

3 Семестр. Аэронавигация. Лекции.
Маневрирование в Районе аэродрома.
Общая характеристика навигации в районе аэродрома.
Район аэродрома (РА) –это воздушное пространство над прилегающей территорией к аэродрому , предназначенная для вылета, снижения и захода на посадку.
Границы аэродрома, обычно, задаются координатами точек.
Район аэродрома ограничен и по высоте.
Особенности навигации в районе аэродрома:
Высокая плотность воздушного движения
Большое колличество пересекающихся маршрутов
Маневрирование выполняется не только в горизонтальной плоскости, но и по высоте.
Изменение приборной и вертикальной скоростей.
Близость земли и препятствий.
Дефицит времени у экипажа.
Более высокая оснащенность РТС (Радио-технических средств)
Более жесткие требования к точности выдерживания траектории.
Во вне аэродромном воздушном пространстве траектория задается в виде маршрута полета (ППМ и ЛЗП) и заданных высот.
Для полетов в районе аэродромов устанавливаются процедуры для полетов по приборам.
IFP- Instrument flight procedures.
Процедура- это последовательность действий экипажа при выполнении маневрирования.Она всегда может быть выражена словами, а для наглядности может быть изображена графически на карте в сборнике аэронавигационной информации.
В районе аэродрома устанавливаются процедуры:
- вылета ( departure procedures)
- прибытия ( arrivale procedures )
- захода на посадку ( approach procedures )
- ухода на второй круг ( missed approach procedures )
-полета в зоне ожидания ( holding procedures )
Кроме того могут быть установлены аварийные процедуры, например на случай отказа двигателей при взлете, потере радиосвязи, а так-же специальные процедуры. ( Например для снижения шума, тренировочных полетов и т.д. )
В международной практике процедуры разрабатываются в соответсвии с документами ИКАО.
Procedures for Airnavigation Services
Aircraft Operations
Правила аэронавигационного обслуживания. Производство полетов ВС.
Doc.8168. PANS OPS.
Том I Правила полетов.
Том II Построение схем визуальных полетов и полетов по приборам.
Этот документ посвящен построению заданных траекторий для предотвращения столкновений ВС с препятствиями.
В Росии на протяжении многих 10-ти летий схемы маневрирования не соответствовали международным требованиям.
Например, использовались такие схемы захода на посадку как:
Большой и малый прямоугольный маршрут.
Отворотом на расчетный угол.
Заход с прямой.
Стандартный разворот.
Основным недостатком этих схем было отсутствие наведения.
В 1994 году было введено в действие «Руководство по построению аэродромных схем и определение безопасных высот полета ,...» которая основанна на принципах PANS OPS, но не полностью и в сокращенном варианте.
До настоящего времени работа по построению правильных схем в России не завершена.
Процедуры в районе аэродрома могут быть основаны на использовании традиционных средств или основаны на использовании зональной навигации.
Процедуры зональной навигации могут использоваться только ВС имеющие оборудование зональной навигации и в бортовой базе которых эти процедуры закодированны.
Контрольные точки и способы их задания.
Если процедура предусматривает выполнение полетов по определенной траектории, то эта траектория задается путем установления контрольных точек (КТ) и высот их пролета.
Контрольные точки – waypoints (WP).
Контрольная точка должа удовлетворять двум условиям:
Обеспечивается наведение -на или -от КТ
Имеется возможность зафиксиовать пролет КТ, желательно с помощью бортовых средств.
При использовании традиционных средств основными способами задания КТ является следующее:
1)Маркированные КТ , т.е. точки в которых установленно радио-навигационное средство.
2)КТ заданные по пересечению пеленга.
Наведение обеспечивается с помощью средства находящегося на линии пути, а пролет контрольной точки фиксируется по достижению указанного на карте пеленга от бокового угломерного средства.
3)КТ заданны по пересечению дальности от дальномерного средства.
Для маршрутов зональной навигации КТ задаются географическими координатами, которые хранятся в бортовой базе данных.
В районе аэродрома
КТ могут быть как
![]() fly-over , так
и
fly-over , так
и
![]() fly-by.
fly-by.
Этапы полета.
