

Завдання 4-2
Виконати розрахунок перехідного процесу в лінійному електричному колі способом побудови графічної моделі розрахункової схеми в системі Simulink.
Найбільш простим методом розрахунку і моделювання перехідних процесів у лінійних електричних ланцюгах є спосіб створення графічної моделі розрахункової схеми в системі Simulink з використанням бібліотек елементів PowerSystemBlocked.
Основою даного методу є створення графічної моделі розрахункової схеми з подальшим встановленням в місці комутації керованого ключа, що дозволяє моделювати перехідний процес.
Усі розрахунки перехідного процесу відбуваються в автоматичному режимі на основі завдання параметрів елементів лінійного електричного кола.
Методика використання данного методу розрахунку і моделювання перехідних процесів у лінійних електричних мережах розглянута в прикладі №1.
Наступний метод, з розрахунку і моделюванню перехідних процесів у лінійних електричних мережах, ґрунтується на використанні редактора диференціальних рівнянь DEE (DifferentialEquationEditor).
Основа даного методу складається в програмуванні блоку DEE системою диференціальних рівнянь у явній формі Коші з урахуванням початкових умов і параметрів вектора вхідного впливу. Даний блок після проведених обчислень дозволяє одержати шукані величини.
Методика використання даного методу розрахунку і моделювання перехідних процесів у лінійних електричних мережах розглянута в прикладі №2
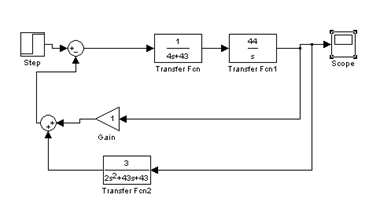
Моделювання і розрахунок перехідних процесів у лінійному електричному колі способом побудови графічної моделі розрахункової схеми в системі Simulink виконується з використанням бібліотек PowerSystemBlocked на основі розрахункової схеми приведеної на рис. 1.
Графічна модель лінійного електричного кола, побудована з використанням бібліотек PowerSystemBlocked, зображена на рисунку :

Моделювання перехідного процесу відбувається шляхом подання ступінчастого імпульсу (блок Step) на кероване джерело напруги (блок ControlledVoltageSource).
У момент запуску схеми відбувається автоматичний розрахунок перехідних процесів з урахуванням параметрів елементів лінійного електричного кола. Результати розрахунку показуються на графіках залежності шуканих величин як функції від часу, що приводяться на осцилографі
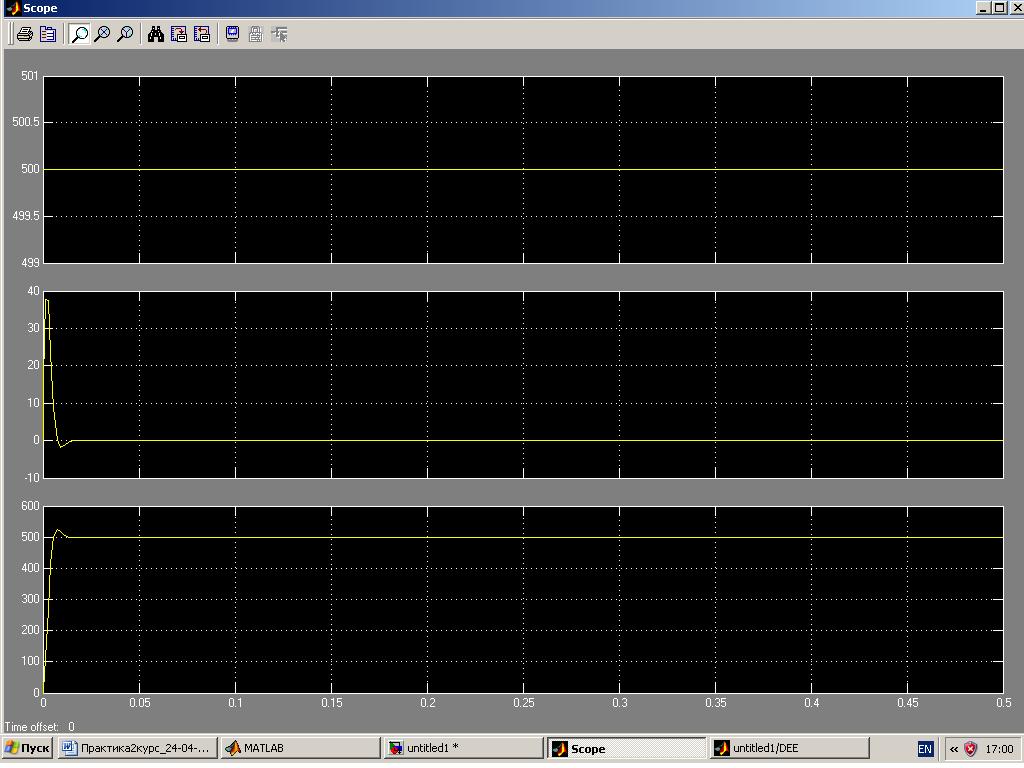
Висновок: Провівши моделювання перехідних процесів, було виконано розрахунок перехідного процесу в лінійному електричному колі способом побудови графічної моделі розрахункової схеми в системі Simulink, а також побудували графіки функцій UL = UL(t), UC=UC(t), UR= UR(t) і І=І(t).
