2.1 Загальні відомості про геометрію різця.
Прохідний токарний різець (рис. 2.1) згідно з ГОСТ 25751-83 складається з закріплювальної частини (L1) - що несе на собі всі складові різця, слугує для установки його до відповідного пристосування на верстаті та ріжучої частини (L2) – за допомогою якої здійснюється проникнення в тіло заготовки та видалення слою матеріла.
-

Рисунок - 2.1
Конструктивні параметри прохідного різця
1 - передня поверхня; 2 - головна задня поверхня; 3 - головна ріжуча кромка; 4 - допоміжна ріжуча кромка; 5 - допоміжна задня поверхня; 6 - вершина різця.
L1 - частина корпусу для базування та закріплення; L2 - ріжуча частина.
Ріжуча частина має форму клина. На ріжучій частині розрізняють: передню поверхню (1) по якій сходить стружка; головну задню поверхню (2), яка при точінні спрямована до поверхні різання; головну ріжучу кромку (3), що утворена лінією перетину передньої і головної задньої поверхні і утворює поверхню різання; допоміжну ріжучу кромку (4), яка утворена лінією перетину передньої і допоміжної задньої поверхні; допоміжну задню поверхню (5), яка спрямована до обробленої поверхні; вершину різця (6) - точку перетину головної і допоміжної ріжучих кромок і усіх трьох поверхонь що їх утворюють: передньої, головної задньої та допоміжної задньої.
2.2 Системи координат.
Інструментальна система координат (ИСК) – це прямокутна система координат з початком у вершині леза (рисунок. 2.2), орієнтована до геометричних елементів різця, прийнятих за базу. Наприклад, основна площина завжди паралельна опорній площинці різця Рnи і перпендикулярна головному робочому рухові, а напрямок осі Y співпадає з повздовжнім положенням державки.
