

Воронин Сергей Григорьевич
Глава 5. Система управляемый преобразователь – двигатель переменного тока. Электроприводы с вентильными двигателями
В гл. 3 мы показали, что для двигателей переменного тока наиболее эффективным оказывается частотное управление. Однако при этом одновременно с частотой должно меняться и напряжение питания двигателя, поэтому, строго говоря, системы с двигателями переменного тока должны содержать два преобразователя: один для регулирования частоты, а другой для регулирования напряжения. В качестве преобразователя частоты обычно используют инвертор напряжения или тока, а в качестве преобразователя напряжения управляемый выпрямитель, если первичным источником питания привода является сеть переменного тока, или импульсный преобразователь постоянного напряжения, если имеем первичный источник постоянного тока. Рассмотрим отдельно системы привода с асинхронными и синхронными двигателями.
5.1. Система управляемый преобразователь – асинхронный двигатель
Такие системы находят применение в летательных аппаратах, например, при создании систем электропривода управляющих маховиков, в гиродинах, стабилизирующих гироскопах и др. Для реализации частотного управления асинхронными двигателями разработано большое количество вариантов схем, отличающихся особенностями формирования момента, принципами построения преобразователей частоты, возможными режимами работы и т.д. Рассмотрим наиболее распространенные из них.
5.1.1. Разомкнутый частотно-регулируемый привод
Обобщенная функциональная схема привода представлена на рис. 5.1, где обозначено: РЧ – регулятор частоты; РН – регулятор напряжения; БП – блок преобразователей частоты и напряжения; ДН – датчик напряжения; ФП – функциональный преобразователь; U0 – напряжение задания скорости; Uс – напряжение первичного источника.
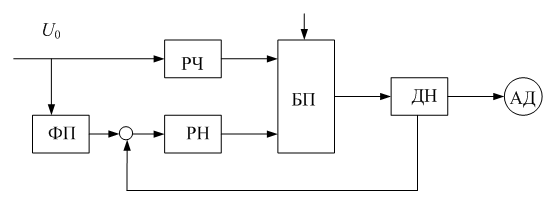
Рис. 5.1. Функциональная схема разомкнутого частотно-регулируемого привода
Указанная схема реализует алгоритм частотного управления приводом, описанный в п. 3.1.5, в соответствии с которым одновременно с частотой меняется напряжение, например, по уравнению (3.25). Требуемый закон изменения напряжения в зависимости от частоты реализуется функциональным преобразователем. С помощью такой схемы можно реализовать электропривод с семейством параллельных механических характеристик так же, как в электроприводе постоянного тока при якорном управлении. Однако при низких частотах вращения трудно обеспечить параллельность характеристик из-за влияния активного сопротивления обмотки статора.
Имеются различные модификации описанной схемы. В частности, нашла применение схема с токовым управлением, функциональная схема которой представлена на рис. 5.2, где обозначено: ДТ – датчик тока; РТ – регулятор тока; Uзт – напряжение задания тока; Uзч – напряжение задания частоты.
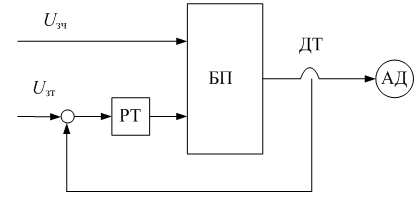
Рис. 5.2. Функциональная схема привода с токовым управлением
Из теории электрических машин известно, что при стабилизированном токе критический момент двигателя (Mki) и критическое скольжение (Ski) не зависят от частоты. При этом Mki больше, чем критический момент двигателя, работающего на естественной характеристике от источника напряжения. Характеристики привода, построенного по такой схеме, аналогичны характеристикам привода постоянного тока с отрицательной обратной связью по току, т.е. значительно мягче естественных, поэтому рассмотренная схема может быть рекомендована в системах регулирования момента. Практическая реализация такой схемы возможна только при строгом задании критического скольжения, что возможно в системах с обратной связью по скорости.
В основе построения таких систем лежит принудительное формирование скольжения асинхронного двигателя по сигналам датчиков частоты вращения. При этом используется тот же датчик, который устанавливается в канале главной обратной связи привода. Функциональная схема привода представлена на рис. 5.1, где знаком «+» обозначено устройство суммирования частоты обратной связи, т.е. частоты вращения f=ωp/(2π) и частоты задания скольжения f2=Sfн. С помощью этого устройства формируется заданное скольжение. Так как по мере роста скорости растет и частота так, что скольжение остается постоянным.
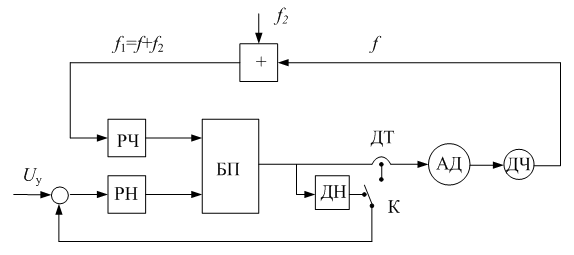
Рис. 5.3. Функциональная схема частотно-управляемого привода с обратной связью
В зависимости от положения переключателя К будут меняться и характеристики привода. При введении обратной связи по напряжению характеристики становятся более жесткими, а при введении обратной связи по току они становятся более мягкими.