

Контрольные вопросы
В каких случаях применяют ПИД–регулятор?
Представьте принципиальную схему ПИД–регулятора.
Каким образом на практике реализуют ПИД–регулятор
К какому классу регуляторов относится ПИД–регулятор?
Лабораторная работа № 7
Преобразования структурных схем
Цель работы: Освоить правила преобразования структурных схем .
Преобразование структурных схем используется при получении эквивалентной передаточной функции системы.
Пример. Преобразовать структурную схему, представленную на рис. 7.1, а.
После переноса первого сумматора между звеньями с передаточными функциями W2 и W3, и выполнения связанных с этим изменений в схеме, получим новую структурную схему (см. рис. 7.1, б).
После пошагового выполнения преобразований с параллельно и последовательно соединенными звеньями, а также преобразования схемы со встречно-параллельным соединением звеньев получим эквивалентную структурную схему (см. рис. 7.1, в).
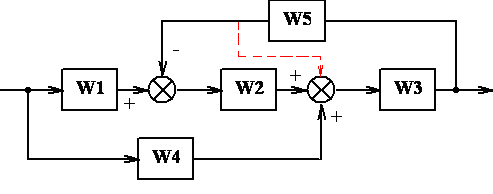
а
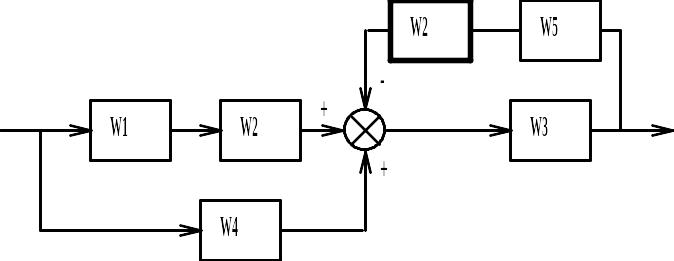
б
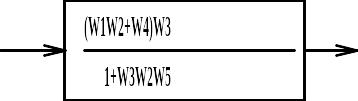
в
Рисунок 7.1. Этапы преобразования структурной схемы
Варианты задания
Преобразовать структурную схему на рис. 7.2 и привести эквивалентную передаточную функцию при
 ,
,
 ,
W3 = K3,
W4 = K4,
W5 = 1/p,
W6 = K6,
W7 = K7.
,
W3 = K3,
W4 = K4,
W5 = 1/p,
W6 = K6,
W7 = K7.Преобразовать структурную схему на рис. 7.2 и привести эквивалентную передаточную функцию при , W2 = K2,
 ,
W4 = K4,
W5 = 1/p,
W6 = K6,
W7 = K7.
,
W4 = K4,
W5 = 1/p,
W6 = K6,
W7 = K7.Преобразовать структурную схему на рис. 7.2 и привести эквивалентную передаточную функцию при , , ,
 ,
W5 = K5,
W6 = 1/p, W7
= K7.
,
W5 = K5,
W6 = 1/p, W7
= K7.
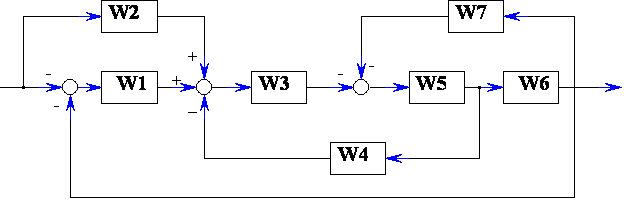
Рисунок 7.2
Преобразовать структурную схему на рис. 7.3 и привести эквивалентную передаточную функцию при , , W3 = K3, W4 = K4,
 .
.Преобразовать структурную схему на рис. 7.3 и привести эквивалентную передаточную функцию при , W2 = K2,
 ,
W4 = K4,
,
W4 = K4,
 .
.Преобразовать структурную схему на рис. 7.3 и привести эквивалентную передаточную функцию при
 ,
,
 ,
,
,
,
 ,
,
 .
.
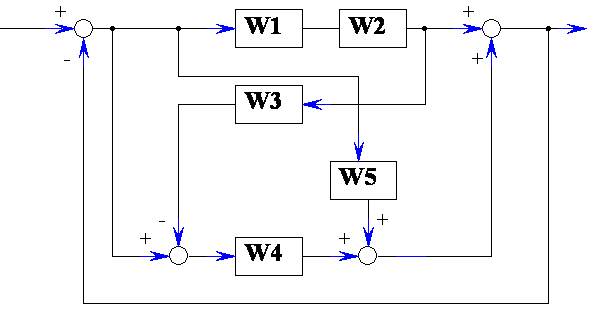
Рисунок 7.3
Преобразовать структурную схему на рис. 7.4 и привести эквивалентную передаточную функцию при , W2 = K2, , W4 = K4.