Завдання 5 Моделювання лінійних систем
Побудувати tf
, zpkта ssмоделі
для системи, передаточні функції двох
ланок якої задані відповідно у вигляді:
![]() та
та
![]() (N-
остання цифра залікової книжки). Ланка
управління даної системи складається
із двох паралельно з'єднаних частин.
Перша частина представляє
собою звичайну підсилювальну ділянку,
передаточна функція якої рівна N.
Передаточна функція другої
частини:
(N-
остання цифра залікової книжки). Ланка
управління даної системи складається
із двох паралельно з'єднаних частин.
Перша частина представляє
собою звичайну підсилювальну ділянку,
передаточна функція якої рівна N.
Передаточна функція другої
частини:
![]()
Побудову здійснити згідно вимог:
а) створити послідовне з'єднаних ланок системи;
б) з'єднання контурів управління виконати з допомогою паралельного з'єднання; всю ланку управління розглядати як ланку від'ємного зворотного зв'язку.
3. Отримати наступну інформацію про створену модель:
а) знайти передаточну функцію системи;
б) знайти матриці рівнянь простору стану
в) знайти вектори значень полюсів і нулів системи;
4. Провести аналіз побудованої системи:
а) знайти відгук системи на одиничне імпульсне збурення;
б) визначити реакцію системи на вхідне збурення наступної форми:
t=0 : 0.0N : N; u=cos(t);
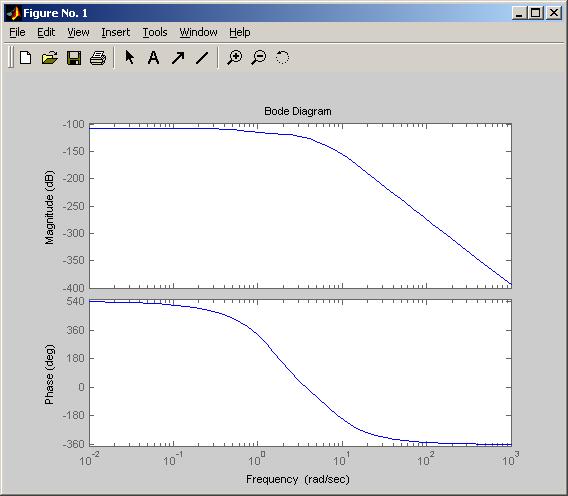
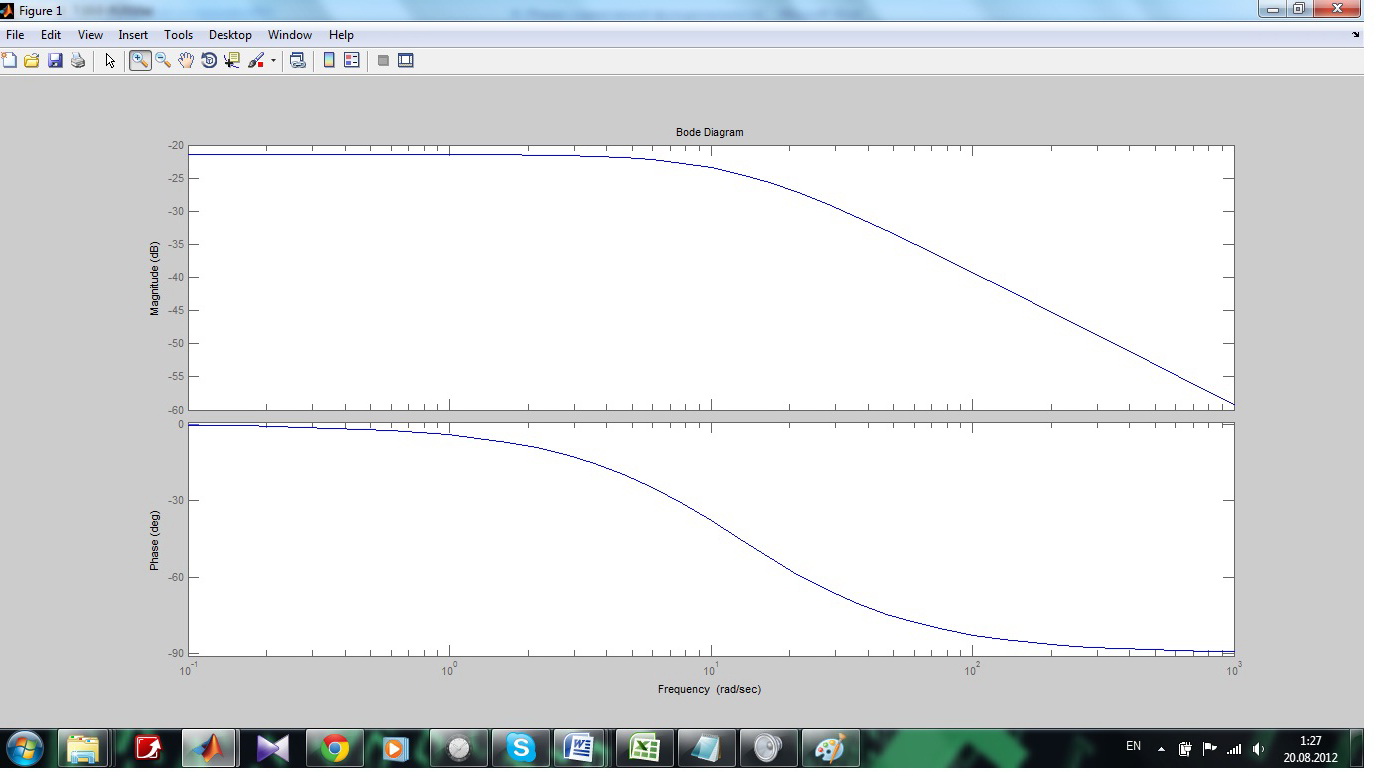
в) побудувати діаграму Боде системи;
