

5.2.3. Схемы соединения и способы коммутации секций вд
Как было показано при рассмотрении принципа действия ВД, в процессе вращения ротора происходит периодическое переключение секций обмотки так, чтобы осуществлялось дискретное вращение вектора н.с. якоря.
В общем случае, ЭМП может иметь какое угодно число секций – n от единицы до бесконечности. Хотя чаще всего используются двигатели с небольшим числом секций n=[1,4]. Это объясняется тем, что увеличение их числа ведет к усложнению и удорожанию ПК. Секции распределены равномерно по окружности ЭМП. Угловые рассогласования между их магнитными осями для нечетных n определяются выражением:
(5.4 а)
δ=2π/n.
Для четных n возможны два варианта выполнения обмотки: симметричная звезда (рис. 5.11.а), когда угол между магнитными осями секций определяется тем же уравнением; несимметричная звезда (рис. 5.11.б), когда
(5.4 б)
δ=π/n.
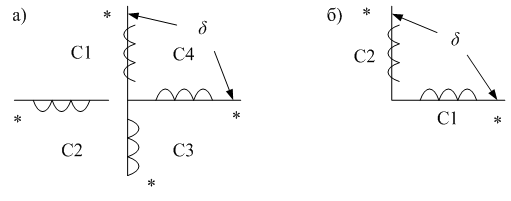
Рис. 5.11. Возможные варианты расположения секций по расточке статора ЭМП
Схемы соединения секций можно разделить на три группы: гальванически развязанные секции (рис. 5.11); разомкнутая обмотка, соединенная в звезду (рис. 5.12.а); замкнутая обмотка (рис. 5.12.б).
Подключение секций к источнику постоянного тока может быть осуществлено по двух- и трехпроходной схемам. В первом случае для гальванически развязанных секций используется n однофазных мостовых инверторов напряжения, а для замкнутой и разомкнутой обмоток при реверсивном питании секций n-фазный мостовой инвертор, к выходам которого подключаются входные концы разомкнутой или общие точки замкнутой обмоток (рис. 5.12.а). Гальванически развязанные секции и замкнутая обмотка могут подключаться к источнику питания только таким способом. При нереверсивном питании секций по двухпроводной схеме одна шина источника подключается к общей точке разомкнутой обмотки, а ко второй шине через ключи подключаются входные концы секций. Трехпроводная схема может быть использована только при разомкнутой обмотке и предполагает наличие двух одинаковых источников питания, две разноименные шины которых объединены в общую точку, последняя соединяется с общей точкой обмотки, а оставшиеся шины подключаются к соответствующим шинам n-фазного инвертора, как это показано на рис. 5.12.б, где ключи инвертора не показаны.
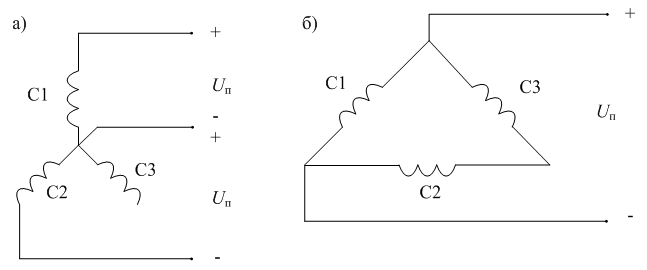
Рис. 5.12. Схемы соединения и способы подключения секций к источнику питания
Каждая из подключенных к источнику питания секций создает свою намагничивающую силу, вектор которой при положительном токе совпадает по направлению с магнитной осью секции, а ее модуль в установившемся режиме (Fс) определяется схемой подключения. Модуль и направление вектора намагничивающей силы обмотки (F) определяются комбинацией и количеством одновременно включенных секций. В совокупности эти факторы образуют способы коммутации секций. Заданный способ коммутации обмотки ЭМП формируется n-мерным вектором напряжения U, который определяет напряжение на входе каждой секции путем подключения ее к соответствующей шине источника питания и на каждом такте коммутации имеет свое значение, в соответствии с которым меняется его направление на комплексной плоскости при неизменном модуле. Например, при нереверсивном питании секций (n=3,4) алгоритмы коммутации получат вид
(5.5)
| 1| 1 0 0 |A | = 0 1 0 | 3 | 0 0 1
| 1| 1 0 0 0 | 2| 1 1 0 0 |A | = 0 1 0 0 |A | = 0 1 1 0 | 4 | 0 0 1 0 | 4 | 0 0 1 1 0 0 0 1 1 0 0 1 |
В матрицах (5.5) нижний индекс означает общее число секций ЭМП (n), верхний индекс означает число секций, подключенных к источнику питания на МКИ (m). По горизонтали матрицы откладываются номера МКИ (1,…,Nк), по вертикали – номера секций (1,…,n). Значение координаты напряжения секции «1» означает подключение ее к шине питания, «0» означает, что секция от источника отключена.
При реверсивном питании секций для n=1,2,3 имеем
(5.6)
| 1| |A | = 1 -1 | 1 |
| 1| |A | = 1 0 -1 0 | 2 | 0 1 0 -1
| 2| |A | = 1 1 -1 -1 | 2 | 1 -1 -1 1
| 2| 1 0 -1 -1 0 1 |A | = 0 1 1 0 -1 -1 | 3 | -1 -1 0 1 1 0
| 3| 1 1 -1 -1 -1 1 |A | = -1 1 1 1 -1 -1 | 3 | -1 -1 -1 1 1 1 |
Здесь значение координаты напряжения на секции «1» означает подключение ее к положительной шине источника питания, а «–1» к отрицательной шине.
По выражениям матриц алгоритмов коммутации несложно построить векторную диаграмму н.с. якоря, для каждого МКИ. Например, считая, что вектор н.с. секции направлен к концу секции, подключенному к положительной шине источника питания, при нереверсивном питании четырехсекционного и реверсивном питании двухсекционного двигателей для m=1 имеем векторную диаграмму н.с. (рис. 5.13).