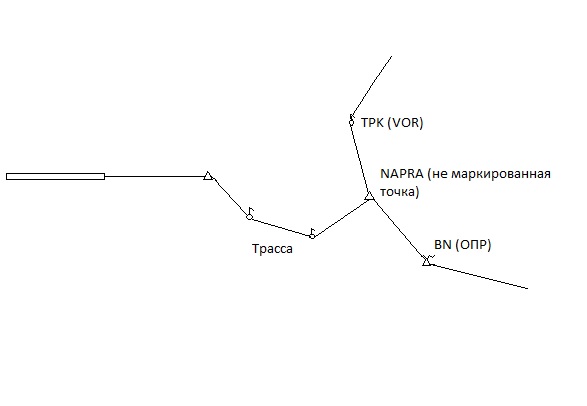
- Вылет (departure)- этап полета, который связывает ВПП взлета с точкой на опубликованном маршруте ОВД.
- Полет по маршруту (en-route flight)
-Прибытие (arrival)- связывает точку на маршруте ОВД с точкой в которой может быть начат маневр для захода на посадку.
Точка называется IAF- initial approach fix. (КТН- Контрольная точка начального этапа захода на посадку.)
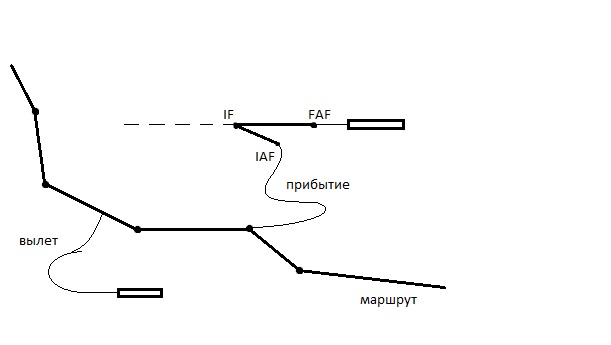
Рис. 1.1
Заход на посадку включает в себя:
Начальный этап
Промежуточный этап
Конечный этап
Каждый этап начинается в точке с соответствующим названием.
IF- intermediate fix (КТП- КТ промежуточного этапа)
IF находится на предпосадочной прямой, примерно там где на нее выходит ВС.
Начальный этап захода между IAF и IF предназначен для вывода ВС на предпосадочную прямую и по старой терминологии назывался «заход на посадку».
FAF- final approach fix (КТК- КТ конечного этапа захода на посадку)
На промежуточном этапе (IF до FAF) ВС выравнивается на предпосадочной прямой, гасит скорость, выпускает механизацию и т.д.
Конечный этап заканчивается посадкой или уходом на 2-ой круг.
Этап ухода на 2-ой круг, который завершается в точке с которой может быть начат повторный заход или полет на запасной аэродром.
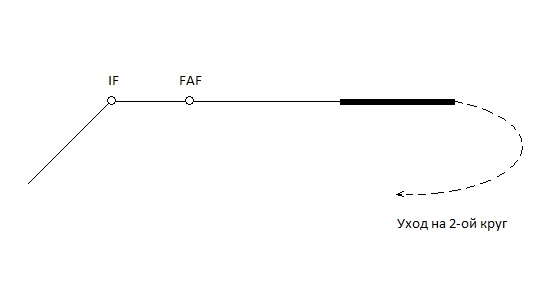
Рис. 1.2.
Практически в любом месте данной схемы может быть установленна процедура полета.
Для каждого из перечисленных этапов установленны свои требования, а перечисленные процедуры отображаются на разных картах сборника аэронавигационной информации.
Вылет (departure chart )
Маршрут ( En-route chart )
Прибытие ( Arrival chart )
Заход на посадку и уход на 2-ой круг ( Approach chart )
Основные сведения о процедурах вылета.
Вылет связывает ВПП взлета с точкой обслуживания воздушного движения.