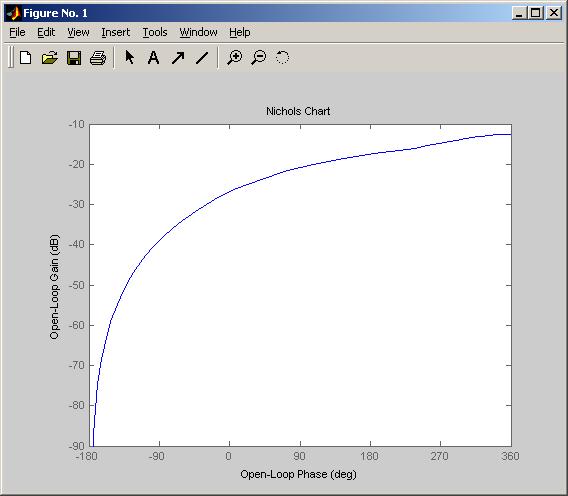
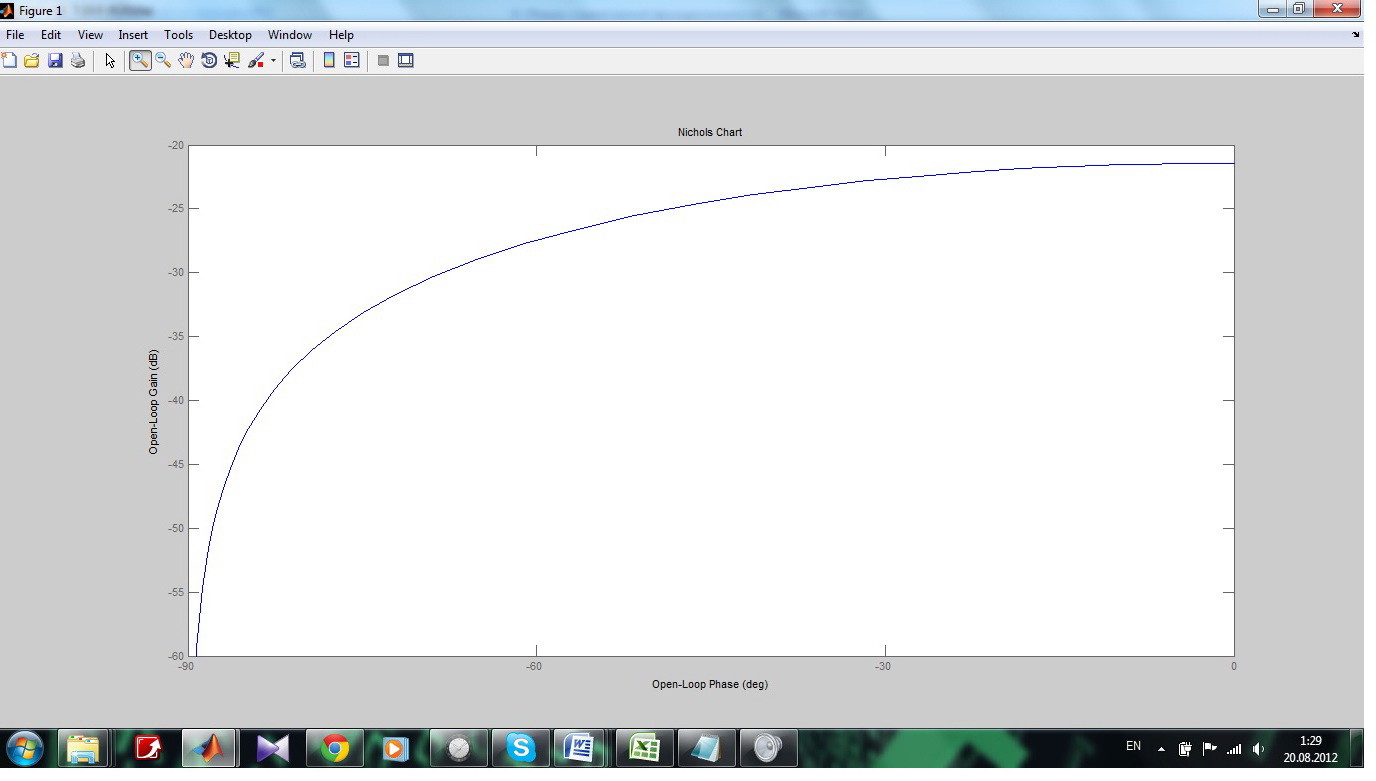
г) побудуємо карту Нікольса системи;
д) розрахувати полюси, нулі і коефіцієнти передачі системи;
е) обчислити Граміани системи та побудувати на комплексній площині карту розміщення нулів і полюсів системи
Розв’язок В Matlab:
>T=tf(1,[4 43]);
>>S=tf(44,[10]);
>>TS=series(T,S);
>> G1=tf(2,1);
>> G2=tf([3],[2 43 43]);
>>G=parallel(G1,G2);
>>sys=feedback (TS,G);
>> [c,z]=tfdata(sys,'v');
