

Волновые передачи
Передачи, в которых преобразование движения осуществляется за счет перемещения волны деформации гибкого звена, называются волновыми. Механические волновые передачи могут быть фрикционными, резьбовыми (винт—гайка) и зубчатыми.
Перемещение волны деформации гибкого колеса 1 (рис. 138) зубчатой волновой передачи (фрикционные и резьбовые волновые передачи еще не получили распространения и здесь не рассматриваются) вызывается подвижным механическим (или немеханическим, например электромагнитным) устройством 2, называемым генератором волн. Замыкает кинематическую цепь волновой передачи
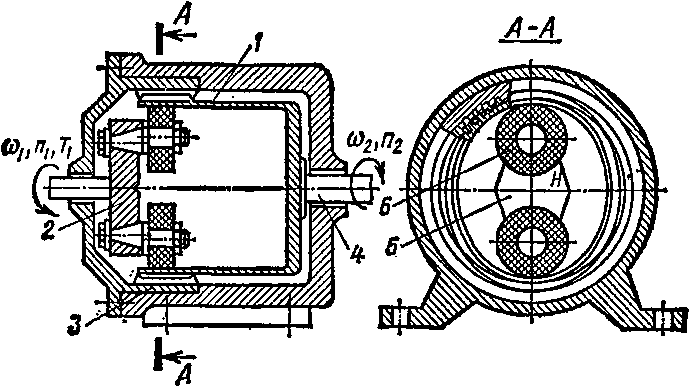
Рис. 133
(для краткости слово «зубчатой» опускаем) звено 3 —неподвижное жесткое зубчатое колесо с внутренними зубьями. Гибкое колесо / выполнено в виде упругого тонкостенного стакана с внешними зубьями z2, нарезанными на поверхности венца (утолщения) открытой части стакана; закрытый торец стакана жестко соединен с ведомым валом 4. Генератор волн 2 состоит из водила 5, жестко соединенного с ведущим валом (®i9 ях), и двух вращающихся роликов 6, закрепленных на эксцентриковых осях, позволяющих регулировать ролики в радиальном направлении.
Так как делительный диаметр гибкого колеса d2 меньше делительного диаметра жесткого колеса d3, то ролики генератора деформируют гибкое колесо, придавая ему форму эллипса (см. разрез Л —Л на рис. 138). При этом у концов большей (вертикальной) оси эллипса зубья колес находятся в полном зацеплении, а в направлении к концам меньшей (горизонтальной) оси эллипса радиальный зазор между зубьями колес увеличивается и в зонах, примыкающих к концам этой оси, зубья колес полностью выходят из зацепления.
При работе описанного генератора возникают две движущиеся волны (двухволновой генератор) гибкого колеса, вызывающие в нем радиальное и угловое перемещение; гибкое колесо обкатывается по неподвижному жесткому колесу в направлении, противоположном вращению вала генератора.
Из-за большой многопарности зацепления (например, в зацеплении пары колес двухволновой передачи одновременно находится 25... 30% зубьев гибкого колеса) волновая передача позволяет существенно повысить плавность зацепления, несущую способность и кинематическую точность.
На рис. 139 показан одноступенчатый волновой редуктор. Генератор волн 5 представляет собой жесткий кулачок, связанный с ведущим валом 1 упругой резиновой муфтой 14, предназначенной
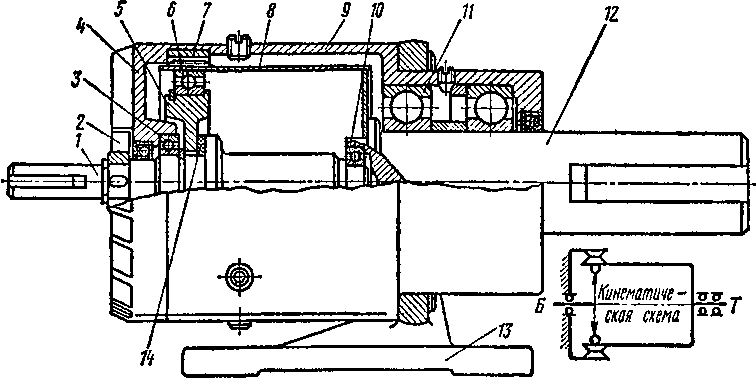
Рис. 139
для равномерного распределения нагрузки по двум зонам зацепления. Между кулачком и деформированным гибким звеном расположен шарикоподшипник 6 с гибкими деформируемыми обоймами. Гибкое колесо 8 выполнено в виде упругого тонкостенного стакана с приваренным дном, жестко связанным с ведомым валом 12. Жесткое колесо 7 с внутренними зубьями крепится к левой крышке 4% в которой расположена опора 3 ведущего вала 1\ вторая опора 10 расположена внутри ведомого вала 12. В правой части корпуса 9 расположены два подшипника 11 тихоходного вала. К корпусу прикреплен кронштейн 13 с лапами для крепления редуктора. Для увеличения теплоотдачи на быстроходный вал надета крыльчатка 2, а на крышке корпуса (со стороны генератора волн) имеются радиальные ребра.
