

10.2. Шина расширения
Как уже отмечалось, ШР позволяет МП и ОП взаимодействовать с различными ПУ. За время, прошедшее после появления первых IBM PC, было разработано достаточно много вариантов ШР, поскольку появление новых быстродействующих поколений процессоров и ПУ (особенно видеосистем) требовало и более производительных ШР. Между тем одной из главных причин, сдерживающих интенсивное внедрение новых ШР, явилась их несовместимость со старыми стандартами, по которым множество фирм уже выпустили сотни тысяч единиц электронных компонентов PC и которые становились совершенно ненужными в случае использования новых ШР. В связи с этим эволюция ШР происходит достаточно медленно, без резких скачков. Ниже рассматриваются основные моменты в процессе эволюции архитектуры ШР IBM PC.
ЛОКАЛЬНЫЕ ШИНЫ РАСШИРЕНИЯ
Рассмотренные выше разновидности ШР (ISA, MCA, EISA) имеют общий недостаток – сравнительно низкое быстродействие. Быстродействие и разрядность процессоров и микросхем памяти (а следовательно, и локальной системной шины) возрастали, а характеристики ШР улучшались "экстенсивно", в основном за счет увеличения их разрядности. Для ряда ПУ, быстродействие которых определяется "человеческим фактором", например, клавиатуры, «мыши», высокого быстродействия ШР и не требуется. Однако при наличии таких ПУ, как жесткие диски, видеосистемы и т.д., низкое быстродействие ШР оказывает самое непосредственное влияние на производительность системы в целом. Проблема быстродействия ШР встала наиболее остро с появлением графических пользовательских интерфейсов, таких как Windows, при работе с которыми возникает потребность в передаче и обработке очень больших массивов данных.
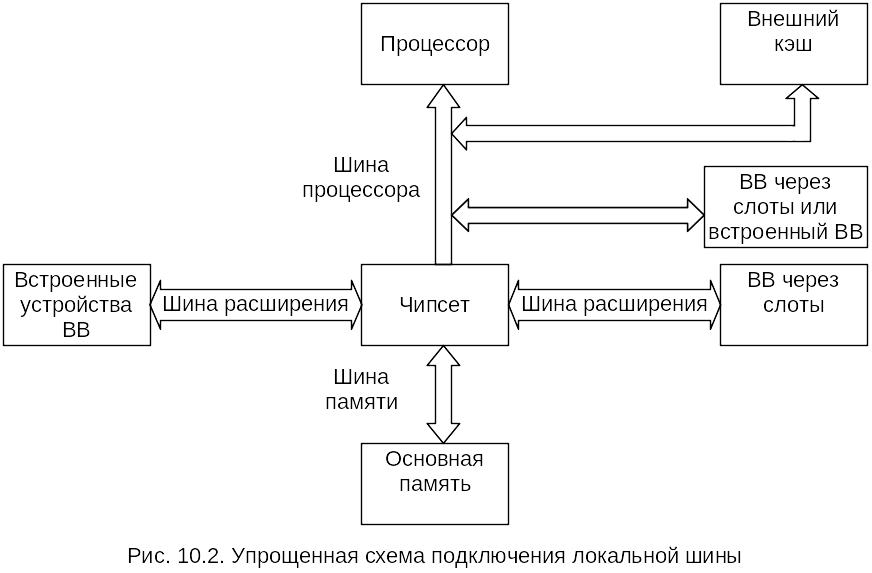
Достаточно очевидным решением этой проблемы является осуществление обмена между наиболее быстродействующими ПУ и ядром ЭВМ не через ШР, а через дополнительную быстродействующую магистраль, выходящую непосредственно на шину процессора. В этом случае ПУ получают доступ к самой быстродействующей шине компьютера наряду с внешним кэш. Такая конфигурация получила название локальной шины расширения или просто локальной шины (local bus). Подключение локальной шины такого типа иллюстрируется упрощенной схемой на рис. 10.2.
