

31.Кинематика поворота с учетом увода автомобильных колес
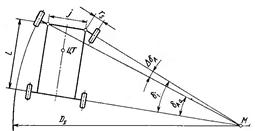
Возникающие при повороте автомобиля боковые силы вызывают увод колес, что приводит к отклонению направлений скоростей Vα и Vβ. Углыδ1 и δ2 , на которые отклоняются направления скоростей Vα и Vβ за счет увода или бокового скольжения, развала и кинематики подвески называют углами увода соответственно передней и задней осей. Отношение боковой силы, действующей на ось, к углу её увода называют к-том сопротивления уводу данной оси.
Мгновенным центром поворота автомобиля является точка О пересечения перпендикуляров к направлениям скоростей Vα и Vβ. Найдем расстояния R и C от точки О до продольной оси АБ и задней оси автомобиля. Для этого опустим перпендикуляр ОВ на продольную ось. Угол АОВ =δ2 , а угол ВОБ =θδ1 - как углы с перпендикулярными сторонами. Из треугольников АОВ и ВОБ имеем:
АВ = С = Rtgδ2 и ВБ = Rtg(θ – δ1).
Складывая эти два выражения получим:
R
= =
= ,
(7.4)
,
(7.4)
Отсюда:
С =
32.Занос автомобиля при повороте на горизонтальной дороге.Условия наступления заноса.
Занос — нарушение движения автомобиля вдоль продольной плоскости колёс. Вызывается умышленно водителем, либо неумышленно.
Причины неумышленного заноса:
плохое сцепление колес с дорогой (в том числе чрезмерный износ покрышек и аквапланирование).
неправильная работа со сцеплением
резкий сброс газа на ходу
резкий манёвр рулем
низкое давление в шинах
Рис.в вопр.33.
Условие наступления заноса:
FY =R zн *ϕ′ + Rzв * ϕ′
MV2/R = ϕ′*( R zн+ Rzв)
(R zн+ Rzв)=Ga
Ga=Mg
MV2/R= ϕ′* Mg
V= корень(ϕ′*R*g) – cкорость начала заноса на плосой дороге.
FY – центробежная боковая сила
ϕ′ - коэф. сцепления в поперечном направлении
R zн, Rzв – реакция дороги
33. Опрокидывание автомобиля при повороте на горизонтальной дороге.Условия наступления опрокидываня.
В/2hg=tgβ=Kпр - коэф-нт поперечной устойчивости автомобиля, хар-ет способность авт. двигаться по косогору и быстро проходить повороты малого размера.
Общетранспортные автомобили проектируются таким образом, что при стандартномнагружени занос всегда наступает раньше опрокидывания.
Rzвн=0
Fy*hg+(Ga*B/2) –Rzн*B=0
Rzн=Ga
Fy*hg–(B/2) * Ga=0
(M*V2/R)
*hg
-MB/2=0
V2/R*hg=g*B/2
V2=B*g*R/2hg
V = ( корень)B*g*R/2hg-скорость начала опрокидываня, з-т от колеи автомобиля, от высоты центра тяжести,от радиуса поворота.
 Силы
действующие на авт. при повороте на
горизонтальной дороге.
Силы
действующие на авт. при повороте на
горизонтальной дороге.

F

 ytg
B
ytg
B
 hg
hg
R yн Ga Ryвн
RzнRzвн
B
34.Понятие о стабилизации управляемых колес автомобиля.
Стабилизацией управляемых колес автомобиля называется их способность сохранять положение, соответствующее прямолинейному движению, и возвращаться к нему после отклонения, вызванного поворотом руля или действием других сил.
Стабилизация управляемых колес происходит под действием моментов танценциальных X, боковых Y и вертикальных Z реакций на колесах относительно шкворней поворотных цапф.
Стабилизация управляемых колес улучшается при наличии продольного наклона шкворней (угол γ), бокового наклона шкворней (угол β) и боковой эластичности шин.
Параметрами, характеризующими стабилизацию управляемых колес, являются:
а) стабилизирующий момент Мс, стремящийся возвратить колеса в первоначальное положение;
б) угловая скорость ω самовозврата колес в нейтральное положение;
в) фактор стабилизации Фс — обратная величина минимально возможного угла поворота колес от нейтрального положения при их самовозврате.
Стабилизирующий момент при отклонении управляемых колес от нейтрального положения определяется по уравнению
![]() (37.4)
(37.4)
где Мzβ — момент от вертикальных реакций, вызванных боковым наклоном шкворней;
MYγ —момент от боковой реакции, вызванной продольным наклоном шкворней;
MYэ—момент от боковых реакций, вызванных боковой эластичностью шин;
Мхэ— момент от тангенциальной реакции, вызванной боковой эластичностью шин;
Mтр — момент трения в механизмах рулевого управления.