

Датчики положения
Датчик положения исполнительного механизма ППМ (выход 4-20 мА)

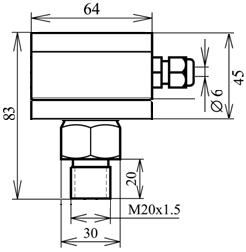
Рисунок 16-Датчик ППМ(выход 4-20 мА)
|
Назначение: Датчик положения исполнительного механизма ППМ(преобразователь положения исполнительного механизма) предназначен для непрерывного преобразования текущего значения сопротивления реостатного датчика положения исполнительного механизма в аналоговый сигнал постоянного тока 4-20 мА. Датчик используется в системах автоматизации технологических процессов совместно с контроллерами, имеющими аналоговый вход 4-20 мА, для дистанционного контроля положения и синхронизации работы исполнительных механизмов. |
Технические данные:
Напряжение питания |
16-36 В пост. тока |
Пульсация напряжения питания |
0,5% от ном. значения |
Выходной сигнал |
4-20 мА пост. тока |
Характеристика |
Дискретная |
Сопротивление нагрузки |
200 Ом |
Степень защиты корпуса |
IP54 по ГОСТ 14254 |
Способ присоединения внешних проводов сечением до 1 мм2 |
Под винт |
Габаритные размеры |
Не более 84х58х83 мм |
Масса |
Не более 0,2 кг |
Срок службы
|
Не менее 10 лет |
Преобразователь положения исполнительного механизма, 200 Ом, 4-20 мА ППМ ПМКЕ.405225.003ТУ
Устройство и принцип работы
Датчик состоит из герметичного магнитного контакта (геркона), магнита и простой электрической схемы, размещенных в металлическом корпусе.
Изменение положения подвижной части механизма вызывает изменение сопротивления его электрической схемы и преобразует его в аналоговый сигнал постоянного тока 4-20 мА.
Указания по эксплуатации
Окружающая среда не должна содержать агрессивных паров, газов, аэросмесей и быть взрывоопасной.
Пространственное положение датчика любое.
Датчик крепится к ровной поверхности с помощью двух шурупов или винтов М4.
Подключение датчика к реостату обратной связи исполнительного механизма осуществляется штатным кабелем.
 Рисунок
17-
Общий вид датчика ППМ
Рисунок
17-
Общий вид датчика ППМ
Общая схема системы размещения датчиков
Датчики используемые в производственном процессе необходимо разместить на следующих узлах и агрегатах, датчики температуры – непосредственно в повешении, камере парообработки и резервуаре с водой. Для обеспечения безопасности технологического процесса датчики положения установлены на линиях взаимодействия механизмов с персоналом.
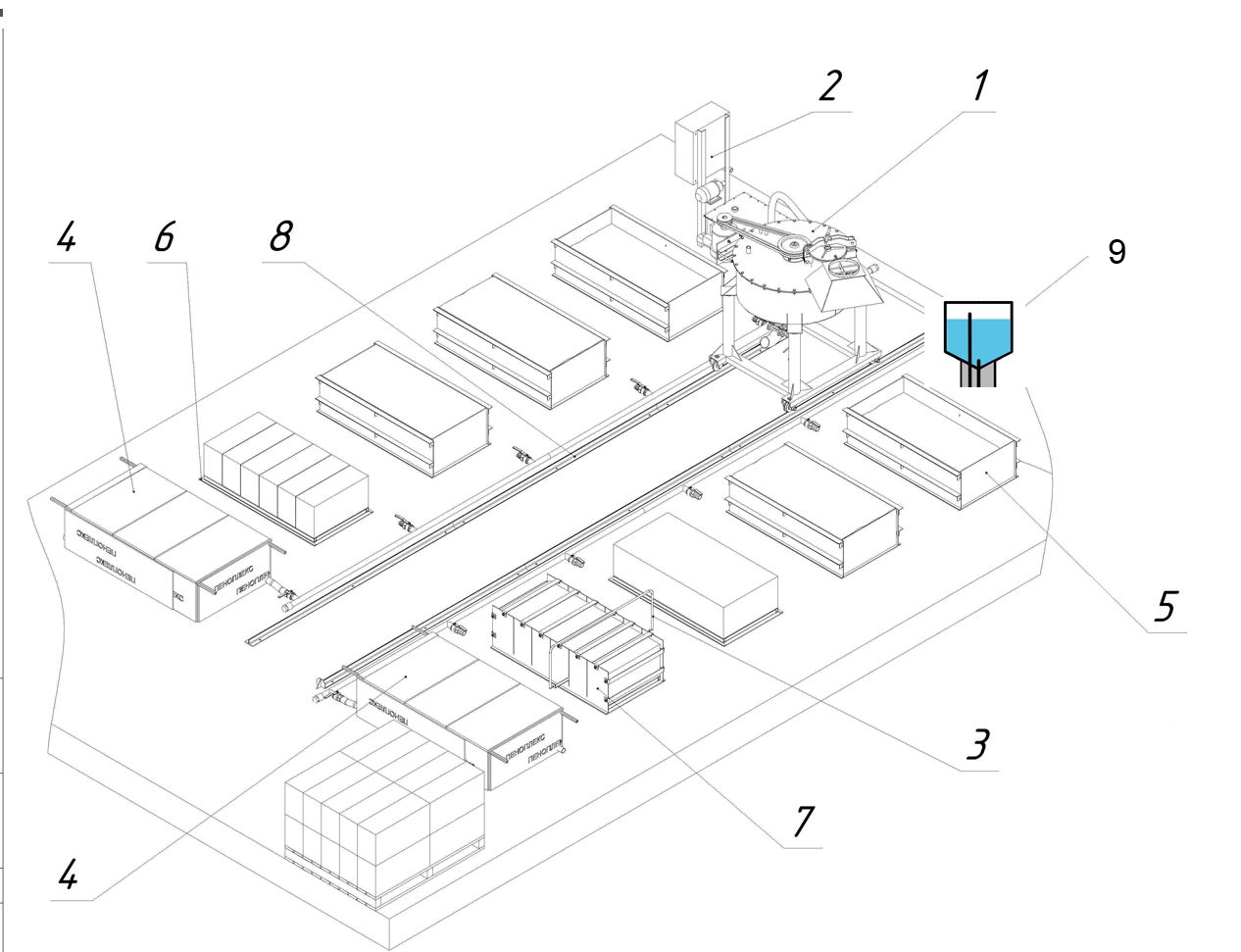
Рисунок 18–схема установки датчиков
№Поз |
Наименование |
Кол-во |
1 |
Датчик температуры |
1 |
2 |
Датчик температуры воздуха |
1 |
3 |
Датчик положения |
1 |
4 |
Датчик температуры камеры разогрева |
1 |
5 |
Датчик положения |
1 |
6 |
Датчик положения |
1 |
7 |
Датчик положения |
1 |
8 |
Датчик положения |
1 |
9 |
Датчик температуры воды |
1 |
Таблица 4–Пояснение к рисунку 18