>>sssys=ss(sys);
>> [A,B,C,D]=ssdata(sssys);
>> [z,p,k]=zpkdata(sys,'v');
>>impulse(sys);
>>step(sys);
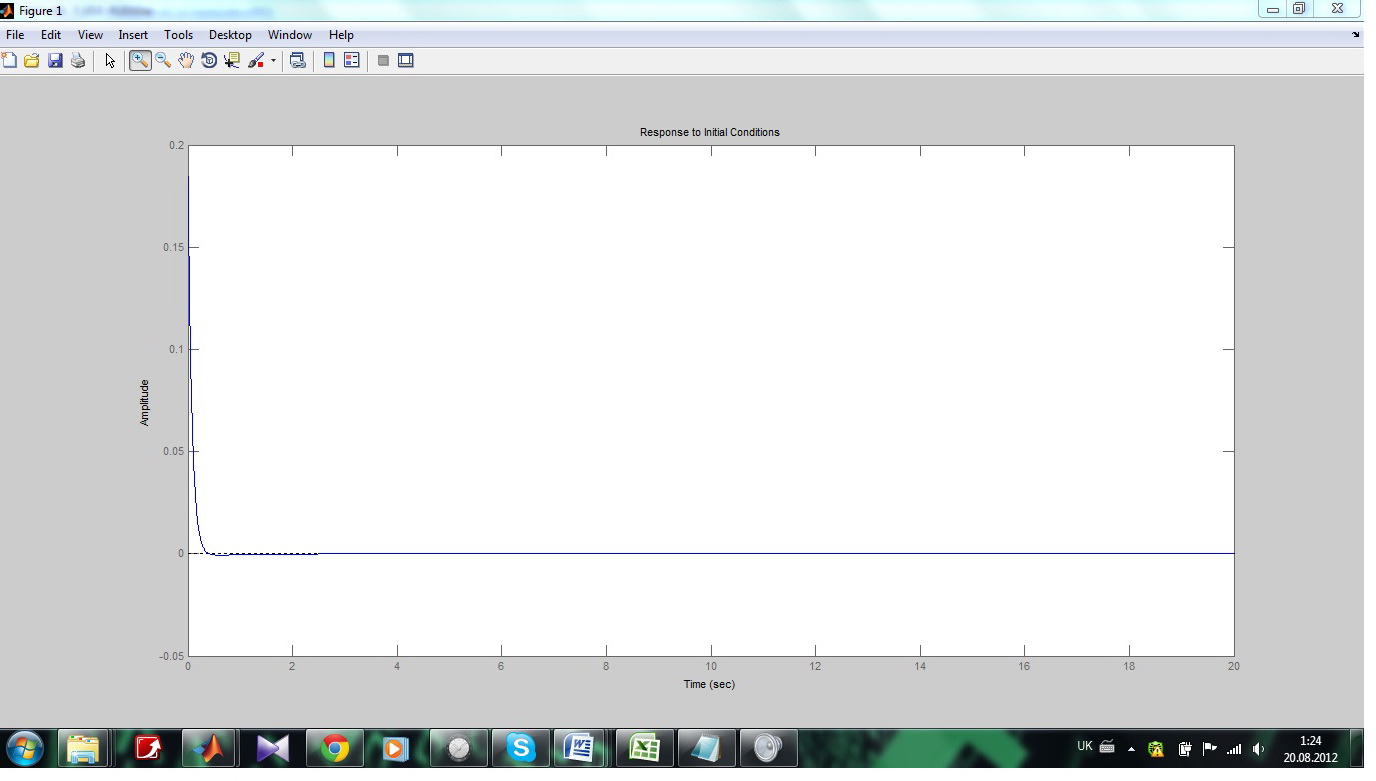
>>initial(sssys,[0 0 1],20);
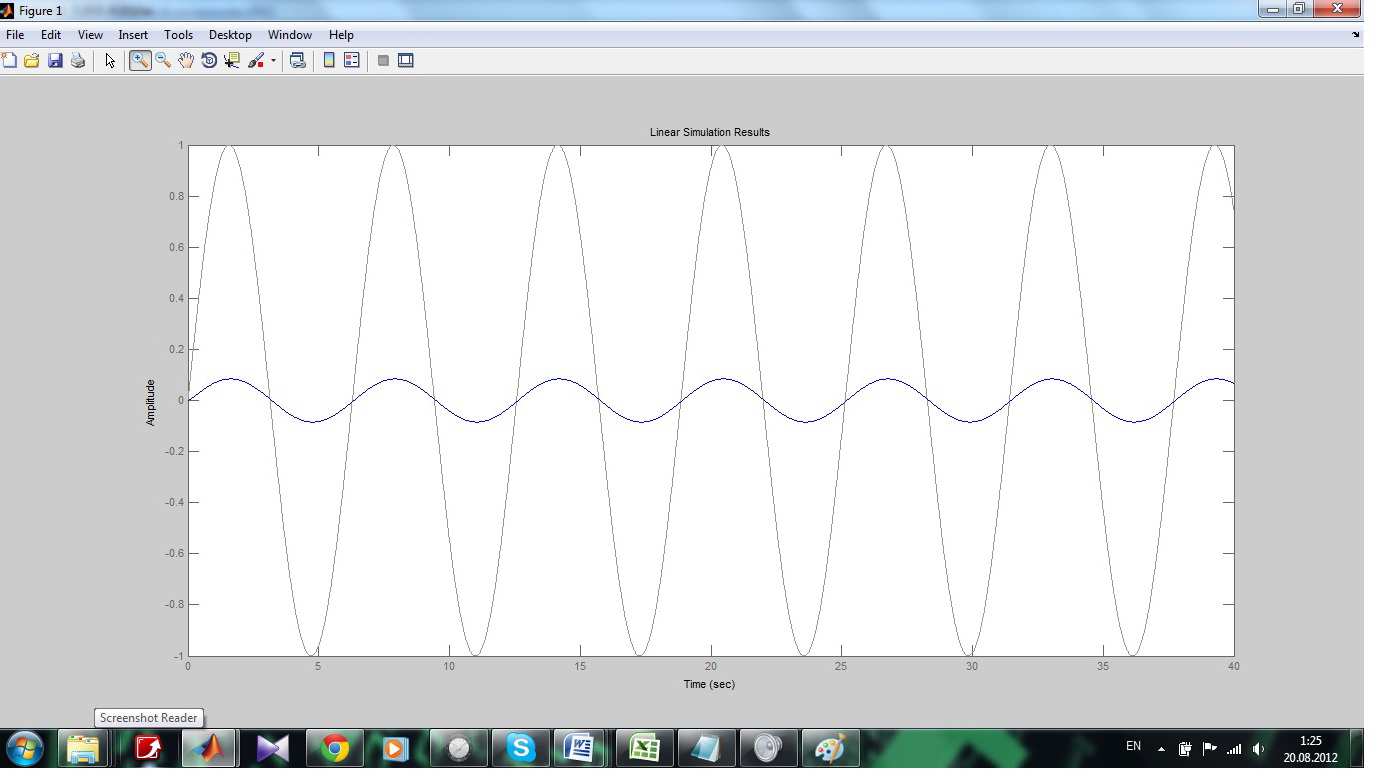
>> t=0:0.01:40; u=sin(t);
>>lsim(sys,u,t);
>>bode(sys);
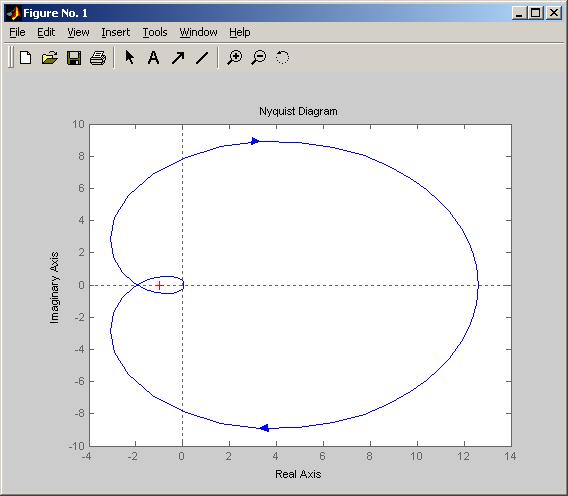
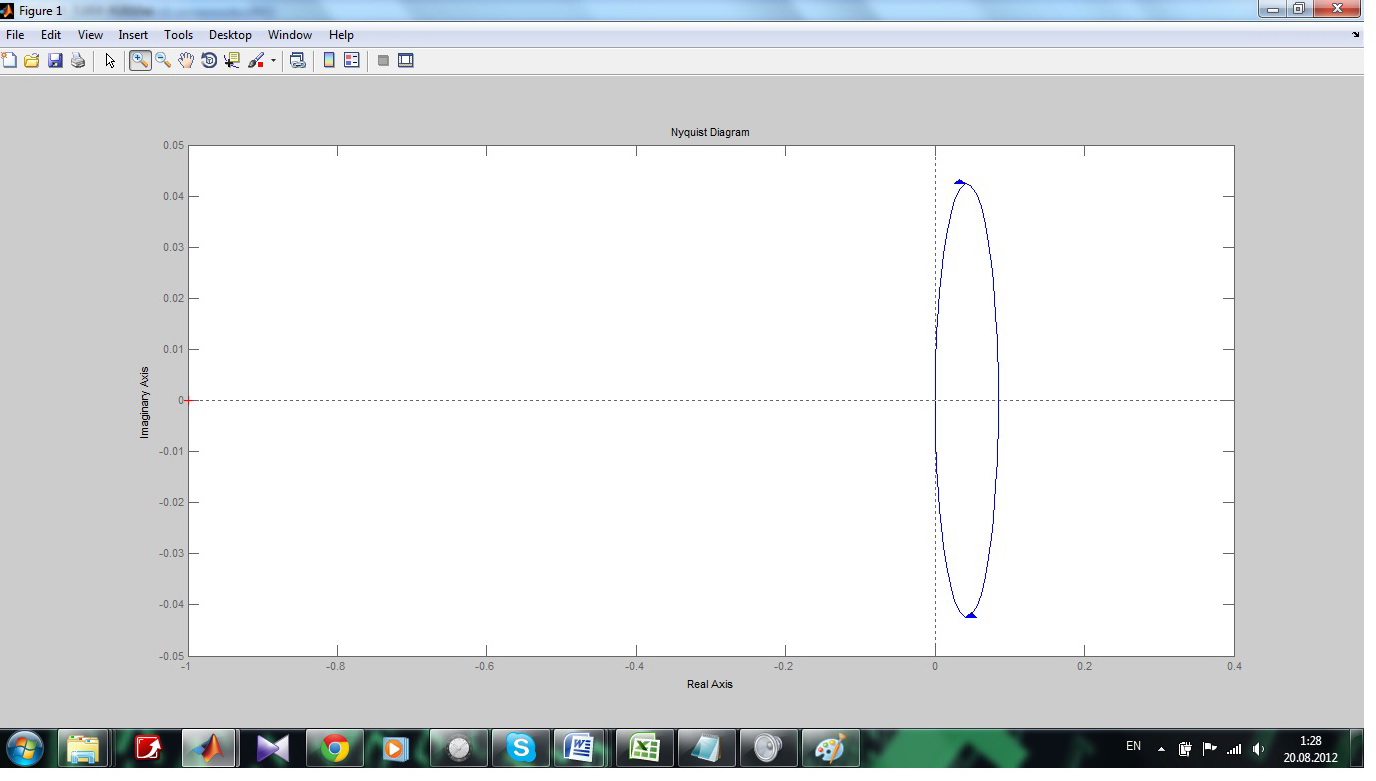
>>nyquist(sys);
>>nichols(sys);
>>pole(sys);
>>sysz=zpk(sys);
>> [z,p,k]=zpkdata(sysz,'v');
>>Wc=gram(sssys,'c');