Первая локальная шина появилась в 1992 году в результате совместных усилий фирм Dell Computer и Intel. Хотя система оказалась поначалу весьма дорогостоящей, она продемонстрировала преимущества подключения видеосистемы к той точке, где можно было воспользоваться высоким быстродействием шины процессора. Этот первый вариант локальной шины был официально назван локальной шиной ввода/вывода I486 (I486 local bus I/O). К концу 1992 года стоимость компьютеров с локальной шиной стала снижаться, и многие фирмы начали производить аналогичные системы.
Для организации в компьютере локальной шины необязательно устанавливать слоты расширения: адаптер устройства, использующего локальную шину, можно смонтировать непосредственно на системной плате. В первых компьютерах с локальной шиной использовался именно такой вариант.
Локальная шина не заменяла собой прежние стандарты, а дополняла их. Основными шинами расширения в компьютере по-прежнему оставались ISA или EISA, но к ним добавлялся один или несколько слотов локальной шины. При этом сохранялась совместимость со старыми платами расширения, а быстродействующие адаптеры устанавливались в слоты локальной шины, реализуя при этом все свои возможности.
Компьютеры с локальной шиной стали особенно популярны среди пользователей Windows и OS/2, поскольку в слоты локальной шины можно было установить 32-разрядные платы так называемых видеоускорителей, которые значительно увеличивали быстродействие системы при работе с графическими изображениями. Производительность Windows и OS/2 существенно снижалась из-за ограничений, существующих даже в лучших платах VGA, подключаемых к шинам ISA или EISA. Обычные платы VGA могли выводить на экран до 600 000 точек в секунду, в то время как видеоадаптеры, соединенные с локальной шиной, по утверждениям изготовителей, за то же время выводили 50-60 млн. точек. В реальных условиях быстродействие, конечно, ниже, но разница все равно оказывалась существенной.
принципы организации систем прямого доступа к памяти
Материал, изложенный в предыдущих разделах, предполагал, что передача данных между ОП и ПУ, как правило, осуществляется с помощью процессора. Это так называемая программно-управляемая передача данных (программно-управляемый ввод/вывод), которая осуществляется при непосредственном участии и под управлением процессора. В англоязычной литературе – Programmed Input/Output (PIO). Процессор при этом выполняет соответствующую процедуру ввода/вывода (ВВ), являющуюся либо частью основной программы, либо оформленную как подпрограмма. Данные между ОП и ПУ пересылаются через процессор. Операции ВВ инициируются текущей командой программы или запросом прерывания от ПУ. Это соответствует принципам функционирования классической неймановской машины, описание которой приведено в гл.1. Более подробно процедура программно-управляемой передачи данных (программно-управляемого ВВ) рассмотрена в гл. 9.
Между тем такой вариант обмена между ОП и ПУ во многих случаях является далеко не самым оптимальным, а иногда вообще невозможным. Причин тому несколько. Рассмотрим очень коротко основные из них.
При программно-управляемом ВВ процессор "отвлекается" от выполнения основной программы решения задачи. Операции ВВ достаточно просты, чтобы эффективно загружать логически сложную быстродействующую аппаратуру процессора. В результате при использовании программно-управляемого ВВ снижается производительность ЭВМ в целом.
При пересылке любой единицы данных (байт, слово) процессор выполняет достаточно много команд, чтобы обеспечить буферизацию данных, преобразование форматов, подсчет количества переданных единиц данных, формирование адресов памяти и регистров ПУ. В результате скорость передачи данных при программно-управляемом ВВ (т.е. через процессор) может оказаться недостаточной для работы с высокоскоростными ПУ, например с накопителями на жестких дисках, видеосистемами, быстродействующими аналого-цифровыми и цифро-аналоговыми преобразователями различного назначения, и т.д.
Большинство современных сложных ПУ, таких как видеосистемы, сетевые карты, жесткие диски и т.д., осуществляют обмен с ОП целыми блоками информации. В этом случае перечисленные выше непроизводительные временные затраты процессора становятся особенно существенными.
Обмен в режиме прерывания, несмотря на все свои достоинства (см. гл. 6), требует еще помимо перечисленных выше непроизводительных временных затрат время на сохранение вектора состояния текущей программы в стеке и его последующего восстановления. Кроме того, прерывание в большинстве случаев возможно только после завершения текущей команды.
