

6.2. Системы автоматического регулирования в лпм
■
В устройствах магнитной записи высокого качества к ЛПМ предъявляются жесткие требования, выполнение которых обеспечивает высокую достоверность воспроизведения записанной информации. К таким требованиям, прежде всего, относятся: стабильность скорости движения магнитной ленты и постоянство усилий, прилагаемых к ленте. Первое требование вызвано необ-
44
45
ходимостью точного воспроизведения спектрального состава записанного сигнала. Что касается стабилизации натяжения носителя, то при изменении усилий, растягивающих магнитную ленту, могут возникнуть две неприятности: изменится спектральный состав воспроизводимого сигнала, а при необратимых деформациях (растяжении) может быть нарушена и сама фонограмма. При этом даже на идеальном ЛПМ с такой ленты уже невозможно получить достоверного воспроизведения сигнала.
Исходя из сказанного выше, в ЛПМ чаще всего используют два типа систем автоматического регулирования:
система автоматического регулирования скорости движения магнитного носителя (САРС);
система стабилизации натяжения магнитного носителя (ССН).
6,3. СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ МАГНИТНОЙ ЛЕНТЫ (САРС)
Подобные системы строятся по классической схеме систем стабилизации. При этом задающим воздействием является высокостабильный по частоте периодический сигнал. Информация о фактической скорости движения магнитного носителя может быть получена двумя способами. Первый способ - измерение частоты вращения вала двигателя, осуществляющего протяжку ленты. Это не очень точный способ, так как стабильность частоты вращения двигателя лишь приблизительно отражает стабильность скорости движения ленты. Это связано с тем, что между лентой и валом двигателя не исключаются хотя бы незначительные пробуксовки, несмотря на наличие прижимного резинового ролика. Тем не менее, для аудиомагнитофонов даже высокого класса такой способ измерения скорости движения ленты вполне приемлем, ибо небольшие (сотые доли процента) детонации при прослушивании аудиозаписи неощутимы на слух. В более точных аппаратах, например устройствах видеозаписи, такой способ совершенно неприемлем, так как точность захода траектории магнитной головки на наклонную магнитную дорожку записи должна составлять десятки микрон при протяжке через ЛПМ сотен метров ленты. В этом случае необходимо измерять фактическую скорость движения ленты, для чего на специальную магнитную дорожку, расположенную по краю ленты, при записи наносится синхронизирующий сигнал от высокостабильного генератора. Частота этого сигнала в процессе воспроизведения пропорциональна скорости движения ленты.
На рис. 38 показан вариант функциональной схемы статической системы стабилизации скорости вращения тягового двигателя ЛПМ магнитофона.
Объектом регулирования является двигатель Д, на который поступают напряжение питания U2 и возмущающее воздействие М, которое представляет собой реакцию нагрузки на вал двигателя. Тахогенератор ТГ находится на одном валу с двигателем и вырабатывает гармонический сигнал, частота которого пропорциональна скорости вращения тахогенератора, а следовательно,
и двигателя. Сигнал с тахогенератора подается на частотный детектор ЧД, где частота со сравнивается с эталонной 0. Сигнал ошибки , с выхода частотного детектора усиливается усилителем У и, суммируясь с напряжением питания двигателя U0, поступает на клеммы двигателя. Таким образом, замыкается обратная связь.

Обратная связь в системе должна быть отрицательная, чтобы система была устойчива и подавляла нестабильность питающего напряжения (Уо и момента нагрузки М. Для этого полярность включения частотного детектора и усилителя выбираются так, чтобы уменьшение скорости вращения двигателя приводило к увеличению напряжения U1 в результате чего двигатель смог бы увеличить обороты.
-сумматор и инерционное звено
С![]() труктурная
схема системы показана на рис. 39, где
представлены следующие структурные
единицы:
труктурная
схема системы показана на рис. 39, где
представлены следующие структурные
единицы:
описывают частотный детектор;
.
-![]() усилитель
сигнала ошибки К2;
- возмущающее
воздействие U3
, пересчитанное
к входу двигателя;
усилитель
сигнала ошибки К2;
- возмущающее
воздействие U3
, пересчитанное
к входу двигателя;
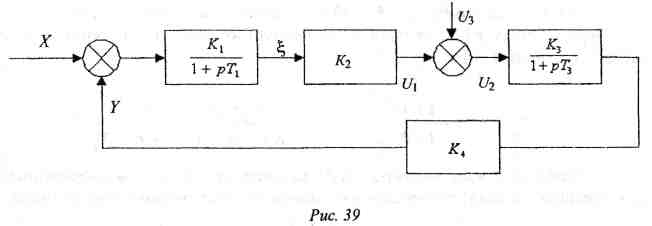
-тахогенератор К4.