Техническая характеристика редукторов, выпускаемых по конструктивной схеме рис. 139: и « 80 ... 300, Р « 0, 05 ... 3 кВт, г\« «0,75 ... 0,90.
Волновые передачи могут быть использованы для передачи вращения в герметизированное пространство через непроницаемую стенку, без применения уплотнений или специальных диафрагм. На рис. 140 показана конструкция такой передачи. На валу электродвигателя 1 закреплен двухволновой генератор 2 о промежуточными телами качения (шариками). Для уменьшения напряжений в зоне наибольшей деформации гибкое колесо 3 изготовлено сложной формы с жестко закрепленными торцами. В средней части гибкое колесо имеет наружные зубья, находящиеся в зацеплении с зубьями жесткого колеса 4, выполненного в виде свинчиваемых полуколец. Область внутри гибкого звена герметична и изолирована от окружающего пространства. Это и позволяет использовать передачу в приводах космических кораблей и изолированных химически агрессивных сред.
Достоинства. 1. Большая несущая способность на единицу массы передачи (в 3... 4 раза выше зубчатых передач). 2. Возможность получения больших передаточных отношений до 1000 в одной ступени передачи. 3. Плавность и бесшумность работы передачи. 4. Высокая кинематическая точность передачи. 5. Надежность зацепления (при многопарном зацеплении поломка зуба не
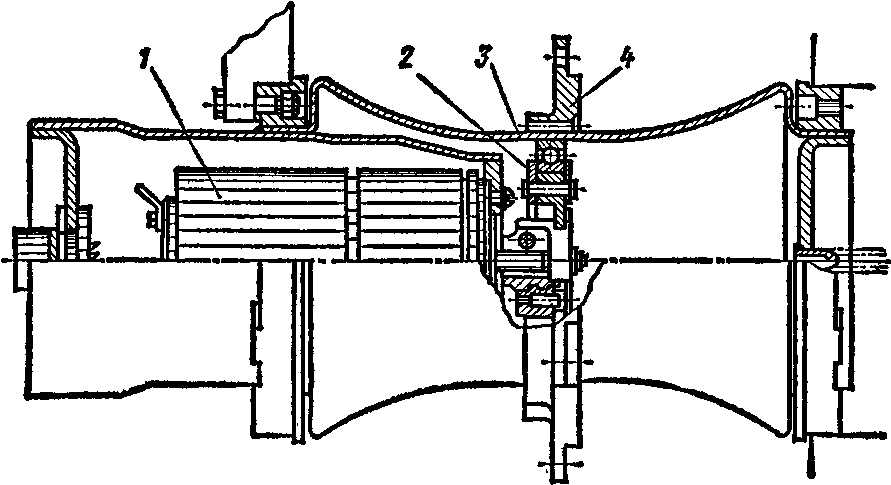
Рис. 140
нарушит работоспособности и точности передачи). 6. Возможность передачи движения в герметизированное пространство. 7. Малогаба-ритность и возможность рационального использования объема передачи при ее компоновке.
Недостатки. 1. Сложность конструкции генератора волн. 2. Необходимость выбора оптимальной геометрии зубьев колес. 3. Из-за непрерывного значительного деформирования гибкого колеса представляют повышенные требования к выбору его материала (сталь, пластмасса) и технологии изготовления. 4. Маломощность передачи (до 3.. .5 кВт). 5. Невысокий КПД (в силовых передачах г] = 0,75... ...0,90).
Несмотря на указанные недостатки, область применения передач расширяется. Одноступенчатые и многоступенчатые волновые передачи применяют в силовых и кинематических автономных или встроенных редукторах и мультипликаторах при /л,6=50... 105; в башенных строительных кранах; в приводах космических аппаратов; в уникальных механизмах различного типа летательных аппаратов, луноходах, атомных реакторах, приводах прецизионных приборов и др.
