

Статические и динамические модели
Существенным признаком классификации моделей является их возможность описывать изменения параметров объекта во времени.
Статичный или динамичный характер системы (что отображается в модели) определяется в зависимости от целей моделирования. При построении модели основным является сравнение времени существенных изменений внешних воздействий и соответствующих характерных временных переходов объекта в новое равновесное состояние с окружающей средой и между элементами внутри системы.
В статической модели можно выделить важнейшие свойства и параметры (или сочетания), определяющие качество системы, не зависящие от времени (надежность, стоимость, долговечность и др.). В статической модели объект сохраняет состояние равновесия: параметры остаются постоянными при постоянных внешних воздействиях.
Модель называется статической, если среди параметров, участвующих в описании модели, нет временного параметра. Статическая модель в каждый момент времени дает лишь «фотографию» системы, ее срез.
Закон Ньютона F = ma — это статическая модель движущейся с ускорением а материальной точки массой т. Эта модель не учитывает изменение ускорения от одной точки к другой.
При таком подходе можно ставить оптимизационные задачи по критерию, выраженному этой функцией. В случае линейной целевой функции, линейных неравенств, линейной математической модели задачи технико-экономического содержания (например, распределение ресурсов) решаются как задачи линейного программирования.
Если изменения параметров во времени происходят столь медленно, что ними можно пренебречь, то такую модель называют квазистатической.
Модель динамическая, если среди параметров модели есть временной параметр, т. е. она отображает систему (процессы в системе) во времени.
В динамической модели от времени зависят независимые переменные (параметр процесса), неизвестные функции (фазовые переменные), характеризующие состояние системы (перемещения, скорости, ускорения элементов системы, силы и моменты, давление и расход жидкости в трубопроводе, напряжение и сила тока в электрической сети и др.).
Модель S = gtz/2 — динамическая модель пути при свободном падении тела. Динамическая модель типа закона Ньютона: F(t) = a(t)m(t). Еще лучшей формой динамической модели Ньютона является: F(t) = s"(t)m(t).
Динамические системы могут быть с дискретными состояниями (множество состояний конечно или счетно) или с непрерывным множеством состояний.
В детерминированных системах новое состояние зависит только от времени и текущего состояния системы. Если имеются условия, определяющие переход системы в новое состояние, то для детерминированной системы можно однозначно указать, в какое именно состояние она перейдет.
Для стохастической системы можно указать лишь множество возможных состояний перехода и, в некоторых случаях, - вероятностные характеристики перехода в каждое из этих состояний.
Основная форма динамической математической модели - дифференциальные уравнения.
Стационарные и нестационарные модели
Стационарные системы – такие системы, свойства которых не изменяются во времени.
Реакция стационарной системы на любой заданный тип возмущения зависит только от интервала времени между моментом начала действия входного возмущения и данным моментом времени, т.е. свойство стационарности означает, что процесс преобразования входных сигналов инвариантен относительно сдвига, как от текущего времени, так и от момента приложения входного сигнала. Реакция нестационарной системы зависит как от текущего времени, так и от момента приложения входного сигнала. В этом случае при сдвиге входного сигнала во времени (без изменения его формы) выходные сигналы не только сдвигаются во времени, но и изменяют свою форму.
Примеры стационарных моделей.
При ламинарном течении жидкости (скорость течения невелика) в длинной трубе постоянного сечения на достаточно большом удалении от входа частицы жидкости движутся параллельно оси трубы, и профиль скоростей частиц в сечении остается с течением времени неизменным – параметры модели не зависят от времени.
Термодинамическое равновесие обшивки самолета при полете в плотных слоях атмосферы. Обшивка, получая тепловую энергию от воздушного потока, одновременно излучает ее в окружающее пространство, в соответствии с законом Стефана-Больцмана тем больше, чем выше ее температура (εТ = σ Т4, εТ – интегральная излучательная способность – энергия излучения с единицы поверхности в единицу времени, σ – постоянная).
В общем случае состояние системы z (t) и выход системы y (t) являются функциями не только z (t0), и Хt0t, но и самого интервала t0t:
z (t) = α (t0t, z (t0), Хt0t); у (t) = β (t0t, z (t0), Хt0t).
При одних и тех же значениях z (t0), и Хt0t, перемещая по оси времени интервал t0t, можно получить различные значения z (t) и y (t).
Введем в рассмотрение оператор сдвига , применение которого к произвольной величине приводит к ее сдвигу вдоль оси времени на интервал .
Система называется стационарной, если для операторов перехода и выхода выполняются условия:
z (t) = α ( t0t, z (t0), Хt0t) = z (t);
у (t) = β ( t0t, z (t0), Хt0t) = у (t).
На рисунке 3.1 представлено второе из условий, согласно которому должно выполняться равенство у (t) = у (t).
