

Полное статическое уравновешивание кривошипно-ползунного механизма
Рис. 10. 10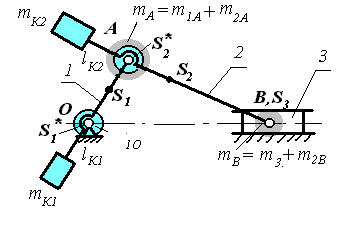
Дано: l1, l2, lOS1, lAS2;
m1, m2, m3;
S3 совпадает с т. В.
Определить:
mК1, mК2
lК1, lК2
Заменим каждое звено двумя сосредоточенными массами, используя систему уравнений перехода:
Звено 1: ![]() ;
;
![]() ;
;
Звено 2: ![]() ;
;
![]() ;
;
Объединим массы, размещенные в точках А и В:
mА = m1А + m2А, mВ = m2В + m3.
Массу mВ уравновешивают противовесом массой mК2 , определяемой из соотношения: mK2 lK2 = mB l2, (длиной lK2 задаются)
![]()
Точка А становиться центром масс уравновешенного звена 2 с массой
m*А = mА + mВ+ mК2 .
Ее уравновешивают корректирующей массой mК1.
![]() .
.
После установки двух корректирующих масс общий центр масс становиться неподвижным и будет находиться на оси вращения кривошипа вала (в точке О). Точка О в этом случае является центром масс всего механизма, т.е. rSM = 0 и mM = m1 + m2 + m3 + mK1 + mK2.
При полном статическом уравновешивании один из противовесов устанавливается на шатуне (звено 2), что резко увеличивает габариты и массу механизма, поэтому применяют частичное (неполное) уравновешивание, добиваясь движения центра масс по специальной (расчетной) траектории.
Частичное статическое уравновешивание, при котором допускается движение центра масс вдоль направляющих ползуна (уравновешивание вертикальной составляющей сил инерции)
Каждое из звеньев заменяется двумя сосредоточенными массами, с использованием систему уравнений (10.4) и (10.5):
Массы, размещенные в шарнирах А и В, объединяются:
Рис. 10. 11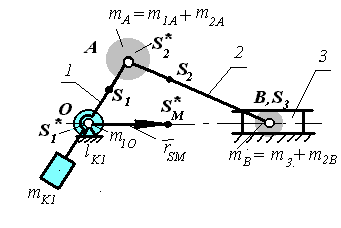
Массу mА уравновешивают противовесом массой mК1
![]()
В этом случае уравновешивается только вращающаяся часть замещающих масс.
Для нахождения траектории движения центра масс частично уравновешенного механизма определим параметры радиус-вектора центра масс (rSmin и rS):
Рис. 10. 12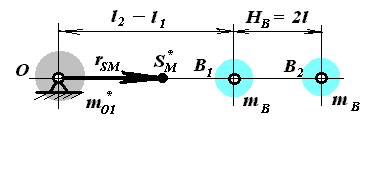
![]() = mК1 +
m1О+ m2А
+ m1А ;
= mК1 +
m1О+ m2А
+ m1А ;
m = + mВ;
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
Такое уравновешивание применяют для кривошипно-ползунных механизмов с вертикальным расположением ползуна, или с горизонтальным расположением ползуна при низком фундаменте.
Частичное уравновешивание для случая, когда центр масс движется по дуге, хорда которой перпендикулярна оси направляющей ползуна
Каждое звено заменяется двумя сосредоточенными массами, с использованием систему уравнений (10.4) и (10.5):
Массы, размещенные в точках А и В, объединяются:
mА = m1А + m2А, mВ = m2В + m3.
Данный механизм уравновешивается корректирующей массой mК1:
mК1
=
![]() +
+

Рис. 10. 13
Корректирующая масса
![]() уравновешивает массу mА:
уравновешивает массу mА:
![]() .
.
Корректирующая масса
![]() уравновешивает массу mВ.
Ее величина находится из условия, что
центр масс
и mА расположен
в т.О. Центр масс
и mВ лежит на прямой BD
и делит ее в отношении x/y
, т.е
x
= mВy
. Через отрезок OS** проведем
прямую параллельную АВ и тогда из подобия
треугольников найдем:
уравновешивает массу mВ.
Ее величина находится из условия, что
центр масс
и mА расположен
в т.О. Центр масс
и mВ лежит на прямой BD
и делит ее в отношении x/y
, т.е
x
= mВy
. Через отрезок OS** проведем
прямую параллельную АВ и тогда из подобия
треугольников найдем:
![]() ;
;
![]() .
.
Суммарная корректирующая масса  .
.
Радиус-вектор центра масс находится из соотношений:
![]() ;
; ![]() ;
;
 .
.