

Содержание:
Общие сведения о механизме 3
 1
Структурный анализ механизма 4
1
Структурный анализ механизма 4
1.1 Структурная схема механизма 4
1.2 Наименование звеньев и кинематических пар 4
1.3 Определение числа степеней свободы 4
1.4 Разложение механизма на структурные группы 5
2 Кинематический анализ рычажного механизма 6
2.1 Построение планов положения механизма 6
2.2 Построение планов скоростей 7
2.3 Построение планов ускорений 9
2.4Построение графиков функции положения и передаточных функций выходного звена 11
2.5 Расчет погрешностей построения 12
3. Силовой анализ механизма 14
3.1 Расчёт сил действующих на звенья 14
3.2 Силовой расчёт двухповодковых групп 14
3.3 Определение уравновешивающей силы методом Жуковского 18
3.4 Расхождение полученных значений методом сил и методом 19
Жуковского
4 Расчёт маховика для машинного агрегата с абсолютно твёрдыми звеньями 20
4.1 Приведение сил 20
4.2 Приведение масс 21
4.3 Определение момента инерции маховика по диаграмме Виттенбауэра 22
5 Проектирование эвольвентного прямозубого зацепления 24
5.1 Исходные данные 24
5.2 Расчёт 24
6 Синтез кулачкового механизма 28
6.1 Исходные данные 28
6.2 Аналитические выражения второй и первой передаточных функций и функции положения 28
6.3 Расчёт и построение графиков второй и первой передаточных функ- ций положения толкателя 30
6.4 Определение основных геометрических характеристик механизма 32
6.5 Определение координат теоретического профиля 32
6.6 Определение радиуса ролика 33
7 Список использованной литературы 34
 Общие
сведения о механизме
Общие
сведения о механизме
Механизмы прошивного пресса
Мощные прошивные прессы (обычно с гидравлическим приводом) широко применяют в металлообрабатывающей промышленности. На них получают полые заготовки для цилиндров и отверстия в деталях, а также используют при протяжке цельнотянутых труб.
1 Структурный анализ механизма
Структурная схема механизма
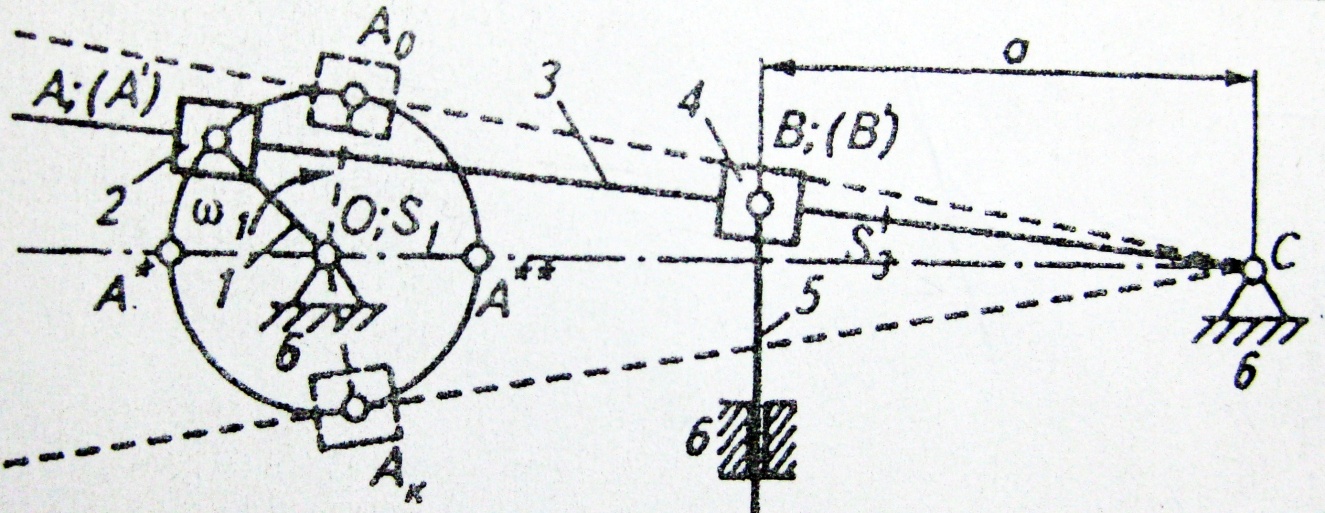
D
Рисунок 1.1 – Структурная схема механизма прошивного пресса
1.2 Наименование звеньев и кинематических пар
Таблица 1.1 Наименование звеньев
№ звена |
Название звена |
0 |
Стойка |
1 |
Кривошип |
2 |
Ползун |
3 |
Кулиса |
4 |
Ползун |
5 |
Пуансон |
Таблица 1.2 Наименование кинематических пар
Обозначение пары |
Наименование пары |
Номера звеньев, входящих в пару |
Названия звеньев |
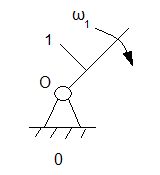
О |
Вращательная |
0,1 |