Для стационарной системы модель функционирования можно записать в виде, независимом от t0t:
z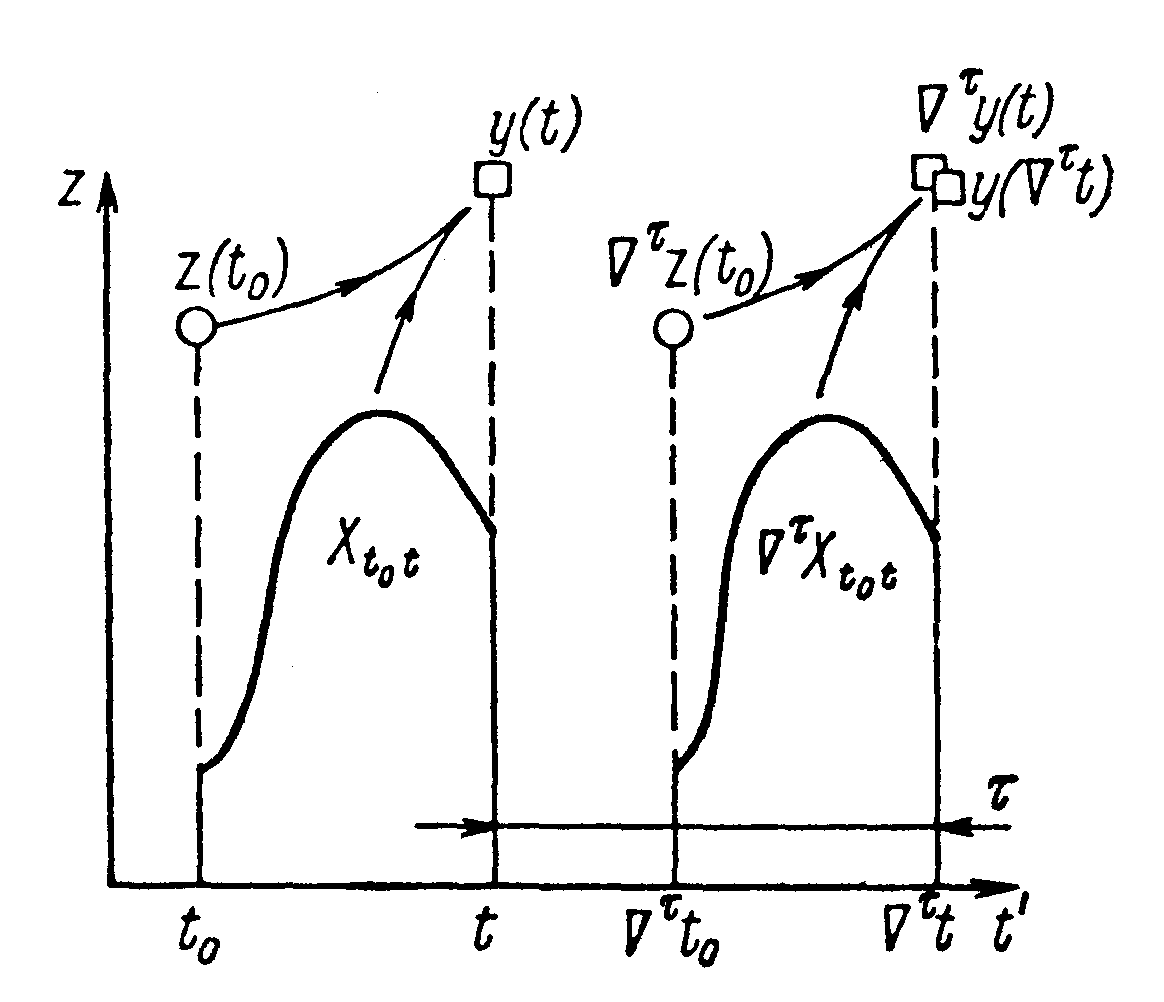 (t)
=
α (z (t0),
Хt0t);
у (t) =
β (z (t0),
Хt0t).
(t)
=
α (z (t0),
Хt0t);
у (t) =
β (z (t0),
Хt0t).
Стационарные модели применяются для описания различных потоков (жидкости, газа, тепла) в случае постоянства условий на входе и выходе потока.
В нестационарной модели время – одно из существенных переменных. Например, движение жидкости в трубе при изменении параметров на входе (изменение скорости при истечении жидкости из сосуда).
Стационарные математические модели описывают системы, в которых протекают так называемые установившиеся процессы – процессы, в которых интересующие нас параметры постоянны во времени.
К установившимся (стационарным) относят и периодические процессы, в которых некоторые выходные параметры остаются неизменными.
Например, математическая модель маятника является стационарной по отношению к независящим от времени периоду и полуразмаху колебаний, хотя материальная точка перемещается во времени относительно положения равновесия.
Частным случаем стационарных моделей являются модели статические, которые включают описание связей между основными переменными процесса в установившихся режимах (в равновесном состоянии без изменения во времени).
Например, математическое описание статики химико-технологического процесса состоит обычно из трех видов уравнений: материального и теплового балансов, термодинамического равновесия системы (характеристика движущей силы) и скоростей протекания процессов (химических реакций, тепло- и массопередачи и т.п.).
Для расчетов медленных процессов или процессов, протекающих с небольшими отклонениями от стабильных условий, принимается допущение, позволяющее считать процесс установившимся.
Подобное допущение принимается, например, для расчета теплового баланса турбины при половинной, трехчетвертной или полной нагрузке или для решения методами линейного программирования задачи смешения материалов.
Стационарные математические модели (кроме статических) обычно состоят из дифференциальных уравнений, статические – из уравнений алгебраических.