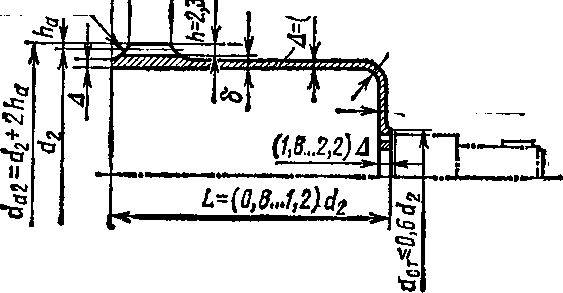
Так как волновые передачи изобретены недавно (В. Мессером в 1959 г.), то установившейся геометрии и методики их расчета пока не существует. При расчете обычно используют следующие формулы (рис. 141).
Делительные диаметры гибкого d2 и жесткого du колес определяют, как и в зубчатых передачах:
d2 = mz* или do = mz«.
(178)
Разность делительных диаметров жесткого и гибкого колес
da — d2 = miT = A3t2, (179)
где *г — число волн генератора (обычно *'г = 2); Д3в 2—- приращение делительных диаметров жесткого и гибкого колес.
Д иаметры
вершин зубьев:
иаметры
вершин зубьев:
гибкого колеса
da2 = d2 + 2x2m; (180) жесткого колеса da3 = d3—2(fQ — х3)т, (181)
где /0—коэффициент высоты головки зуба, х— коэффициент смещения исходного контура при нарезании зубьев гибкого х2 и жесткого хв колес. Значения указанных величин зависят от
многих факторов (а, z, т и др.) и принимаются по специальным рекомендациям (см.* например, [2]). Передаточное отношение
j (£l tti _j
— щ — л2 ^3 "
Окружная скорость
*3 ,2
#3 — #2 /r
(182)
0=(o2d2/2 = nd2n2/60.
Момент на валу генератора Т± вычисляют по известной формуле (17), где Т2 — момент на ведомом валу (гибком колесе). При установившемся равномерном вращении валов передачи
7\ + Г2 + Г3 = 0, где Та —-момент, приложенный к жесткому колесу.
Расчет планетарной и волновой передач
Последовательность силового и геометрического расчета плане-тарной передачи зависит от условий ее эксплуатации. При отсутствии ограничения габаритных размеров передачи ее силовой и геометрический расчет выполняют аналогично расчету обыкновенных зубчатых передач с учетом геометрии внутреннего зацепления.
Передаточные отношения зависят от схемы передачи.
Если передачу необходимо вписать в заданные габариты, например в корпус станка или двигателя, то диаметр центрального колеса (колеса k с внутренними зубьями, см. рис. 135) принимают в соответствии с допускаемыми размерами, т. е., выбрав числа зубьев колес (см., например, с. 101 [2]) и вычислив передаточное отношение, по формуле (83) определяют модуль зацепления, а по формуле (87) —межосевое расстояние, которое для колес внутреннего зацепления
о*=* (d,-di)/2- (т/2) (г^г^ (тг£/2) (I-1). (183)
Диаметр вершин зубьев колеса
dtf2 = d2—2m+15,2 т[гй. (184)
Диаметр впадин зубчатого колеса k
d/a = d2 + 2,5 m. (185)
Ширина венца Ь зубчатого колеса может быть найдена по формуле (90) при 1—1 для внутреннего зацепления.
Окружная сила в планетарной передаче (см. рис. 135)
Ftt = Fn = 2KnTi/(tA)> (186)
где Кн — 1,1.. .2 —коэффициент, учитывающий неравномерность распределения нагрузки между сателлитами; ic — число сателлитов; Т±— момент, передаваемый шестерней b (см. рис. 135); ^—делительный диаметр шестерни Ь.
Для зубчатых колес внутреннего зацепления коэффициент формы зуба можно вычислить по приближенной формуле
YFH&2z/(z + 20). (186а)
Кинематический расчет любой планетарной передачи рекомендуется выполнять в такой последовательности:
Мысленно закрепляем все колеса на водиле Н и получаем одинаковую угловую скорость колес и водила—оя.
Мысленно закрепляем водило (т. е. планетарную передачу превращаем в зубчатую) и поворачиваем центральное колесо с угловой скоростью со, равной разности абсолютных скоростей водила и центрального колеса, но в обратную сторону вращения водила:
0)=^ — —©ц).
3. Последовательно складывая угловые скорости, полученные в первом и втором движениях звеньев передачи, находим угловую скорость каждого звена (колеса, водила).