Несмотря на широкое использование программно-управляемого ВВ, для ускорения операций обмена данными между ОП и ПУ и разгрузки процессора от управления этими операциями в современных ЭВМ используется специальный режим обмена, получивший название режим прямого доступа к памяти или просто прямой доступ к памяти (ПДП). В англоязычной литературе – Direct Memory Access (DMA). Ниже, в зависимости от контекста излагаемого материала, будут употребляться обе аббревиатуры – ПДП и DMA.
Прямым доступом к памяти называется режим, при котором обмен данными между ОП и регистрами ПУ осуществляется без участия центрального процессора за счет специальных, внешних по отношению к нему, электронных схем. Простейший вариант такого обмена рассмотрен в гл. 9.
Введение режима ПДП (реализация каналов ПДП) всегда усложняет аппаратную часть ЭВМ, однако позволяет повысить скорость выполнения операций обмена ОП-ПУ, разгружает центральный процессор от обслуживания операций ВВ, повышает общую производительность ЭВМ. При наличии кэш-памяти достаточного объема режим ПДП в ряде случаев позволяет реализовать параллельное выполнение операций обмена и обработку команд текущей программы процессором, что также повышает общую производительность ЭВМ. Более того, наличие механизма прямого доступа к памяти позволяет поддерживать многопроцессорность вычислительной системы. На последнем моменте необходимо остановиться более подробно.
Дело в том, что термин ПДП (как и DMA), используемый при изложении материала настоящего раздела, в общем случае не совсем точно отражает суть процессов, происходящих в ЭВМ. Точнее, прямой доступ к памяти (к ОП) является только частным случаем организации процедур доступа к системной магистрали со стороны множества устройств, в том числе и процессоров. Под доступом к системной магистрали понимается возможность какого-либо устройства, имеющего соответствующее аппаратно-программное обеспечение (ведущее устройство, интеллектуальное устройство магистрали), занимать на какое-то время системную магистраль и полностью управлять ею, вырабатывая все необходимые управляющие сигналы. При этом могут осуществляться связи не только ОП-ПУ, но и ПУ-ПУ. Между тем смысл понятия "память" можно расширить и понимать под памятью не только ОП, но и адресуемые регистры ПУ. В этом случае использование термина ПДП (как и DMA) будет вполне корректно.
Следует иметь в виду, что термин "периферийное устройство (ПУ)" здесь используется достаточно условно. В англоязычной литературе ведущее устройство магистрали, инициирующее обмен, принято называть master. Устройство, к которому обращается master, является подчиненным, и его принято называть slave. Таким образом, более правильно говорить о реализации связей master-slave (M-S), а не ПУ-ПУ или ОП-ПУ. Мастером может быть только интеллектуальное устройство, имеющее средства управления магистралью (СУМ), которые, как минимум, должны "уметь" формировать и модифицировать адреса обращения, вести контроль за размером переданного блока информации и генерировать управляющие сигналы магистрали. Между тем в зависимости от текущего состояния вычислительного процесса одно и то же интеллектуальное устройство магистрали может выступать и как master, и как slave. Устройства магистрали, не имеющие СУМ, всегда являются подчиненными, т.е. slave.
Естественно, что предоставление магистрали в распоряжение того или иного устройства (захват магистрали) может происходить только на приоритетной основе. Эта процедура получила название арбитраж магистрали, а устройство, ее реализующее, – арбитр магистрали. В ряде случаев арбитр может строиться как отдельное устройство, размещенное на системной магистрали. В других случаях арбитраж магистрали выполняет сам процессор. Наличие процедуры арбитража позволяет размещать на системной магистрали несколько интеллектуальных устройств, в том числе и процессоров. В соответствии с принятой дисциплиной обслуживания (арбитража) каждое из них будет получать в свое распоряжение системную магистраль и устанавливать связи как с ОП, так и с регистрами других устройств магистрали. Следует отметить при этом, что в процедуре арбитража всегда предусматриваются средства, предотвращающие монопольный захват магистрали одним устройством. Часть этих средств может быть сосредоточена в арбитре, другая часть может быть распределена между устройствами магистрали, использующими режим ПДП.