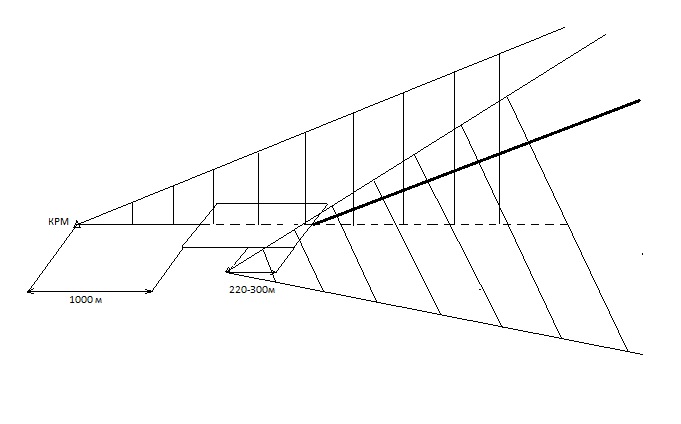
При вылете безопасность от столкновения с препятствиямия обеспечивается путем соблюдения установленного градиента набора высоты.
Градиент- это тангенс угла наклона траектории выраженный в процентах.
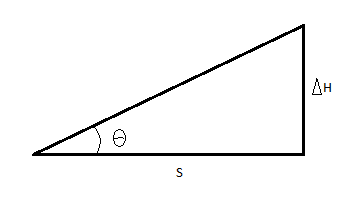 Рис.
1.3.
Рис.
1.3.


G = 3% (фт., мили)
В конце свободной зоны на аэродроме , на H=5м начинается наклонная поверхность с градиентом 2,5%
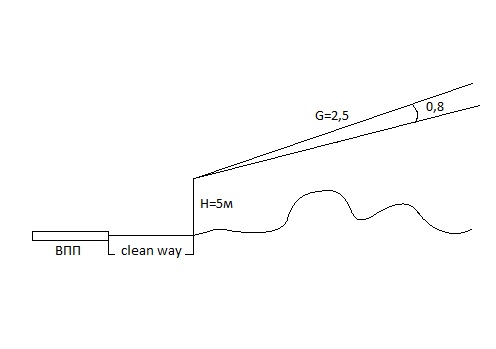
Рис. 1.4.
Препятствия попадающие в зону учета препятствий не должны пересекать эту поверхность. Запас высоты над препятствиями устанавливается в виде дополнительного градиента 0,8%.
Полученный таким образом градиент 3,3% является минимальным допустимым градиентом при вылете.
Если установлен такой стандартный градиент, то он на схеме не публикуется.
Если препятствия пересекают поверхность, то устанавливается повышенный градиент, который обязательно публикуется на схеме.
Повышенный градиент может ограничить максимально допустимую взлетную массу.
В горизонтальной плоскости с маршрутом вылета связаны зоны учета препятствий, которые имеют переменную ширину, обычно расширяясь по мере удаления от средств обеспечивающих наведение.
Любая процедура вылета начинается с набора высоты по прямой с курсом взлета.
Различают вылеты с разворотом на Hзад и с разворотом в заданной точке разворота.
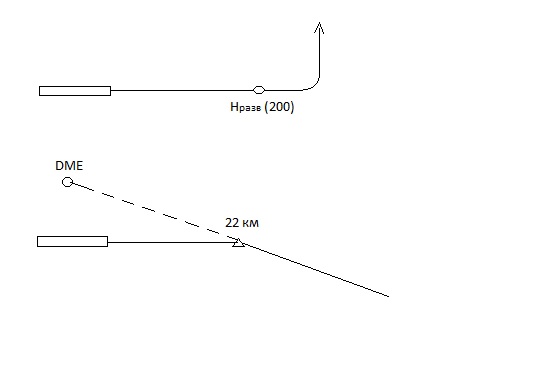
рис.1.5.
Если позволяет местность и интенсивность движения на высоте могут быть установленны процедуры вылета по любому направлению.
В этом случае после 1-го разворота выполняется разворот в нужную точку на трассе.
В аэропортах с высокой интенсивностью движения чаще устанавливают стандартные маршруты вылета которые подразумевают полет по определенной траектории.
SID- standard instrument departure.
Процедура вылета на карте не только изображается графически, но и описывается словами. Процедура должна иметь обозначение которое используется при радиосвязи, на карте и в бортовой базе данных.
Существуют международные правила присвоения обозначения процедуры.
Обозначение включает в себя : Основное слово, цифру и букву.
Основное слово должно являться обозначением точки на трассе в которой заканчивается вылет.
Буква обозначает конкретный SID из множества тех, которые заканчиваются в этой точке.