Последовательность расчета волновой передачи.
1. По наиболее нагруженному зубу определяют модуль
т>//СГЖ'Ч> [*«.]). (187)
где К —коэффициент, зависящий от типа генератора. Например, при двухволновой передаче (*г = 2)/(= 11,6 для кулачкового (при а = 20°), К =18,5 для дискового, /( = 36,2 для роликового генератора; t|>==&/d2 = 0,07.. .0,12 —коэффициент длины зуба; [асм]= = 350.. .500 МПа—допускаемое напряжение смятия для сталей 40Х, ШХ15, 35ХГСА, 38ХМОА и др., применяемых для изготовления гибкого крлеса твердостью НВ250...350.
По формуле (182) вычисляют передаточное отношение и, предварительно задавшись числом волн ir (обычно £г = 2), определяют *2 = пг.
Используя формулы (178), (179), находят число зубьев жесткого колеса г3 = г2-Ыг.
С помощью формул (178) определяют d2 и d9.
Вычисляют длину зуба:
6 = t|)da. (188)
6; Проверочный расчет выполняют из условия прочности зубьев на смятие
Ос* = КТ№Ыт*)^[осы] (189)
и из условия прочности гибкого колеса на кручение
тк = 2^tT2/(nXdl) < [тк], (190)
где i|)f = d/A = 80... 100 — отношение диаметра трубы d к толщине ее стенок А (см. рис. 141); X = 1/6— коэффициент неравномерного распределения касательных напряжений по периметру гибкого колеса; [тк]« 50...80 МПа.
По формулам (180), (181) определяют диаметры вершин зубьев.
Толщину обода под зубчатым венцом вычисляют по формуле
6 = (22.. .29) 10-3K77V6. (191)
Остальные конструктивные размеры гибкого колеса приведены на рис. 141.
Задача 36. Найти частоту вращения водила Н и колеса с дифференциала (см. рис. 135), если: а) г& = 20, г/г = 54, гс — гв, /г& = 150 мин-*, nk = 50 мин*-*; б) г& = 23, Zft = 73, zc=zzet «6 = 280 мин-*, дг^ =75 мин~*.
Модули зубчатых колес дифференциала одинаковы.
Решение, а) Используя рис. 135 и данные условия задачи, найдем число зубьев сателлитов zc {zc — ze или dc — de)% dk = 2dc+db (см. рис. 135) или mzb — 2mzc4-mzh и
= *б)/2 = (54 - 20)/2 = 17.
1. Мысленно закрепив все колеса дифференциала на водиле, получаем
пь = пн, пс — пе = пх> Пк = ПМ.
2. Мысленно закрепляем водило и поворачиваем центральное колесо Ь с час- тотой вращения я = —- (пн—пь). Тогда частота вращения сателлитов ewe
— {пн—пъ) ibt с = — (пИ—пь) (— zb/zc) = (nH—nb) (zb/zc);
колеса k
— ("я— "ь) h. k = — («я—nb) (— (+**/**) = (nH—nb) 2b/Zk.
3. Последовательно складывая частоты вращения, полученные в первом и втором движениях звеньев дифференциала, определяем: а) частоту вращения водила Н:
я* = («я— Ч) Ч1Ч — "я+ «я ~—пъгь1гк,
"я~ \ + гь/гк ~ 1 + 20/54 -4'[так как колеса k и Ь вращаются в противоположные стороны (см. рис, 135), то при пь> 0 щ отрицательна];
б) частоту вращения сателлитов сие:
"с= "н+ (08мин
пн—пь) гь/гс = 4,08+ (4,08—150) 20/17 «—168 мин-».
Отрицательное значение пс подчеркивает противоположные направления вращения колес b и с (зубчатые колеса внешнего зацепления всегда вращаются в противоположные стороны).
Задача 37. Рассчитать двухволновую передачу, если Пх = 970 мин**1, я2=10 мин-"*, Р2 = 1,15 кВт. (См. последовательность расчета волновых передач.)
Литература: [2, 9, 10]; задача 9.18 [12].
Вопросы для самопроверки. 1. Какая передача называется планетарной? Ее преимущества, недостатки и область применения. 2. В каком случае планетарную передачу называют дифференциалом? Укажите область применения дифференциальных механизмов. 3. Как можно вычислить передаточное отношение планетарной передачи? 4. Какая передача называется волновой? 5. Перечислите достоинства, недостатки и области применения волновой передачи.