46
47
![]()
щения двигателя). Инерционность вызвана наличием ФНЧ в структуре
частотного детектора. После усиления сигнала ошибки в усилителе К2 напряжение U1 складывается с дестабилизирующим воздействием U3 и поступает на
д![]() вигатель.
Инерционность двигателя вызвана
в основном механиче-
вигатель.
Инерционность двигателя вызвана
в основном механиче-
ской инерционностью ротора двигателя и ротора тахогенератора, находящихся на одном валу.
Данная система является статической, т.е. не может работать без ошибки как по управляющему воздействию х, так и по возмущающему воздействию U3. Действительно, запишем соответствующие передаточные функции:
Передаточная функция по ошибке от регулирующего воздействия
![]()
![]()
Где
Здесь К - коэффициент усиления разомкнутой системы по постоянному току (в статике) Отсюда:
Как известно из теории автоматического управления, наличие в числителе этого выражения свободного слагаемого 1 говорит о том, что система статическая. В установившемся режиме такая система дает ошибку регулирования по управляющему воздействию:
![]()
Это значит, что, например, при К = 99 ошибка составит один процент.
Передаточная функция ошибки по возмущающему воздействию записывается следующим образом:
![]()
При К >> 1 и, учитывая, что К= К1К2К3К4 получаем:
![]()
Следовательно, если к двигателю прикладывается тормозящий момент,
эквивалентный приложению дополнительного напряжения U3, то ошибка по
скорости будет такая, которая соответствует приложению к двигателю напря-
U3 жения ———.
K1K2
Таким образом, качество работы статической системы стабилизации скорости протяжки магнитной ленты не может быть сделано очень высоким. Для устройств точной магнитной записи необходимо использовать астатические системы стабилизации скорости.
Астатическая САРС
Рис. 40
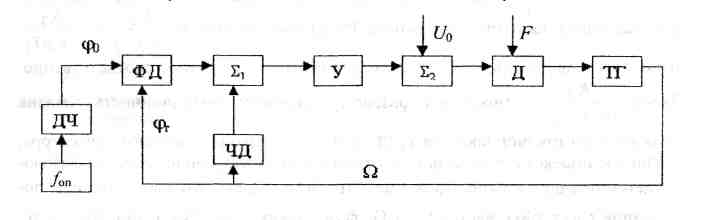
Функциональная схема одного из вариантов астатической системы стабилизации скорости магнитного носителя показана на рис. 40.
С равнивая
рис. 38 и 40, можно заметить, что у них
много общего. Фактически в схеме
рис.40 добавился еще один контур
регулирования, замыкающийся через
фазовый детектор ФД. Опорным сигналом
для ФД является сигнал с высокостабильного
генератора fon
проходящий
через делитель частоты ДЧ. Необходимость
деления частоты fоп
вызвана тем,
что частота, вырабатываемая
тахогенератором ТГ, сравнительно
низкая, в то время как высокостабильный
генератор, как правило, кварцованный,
работает на высоких частотах.
равнивая
рис. 38 и 40, можно заметить, что у них
много общего. Фактически в схеме
рис.40 добавился еще один контур
регулирования, замыкающийся через
фазовый детектор ФД. Опорным сигналом
для ФД является сигнал с высокостабильного
генератора fon
проходящий
через делитель частоты ДЧ. Необходимость
деления частоты fоп
вызвана тем,
что частота, вырабатываемая
тахогенератором ТГ, сравнительно
низкая, в то время как высокостабильный
генератор, как правило, кварцованный,
работает на высоких частотах.
Наличие второго контура регулирования позволяет повысить точность регулирования системы. В частности, можно свести точность слежения до постоянной фазы, что автоматически убирает ошибку по частоте. В этом случае ошибка регулирования на левом входе сумматора будет. Именно она и формирует управляющее воздействие. В то же время сигнал на нижнем входе сумматора может отсутствовать, так как частота будет точно равна требуемой. Ошибка по фазе будет, а ошибки по частоте не будет. Разумеется, это касается статики или очень медленного изменения U0 и F.
48
49
Структурная схема двухконтурной астатической системы стабилизации скорости ленты представлена на рис. 41.
Перенося точку приложения 0 на вход левого сумматора, получаем
окончательно структурную схему (рис. 43).
Рис. 43
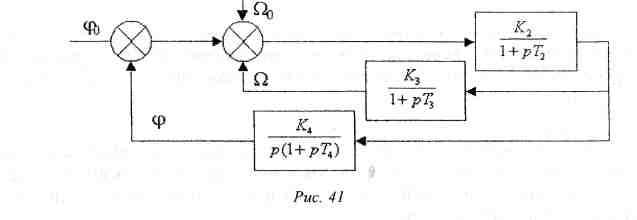
Левый сумматор относится к фазовому детектору и определяет разницу между текущей фазой напряжения тахогенератора и фазой 0 опорного сигнала.