>>Wc=gram(sssys,'o');
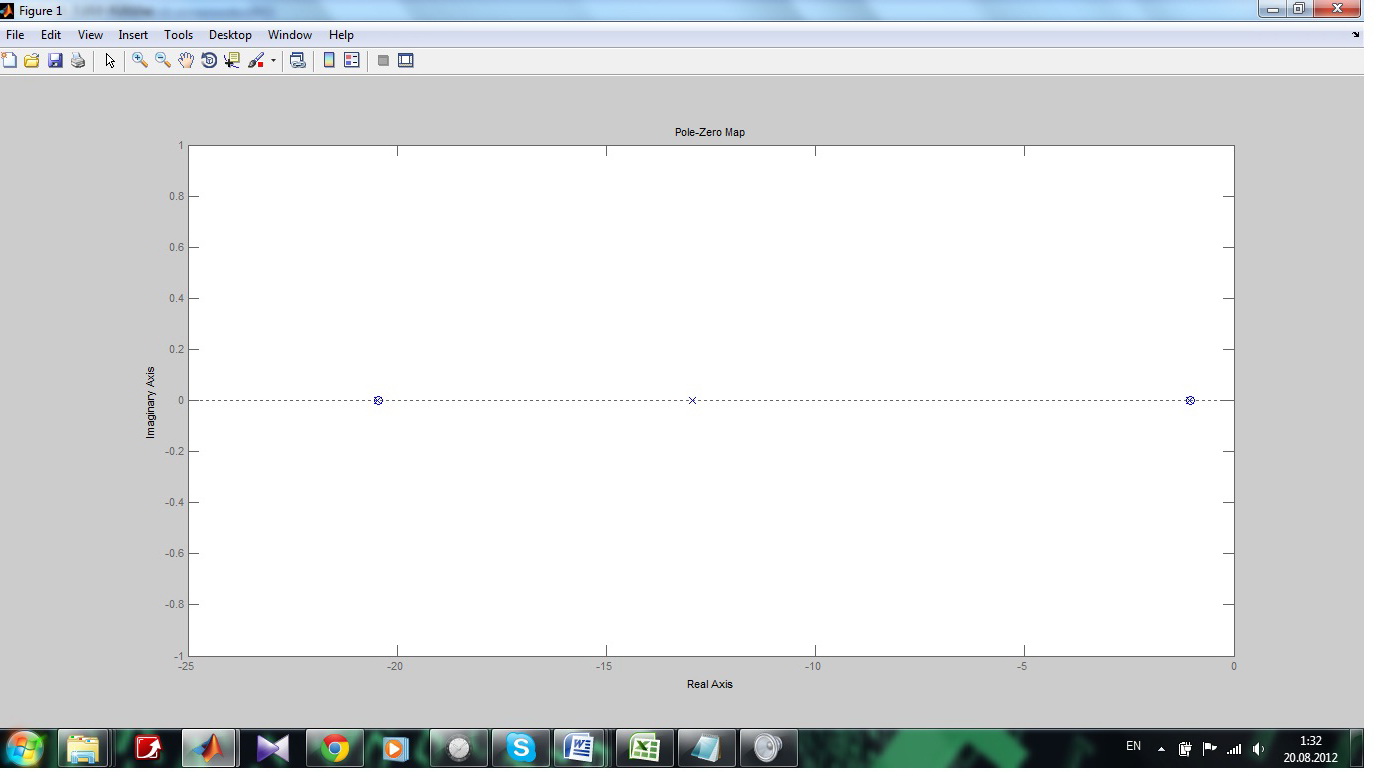
>>pzmap(sys);
>>damp(sys)
EigenvalueDampingFreq. (rad/s)
-1.06e+000 1.00e+000 1.06e+000
-1.29e+001 1.00e+000 1.29e+001
-2.05e+001 1.00e+000 2.05e+001
Графіки:
Модель:
Висновок :
Виконуючи дане завдання, було проведено моделювання лінійних систем, а також побудовано графіки impulse(sys); step (sys);
initial (sssys,[0 0 0 1],5); lsim(sys,u,t); bode(sys); nyquist(sys); nichols(sys); pzmap(sys).
Висновок з практики:
На практиці ми удосконалювали свої знання з таких програм та систем, як Matlab, Excel, Simulink, ElecrtonicsWorkbench, C++ та набували практичних навичок роботи з ними, розраховували рівняння та системи рівнянь, проводили моделювання процесів, одержані результати перевіряли з результатами при розрахунку аналітичним методом. Ми ще раз переконались, що розв’зуючи різними методами можна отримати однакові розв’язки, що є дуже необхідним в наш час.