Преобразовать структурную схему на рис. 7.4 и привести эквивалентную передаточную функцию при , , , .
Преобразовать структурную схему на рис. 7.4 и привести эквивалентную передаточную функцию при , , W3 = K3, W4 = K4.
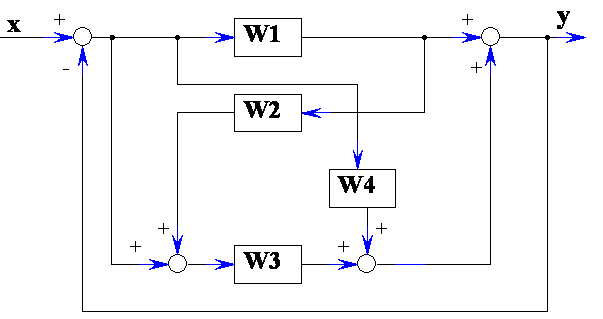
Рисунок 7.4
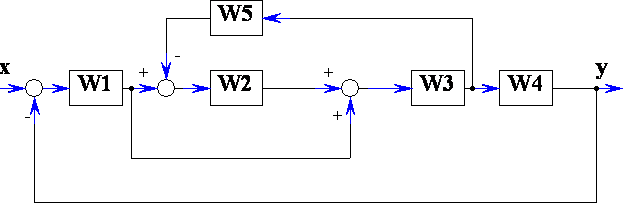
Рисунок 7.5
Преобразовать структурную схему на рис. 7.5 и привести эквивалентную передаточную функцию при , W2 = K2, , W4 = K4, W5 = K5.
Преобразовать структурную схему на рис. 7.5 и привести эквивалентную передаточную функцию при , W2 = 1/p, , W4 = p, W5 = K5.
Преобразовать структурную схему на рис. 7.5 и привести эквивалентную передаточную функцию при ,
 ,
,
 ,
W4 = K4,
W5 = K5.
,
W4 = K4,
W5 = K5.Преобразовать структурную схему на рис. 7.5 и привести эквивалентную передаточную функцию при
 ,
W2 = p,
,
W2 = p,
 ,
W4
= 2, W5 = 4.
,
W4
= 2, W5 = 4.
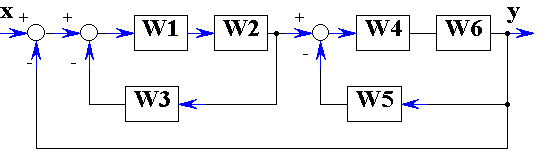
Рисунок 7.6
Преобразовать структурную схему на рис. 7.6 и привести эквивалентную передаточную функцию при
 ,
W2
= K2,
W3
= K3,
,
W5
= K5,
W6
= K6.
,
W2
= K2,
W3
= K3,
,
W5
= K5,
W6
= K6.Преобразовать структурную схему на рис. 7.6 и привести эквивалентную передаточную функцию при W1 = K1, , W3 = K3, , W5 = K5,
 .
.Преобразовать структурную схему на рис. 7.6 и привести эквивалентную передаточную функцию при , W2 = K2, , W4 = 2, W5 = 4, .
Преобразовать структурную схему на рис. 7.7 и привести эквивалентную передаточную функцию при , W2 = K2, W3 = K3, , W5 = K5, N – нелинейное звено.
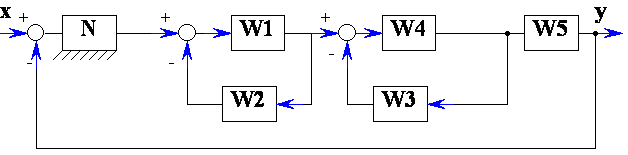
Рисунок 7.7
Преобразовать структурную схему на рис. 7.8 и привести эквивалентную передаточную функцию при , W2 = K2, W3 = K3, , W5 = K5, N – нелинейное звено.
Преобразовать структурную схему на рис. 7.8 и привести эквивалентную передаточную функцию при , W2 = K2, , W4 = K4, W5 = K5, N – нелинейное звено.
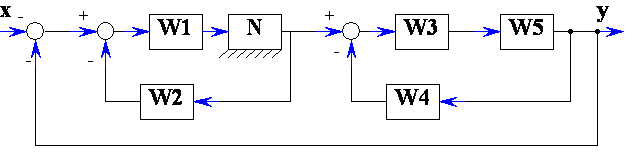
Рисунок 7.8
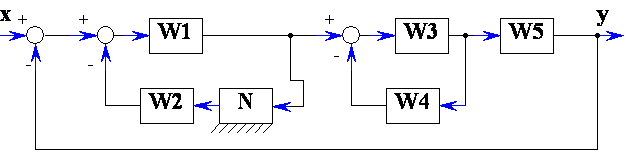
Рисунок 7.9
Преобразовать структурную схему на рис. 7.9 и привести эквивалентную передаточную функцию при , W2 = K2, W3 = K3, , W5 = K5, N – нелинейное звено.