Второй сумматор определяет разность частот тахогенератора и опорной частоты 0 которая требуется для идеального качества регулирования. Фактически частота 0 на частотный детектор не подается, она туда вводится
п![]() ри
настройке частотного детектора.
Инерционные звенья
ри
настройке частотного детектора.
Инерционные звенья
относятся к двигателю с усилителем и частотному детектору соответственно.
![]()
Звено относится к фазовому детектору. Инерционность вызвана
н![]() аличием
постоянной времени T4
RС-цепи
на выходе фазового детектора, а наличие
индекса p
в знаменателе отражает интегрирующие
свойства фазового детектора по
частоте:. Это, в
частности,
означает, что при постоянной расстройке
частот
и 0
фаза между ними будет линейно расти, а
это и есть интегрирование.
аличием
постоянной времени T4
RС-цепи
на выходе фазового детектора, а наличие
индекса p
в знаменателе отражает интегрирующие
свойства фазового детектора по
частоте:. Это, в
частности,
означает, что при постоянной расстройке
частот
и 0
фаза между ними будет линейно расти, а
это и есть интегрирование.
Т![]() ак
как , то .
Тогда схему рис. 41 можно преобра-
ак
как , то .
Тогда схему рис. 41 можно преобра-

Рис. 42
зовать, оставив лишь один источник опорного сигнала (рис. 42).
На рис. 43: U0 - напряжение питания двигателя; М - момент на валу двигателя.
И![]() зменение
(нестабильность) этих параметров может
быть причиной появления ошибки
регулирования. Дестабилизирующие
факторы U0
и M0
обозначим
как возмущающее воздействие F,
приложенное
ко входу звена
зменение
(нестабильность) этих параметров может
быть причиной появления ошибки
регулирования. Дестабилизирующие
факторы U0
и M0
обозначим
как возмущающее воздействие F,
приложенное
ко входу звена
. Запишем некоторые очевидные соотношения для рис. 43 и произве-
дем необходимые преобразования.
Для краткости записи обозначим:
![]()
х - входное воздействие,
у - результат регулирования,
- частотная ошибка регулирования (см. рис. 43)
Т![]() огда:
огда:
![]()
![]()
Подставляя передаточные функции звеньев и учитывая, что ошибка получаем после преобразований:
![]()
51
6.4. СИСТЕМА СТАБИЛИЗАЦИИ НАТЯЖЕНИЯ МАГНИТНОЙ ЛЕНТЫ
По принципу устройства все системы стабилизации натяжения делятся:
на системы с регулированием по возмущению;
системы с регулированием по отклонению.
Функциональная схема системы с регулированием по возмущению показана на рис. 44. Она отличается отсутствием обратной связи. В основу регулирования положено то обстоятельство, что с изменением радиуса намотки ленты на катушке для сохранения усилия, приложенного со стороны подающего узла, напряжение питания подтормаживающего двигателя необходимо менять. Действительно, для сохранения неизменного усилия, приложенного к ленте, например при увеличении радиуса намотки, вращающий момент двигателя надо увеличивать. Это значит, необходимо увеличивать напряжение на клеммах двигателя.
Тахогенераторы формируют гармонические сигналы с частотой, пропорциональной частоте вращения двигателей. Усилитель-ограничитель преобразует гармонический сигнал в прямоугольный, так как частоты, генерируемые тахогенератором, очень низкие и на таких частотах большинство известных частотных детекторов работает с прямоугольными сигналами.
Устройство работает следующим образом: чем быстрее вращается Д2, тем медленнее вращается Д1 а это значит, что увеличение частоты 2 преобразуется в большее напряжение U1 и момент на валу двигателя Д1 будет возрастать, что и требуется. Недостатком системы рис. 44 является отсутствие обратной связи. Как всякая система без обратной связи, она не сможет отрабатывать возможные возмущающие воздействия, такие, как нестабильность питающих напряжений, трение в катушечных накопителях, нелинейность характеристик элементов схемы и т.п.
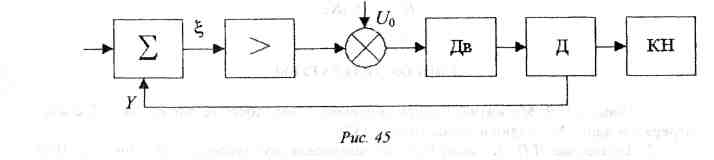
Более совершенной системой стабилизации напряжения магнитного носителя является система с обратной связью. В такой системе необходимо контролировать фактическое усилие натяжения ленты и в случае его изменения по каналу обратной связи вырабатывать воздействие на двигатель, направленное на уменьшение ошибки регулирования по натяжению. Функциональная схема системы стабилизации натяжения ленты построенной по принципу регулирования по отклонению, показанной на рис. 45.