Цифра обозначает временную версию процедуры и измеряется от 1 до 9 при каждом ее изменении.
Прибытие связывает точку на трассе с точкой IAF. Может устанавливаться прибытие с любого направления, но чаще устанавливают стандартный маршрут прибытия.
STAR- standart terminal arrival
Обозначение STAR присваивают аналогично SID, но основным словом является обозначение точки на трассе где начинается STAR.
Системы посадки.
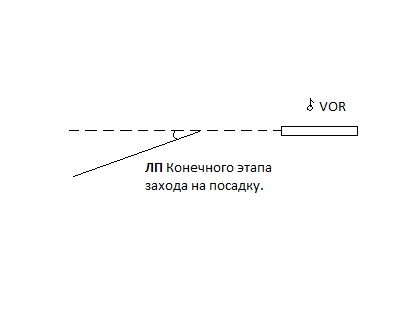
Конечный этап захода на посадку начинается с FAF. На этом этапе производится снижение по глиссаде, по линии пути конечного этапа захода на посадку. Направление этой линии не обязательно совпадает с осевой линией ВПП.
ВС делятся на категории в зависимости от классификационной скорости.
Классификационная скорость - это скорость которая на 30% превышает скорость сваливания при максимально допустимой посадочной массе. Она же совпадает со скоростью захода на посадку.
Категории обозначаются латинскими заглавными буквами.
Категория |
Классификация скоростей |
A |
˂ 160 км\ч |
B |
170-223 км\ч |
C |
224-260 км\ч |
D |
261-306 км\ч |
E |
307-390 км\ч |
Для каждой категории ВС разрабатываются свои категории, но как правило, они объединяются.
Глиссада- это установленный профиль снижения при конечном этапе захода на посадку.
Глиссада устанавливается таким образом, чтобы она проходила на высоте не меньше 15 метров над порогом ВПП.
Угол наклона глиссады (УНГ) зависит от препятствий и устанавливается в пределах от 230’ до 4 (в исключении до 5).
УНГ больше чем 310’ соответствует крупным глиссадам, которые накладывают ряд ограничений.
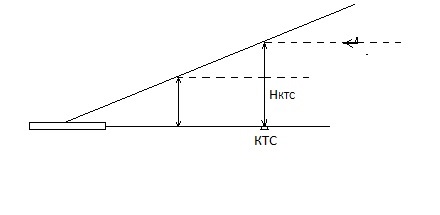
На конечном этапе захода на посадку могут быть установленны контрольные точки ступенчатого снижения (КТС, stepfix). Это точки до пролета которых не допускается снижение ниже установленной высоты пролета этой точки.
Наведение на конечном этапе захода на посадку обеспечивается радиотехническими средствами называемыми средствами или системами посадки, а так-же может быть обеспеченно с помощью оборудования зональной навигации.
Могут использоваться следующие виды системы посадки:
Радиомаячные системы (ils, «Катет» рсбн)
Система включает в себя курсовой и глиссадный радиомаяки (КРМ и ГРМ).
КРМ (localizer) работает в том же диапазоне частот что и VOR и с помощью 2-х диаграмм направленности создает в пространстве равносигнальную зону задающую плоскость курса.
ГРМ (glide slope transmitter) работает на частотах от 329-335 МГц и аналогичным образом задает в пространстве наклонную плоскость глиссады.
Бортовое оборудование работающее с РМС, например «Курс-МП», позволяет экипажу непрерывно определять отклонение от курса и глиссады.
На приборе типо ПНП (плановый навигационный прибор) или аналогичным , вертикальная и горизонтальная планки показывают положение курса и глиссады.
ILS так-же может включать в себя дальномерный маяк DME.
Так-же могут быть установленны маркерные радиомаяки (МРМ), которые предназначенны для фиксирования пролета точек в которых они установленны.
МРМ излучают радиоволны вверх в пределах параболического конуса.
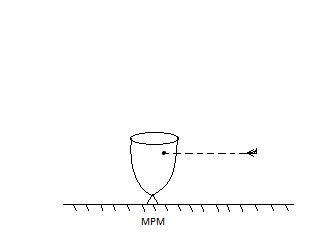
При попадании ВС в конус, на борту раздается звуковой сигнал.