Стойка, кривошип |
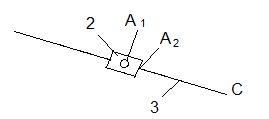
A1 |
Вращательная |
1,2 |
Кривошип, ползун |
A2 |
Поступательная |
2,3 |
Ползун, кулиса |
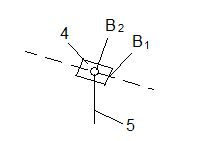
В1 |
Поступательная |
3,4 |
Кулиса, ползун |
В2 |
Вращательная |
4,5 |
Ползун, пуансон |
С |
Вращательная |
0,3 |
Стойка, кулиса |
D |
Поступательная |
0,5 |
Стойка, пуансон |
1.3 Определение числа степеней свободы механизма
1.3.1 Определяем число степеней свободы механизма по формуле Чебышева:
W=3·n – 2·p5 – p4 = 3·5 – 2·7 = 1, (1.1)
где: n – число подвижных звеньев механизма,
p5 – число кинематических пар 5-ого класса,
p4 – число кинематических пар 4-ого класса.
Это означает, что для определения движения и положения звеньев механизма необходимо задать движение и положение одного (ведущего) звена.
1.4 Разложение механизма на структурные группы
Таблица 1.3 – Структурные группы механизма
Структурная группа, присоединяемая на 1-ом этапе |
Структурная группа, присоединяемая на 2-ом этапе |
Механизм 1-ого класса |
Класс - 2 Порядок - 2 Вид - ВПВ |
Класс - 2 Порядок - 2 Вид - ПВП |
|
Формула строения механизма:
2 Кинематический анализ рычажного механизма
2.1 Построение планов положения механизма
2.1.1 Планом механизма называется изображение кинематической схемы механизма, соответствующее определенному положению начального звена или начальных звеньев для механизмов с несколькими степенями свободы.
Для изображения механизма на чертеже выбираем масштабный коэффициент длины:
![]() ; (2.1)
; (2.1)
Определив масштабный коэффициент, произведем расчёт масштабных длин звеньев:
![]() ; (2.2)
; (2.2)
![]() мм;
мм;
![]() ; (2.3)
; (2.3)
![]() мм;
мм;
![]() ; (2.5)
; (2.5)
![]() мм;
мм;
На
отведенном поле чертежа наносим положения
шарниров O и B
и
расположение неподвижной направляющей
ползуна 5. Все дальнейшие построения
планов показаны на чертеже. Сначала
строим положение механизма, при котором
выходное звено 5 занимает крайнее левое
положение. Соответствующий угол поворота
кривошипа будем считать равным нулю.
Согласно законам движения звеньев
механизма строим положения ползуна 2,
кулисы 3, ползуна 4 и центров масс звеньев
![]() .
.
Произведя построение первого плана положений, поворачиваем кривошип 1 на угол 30º по траектории вращения (по часовой стрелке) и выполняем соответствующее построение для 11 планов положений по аналогии с построением нулевого плана положений, описанного выше.