|
Рисунок. 2.2 Інструментальна система координат
Pv - основна площина; X,Y,Z - координатні осі відносно вершини леза - О |

Інструментальна система координат застосовується для виготовлення й контролю інструментів.
Статична система координат (ССК) – це прямокутна система з початком у розглянутій точці ріжучої кромки, орієнтована щодо напрямку швидкості головного руху різання V. Статична система координат найбільше застосовується в практиці. Ця система дозволяє ігнорувати вплив швидкості подачі Vs на величину результуючої швидкості Ve, тому вся система й зорієнтована щодо вектора швидкості головного руху V (мал. 2.3).
|
Рисунок - 2.3 - Статична система координат
Pv - статична основна площина; Pn - статична площина різання; V - швидкість головного руху Dr.
|
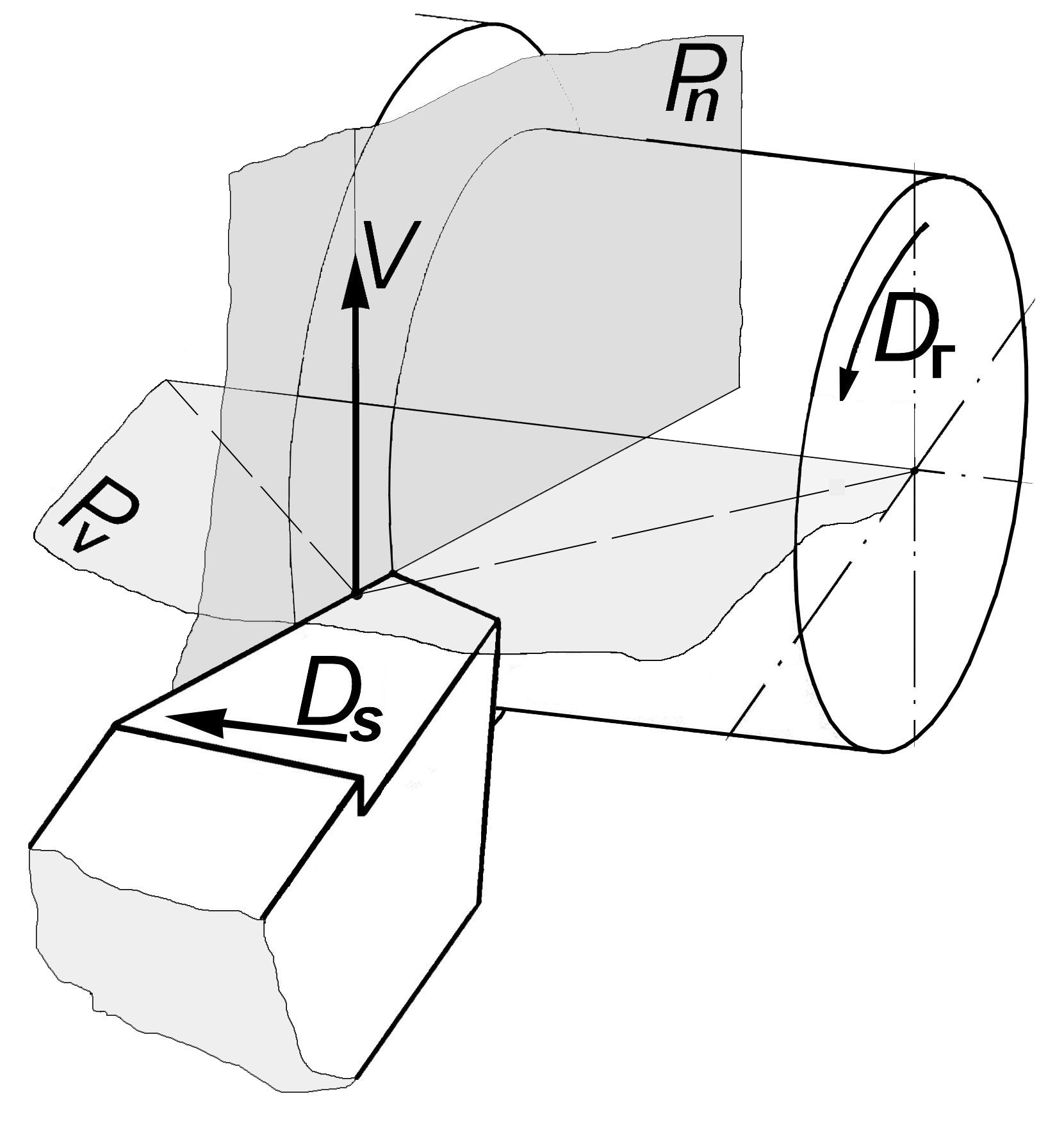
Статична система координат застосовується для наближених розрахунків кутів леза в процесі різання й для обліку зміни цих кутів, після установки інструмента на верстаті. Є перехідною від інструментальної системи координат до кінематичної.
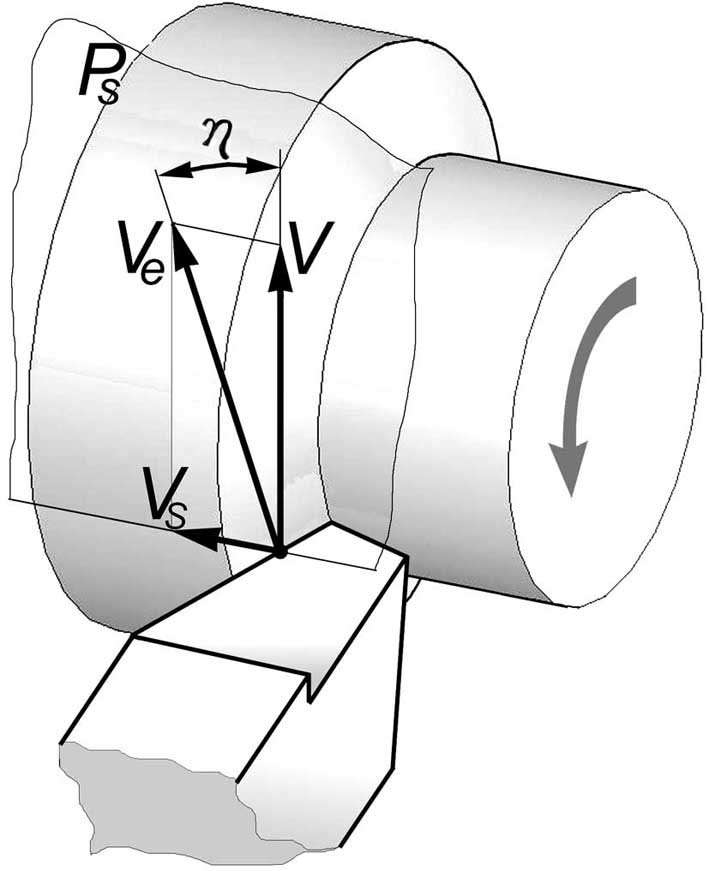
Кінематична система координат (КСК) – це прямокутна система з початком у розглянутій точці ріжучої кромки, орієнтована щодо напрямку швидкості результуючого руху різання Ve (мал. 2.4).
Кінематична система координат застосовується для точних аналітичних розрахунків. Кінематична робоча площина різання (Ps) і статична робоча площина співпадають.
|
Рисунок - 2.4- Кінематична система координат
Ps - кінематична робоча площина різання; Ve - результуюча швидкість; V - швидкість головного руху; Vs - швидкість руху подачі.
|