (рис. 7.16) показан процесс формирования поездов. Окно «План поездообразования и отправления поездов» основан на вариантных расписаниях отправления поездов с учетом взаимодействия диспетчерского аппарата дорожных центров управления перевозками, станций и локомотивных депо. Эта информация в ходе диалога может корректироваться.
Маневровая работа на станции контролируется с помощью экрана, отображающего мнемосхему ее путевого развития. Подсистема «Маневровый автодиспетчер» на основании текущего плана работы станции и сортировочного листка автоматически формирует наряд-задание на расформирование состава, осаживание вагонов в сортировочном парке, окончание формирования состава со стороны парка отправления, перестановку состава в парк отправления.