Преобразовать структурную схему на рис. 7.9 и привести эквивалентную передаточную функцию при , W2 = K2, , W4 = K4, W5 = K5, N – нелинейное звено.
Преобразовать структурную схему на рис. 7.9 и привести эквивалентную передаточную функцию при , W2 = K2,
 ,
W4
= K4,
W5
= K5,
N
– нелинейное звено.
,
W4
= K4,
W5
= K5,
N
– нелинейное звено.
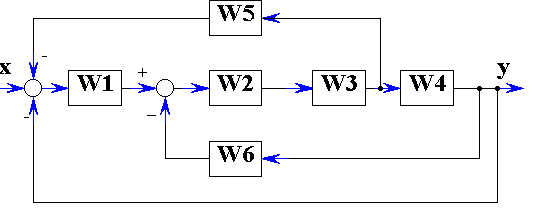
Рисунок 7.10
Преобразовать структурную схему на рис. 7.10 и привести эквивалентную передаточную функцию при W1 = K1, , W3 = K3, , W5 = K5, W6 = K6.
Преобразовать структурную схему на рис. 7.10 и привести эквивалентную передаточную функцию при , W2 = K2, W3 = K3, , W5 = K5, W6 = K6.
Рекомендуемая литература
Алексеев А.А., Имаев Д., Х., Кузьмин Н.Н., Яковлев В.Б. Теория управления. Учеб. - СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 1999. – 435 с.
Теория автоматического управления: Учеб. пособие для вузов /Анхимюк В.Л., Опейко О.Ф., Михеев Н.Н. - Минск: Дизайн ПРО, 2000. - 351 с.
Методы классической и современной теории автоматического управления : Учеб.: В 3 т. /ред. Егупов Н.Д., - М.: Изд-во МГТУ, 2000. – 747 с.
Теория автоматического управления: Учеб. для вузов /Брюханов В.Н., Косов М.Г.,
Протопопов С.П. и др.,, ред. Соломенцев Ю.М. - М.: Высш. шк., 2000. - 268 с.
Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. – М.: Наука. 1975, 318 с.
Борцов Ю.А. Математические модели автоматических систем/ ЛЭТИ. – Л., 1981.
Зайцев Г.Ф. Теория автоматического управления и регулирования. – М.: Высшая школа, 1988 – 431 с.
Иванов А.А. Теория автоматического управления и регулирования/ Недра, 1970.
Изерман Р. Цифровые системы управления. – М.: Мир. 1988 .- 216 с.
Лукас В.А. Теория автоматического управления. Учеб. М. Недра, 1990. – 416 с.
Теория автоматического управления / под. Ред. Воронова А.А. – М.: Высшая школа, 1986 – 538 с.
Теория автоматического управления / под ред. Нетушила А.В. – М.: Высшая школа. 1988. – 488 с.
Методические указания по применению в учебном процессе диалогового пакета прикладных программ машинного анализа и синтеза систем в среде MASS для студентов электротехнических специальностей. Составители: Е.М.Васильев, Ю.Н. Хижняков, Пермь, 1990.
Солодовников В.В., Плотников В.Н., Яковлев А.В. Основы теории и элементы систем автоматического регулирования. – М.: Машиностроение, 1985. – 195 с.
Сборник задач по теории автоматического регулирования и управления. 5-е изд. перераб. и доп. / Под ред. В.А. Бесекерского. – М.: Наука, 1978.
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Пермский государственный технический университет
Лысьвенский филиал
Лабораторная работa
по информатике
Тема «»
Выполнил студент ______________________________________________ И.О. Фамилия
подпись, дата
Группа Э-08-1
Направление 150900 «Технология, оборудование и автоматизация машиностроительных производств»»
Преподаватель _________________________________________________ И.О. Фамилия
подпись, дата
Лысьва, 2008
Жесткая обратная связь действует как в установившемся режиме, так и в переходном процессе.
Гибкая обратная связь действует только во время переходного процесса.
Положительной называется обратная связь, которая с увеличением сигнала на выходе элемента передает на его вход воздействие, вызывая при этом последующее увеличение выходного сигнала.
Отрицательной называется обратная связь, которая с увеличением сигнала на выходе элемента передает на его вход воздействие, вызывая при этом уменьшение выходного сигнала.