ILS может включать в себя три маркера установленных на предпосадочной прямой.
Внешний маркер (Outer marker), 7км от порога ВПП.
Средний маркер (Middle marker), 1км от порога ВПП.
Внутренний маркер (Inner marker), 50-100метров от порога ВПП.
При наличии на борту соответствующего оборудования, заход на посадку по РМС может выполняться в следующих режимах :
Штурвальный режим ( ПСП- прибор системы посадки )
Планки показывают отклонение по курсу и глиссаде.
Директорный режим (ПКП)
Система директорного управления с учетом фактического курса ВС и вертикальной скорости формирует команды на отклонение рулей, которые индуцируются на пилотажно-командном приборе.
Автоматический режим
Команды автоматически реализуются бортовой системой автоматического управления.
Микроволновые системы посадки (mls- microwave landing system).
ВСТАВИТЬ ТЕКСТ
Основные виды заходов на посадку.
Ранее заходы на посадку и системы посадки классифицировались по двум видам:
Точные( precsison approach )
Неточные( non-precision approach )
К точным относились системы посадки, которые обеспечивали наведение как в горизонтальной плоскости (т.е. по курсу), так и в вертикальной ( по глиссаде ).
К неточным системам относились системы обеспечивающие наведение только в горизонтальной плоскости.
Точные и неточные заходы различаются по технологии действий пилота, при установлении визуального контакта с ВПП.
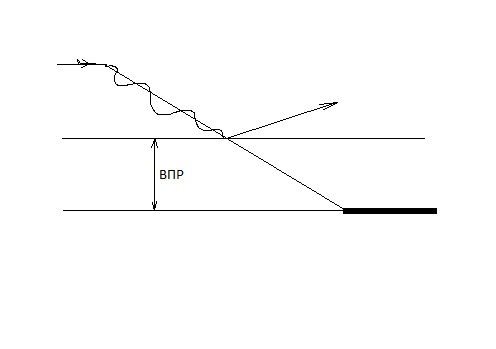
При точных заходах в качестве высотного параметра минимума аэродрома для посадки устанавливается высота принятия решения.
Desigion Height (по QFE)
Desigion altitude (по QNH)
Высота принятия решения (ВПР) – это высота на которой должен быть начат манёвр ухода на 2-ой круг, если до достижения этой высоты не был установлен необходимый визуальный контакт с ВПП или с ориентиром по курсу посадки или положение или параметры движения ВС не обеспечивают безопасной посадки.
Точный заход. (рис. )
При неточном заходе высотным параметром минимума является минимальная высота снижения.
Min decisiding altitude ( по QFE )
Min decisiding height ( по QNH )
Минимальная высота снижения (МВС) - это высота ниже которой нельзя снижаться до установления визуального контакта с ВПП.
Неточный заход.
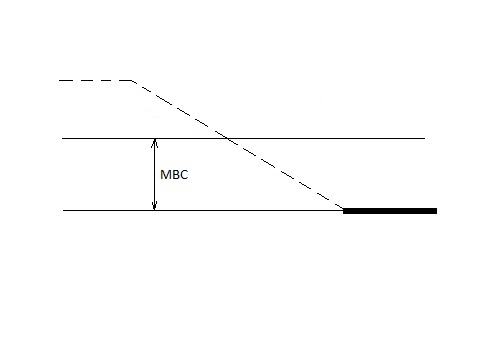
При неточных заходах наведения на высоте нет и поэтому, в общем случае, выдерживаение глиссады не требуется. Можно снижаться произвольным образом, но не ниже МВС.
При достижении МВС, если не установлен визуальный контакт, ВС переводится в горизонтальный полет.
В противном случае, если визуальный контакт не установлен или не обеспечивает безопасность посадки, уход на 2-ой круг должен быть начат не позже пролета установленной на аэродроме точки ухода на 2-ой круг. (ТУВК. MAPt - missed approach point)
Обычное положение этой точки вблизи порога ВПП. В принципе она задается любыми способами предназначенных для задания контрольных точек.
Наиболее часто задается
маркерными радиомаяками или по дальности
DME.
При использовании традиционных средств наведение обеспечивается радиоволнами излучаемыми от наземных РТС.