Измерение радиуса намотки ленты на магнитных накопителях - задача хоть в принципе и решаемая, но довольно сложная. Гораздо проще судить о радиусе намотки ленты по угловой скорости движения катушки. При постоянной и заранее известной линейной скорости движения ленты уменьшение радиуса намотки будет соответствовать увеличению угловой скорости катушки магнитного накопителя. Для измерения угловой скорости можно использовать уже упоминавшийся ранее тахогенератор.
На рис. 44 обозначено: Д1, Д2 - двигатели подающего и приемного узлов соответственно; TГ1 и ТГ2 - тахогенераторы; Ред. - редуктор, понижающий угловую скорость; KH1 и КН2 - катушечные накопители левого и правого узлов соответственно; УМ - усилитель мощности; ЧД - частотный детектор; УО - усилитель-ограничитель.
52
На сумматор системы поступает сигнал х задающего воздействия и сигнал у с датчика Д, характеризующий фактическое натяжение носителя. Разница между этими сигналами сигнал ошибки) усиливается
усилителем и, складываясь с начальным напряжением питания двигателя U0, поступает на двигатель Дв данного катушечного накопителя КН (левого или правого). Изменение натяжение ленты фиксируется датчиком Д и по цепи обратной связи изменяет напряжение питания двигателя. Основным элементом данной системы, не встречающимся нам ранее, является датчик натяжения. Его можно выполнить самым различным способом. Проще всего использовать тензометри-ческие датчики, которые наклеиваются на гибкую упругую пластину, на которой закреплен ролик с лентой. Пластина встроена в состав лентопротяжного механизма таким образом, что при изменении натяжения пластина изгибается в большей или меньшей степени, а тензодатчики, закрепленные на ней, изменяют свое сопротивление и могут быть использованы как датчики величины
натяжения.
Структурная схема системы по рис. 45 изображена на рис. 46.
53

ошибки - передаточная функция двигателя; К3 - коэффициент пере-
дачи датчика натяжения; F — дестабилизирующее воздействие, вызванное нестабильностью питающих напряжений, трением в элементах лентопротяжного механизма и т.п.
Как видно из структурной схемы, в ней нет интегрирующих звеньев, следовательно, система статическая. Уменьшить ошибку регулирования в системе можно путем увеличения коэффициента усиления системы:
Сергей Евгеньевич Лявданский
СИСТЕМЫ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ИНФОРМАЦИИ
![]()
Конспект лекций
СПИСОК ЛИТЕРАТУРЫ
Гитлиц Н.В. Магнитная запись сигналов: Учеб. пособие для вузов. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 232 с.
Аполлоноеа Л.П., Шумова Н.Д. Механическая звукозапись. - М.: Энергия, 1972 -224 с.
Зайцев Г.Ф. и др. Автоматическое регулирование в магнитной записи. - Киев: Техника, 1979.-167 с.
Василевский Ю.А. Носители магнитной записи. - М.: Искусство, 1989. - 287 с.
Гордеев Л.С. Аппаратура точной магнитной записи. М.: Радио и связь, 1989. -232 с.
Котов Е.П., Руденко М.И. Ленты и диски в устройствах магнитной записи. - М.: Радио и связь, 1986. - 233 с.
Кононович Л.М., Ковельчин Ю.А. Стереофоническое воспроизведение звука. -М.: Радио и связь. 1981. - 185 с.
Лауфер М.В., Крыжановский И.А. Теоретические основы магнитной записи сигналов на движущийся носитель: Учеб. пособие для вузов. - Киев: Высшая школа, 1982.-270 с.
Козюренко Ю.И. Высококачественное звуковоспроизведение. - М.: Радио и связь, 1993.-140 с.
Бродкин В.М. Электропроигрывающие устройства. - М.: Энергия, 1980. - 127 с.
Бургов В.А. Физика магнитной звукозаписи. - М.: Искусство, 1973. - 495 с.
Редактор И. Л. Кескееич Технический редактор Г.Е. Телятникова
Лицензия № 021040 от 22.02.96. Подписано в печать 05.06.2000. Формат 60x84 1/16. Бумага офсетная. Тираж 100 экз. Уч.- изд. л. 3,2. Печ. л. 3,5. Изд. № 1411. Заказ № I/?/ . Цена договорная.
Отпечатано в типографии
Новосибирского государственного технического университета