

Оглавление.
1.Введение………………………………………………………………..2
2.Технические данные ………………………………………………….3
3. Поверочный расчет электродвигателя……………………………….4
4.Расчет и построение механических и электромеханических характеристик…………………………………………………………….7
5. Расчет механических нагрузок, приведенных к валу двигателя и моментов переключения…………………………………………………………….13
6. Расчет переходных процессов скорости,
момента и тока…………………………………………………………...13
7. Проверка двигателя по нагреву ……………………………………..17
8.Принципальные электрические схемы механизма подъема до и после модернизации…………………………………………………………….20
9.Характеристики электродвигателя после модернизации…………...22
10. Таблицы расчета механических и электромеханических характеристик……………………………………………………………25
1.Введение.
Целью курсового проекта является закрепление и углубление знаний полученных в процессе изучения дисциплины «Теория электропривода».А также приобретение практических навыков в работе с нормативными документами при расчете статических и динамических режимов работы электропривода для рационального выбора электрических аппаратов. В настоящем курсовом проекте описан технологический процесс портального мостового крана 10т-25-22,5.Выполнен анализ существующей системы управления электропривода. Произведён выбор элементов электропривода, расчёт его характеристик. В данной работе объектом управления является мостовой кран, рисунок 1.Особенностью этого механизма является его постоянная работа в переходных режимах, ввиду чего особенно важным является обеспечение необходимых благоприятных динамических характеристик.
2. Технические данные и принципиальная электрическая схема управления приводом подъема.
В данном курсовом проекте требуется произвести изменение системы управления двухбалочного мостового крана 10т-25-22,5 с кабины на управление с пола. При этом происходит замена многоскоростного управления на управление с одной скоростью. По функциональным возможностям – это перемещающийся кран. Общий вид крана представлен на рисунке 1.
![]()
Рисунок 1. Двухбалочный мостовой кран
Технические данные крана 10т-25-22,5.
Масса груза – 10 т.
Масса моста – 15,12 т.
Масса тележки с механизмами – 2,315 т.
Масса кабины управления – 0,33 т.
Массакабины вспомогательной – 0,065 т.
Массамеханизма передвижения – 1,92 т.
Массапрочего оборудования – 1,75 т.
Скорость подъема (номин.) – 8,55 (м/мин)
Скорость передвижения (миним.) – 70,5 (м/мин)
Скорость опускания (миним.) – 39,8 (м/мин)
Режимы работы крана:
Подъем груза – легкий
Передвижение крана – легкий
Передвижение тележки – легкий
Для удобства управления краном производят модернизацию системы крана с управления с кабины на управление с пола. Сокращается обслуживающий персонал, нет необходимости в специально обученном крановщике. Допускаются к управлению краном с пола или со стационарного пульта и к зацепке груза на крюк такого крана после соответствующего инструктажа и проверки навыков по управлению краном и строповке грузов в установленном владельцем крана порядке. К управлению кранами по радио допускаются рабочие, имеющие удостоверение крановщика-оператора, прошедшего обучение по программе для подготовки крановщиков-операторов.
Перевод управления крана на управление с пола осуществляется согласно рекомендациям руководящих документов РД 24.090.90-89.
После проведения реконструкции в паспорте крана делается запись о произведенной реконструкции.
Проведение работ по реконструкции крана производится на существующих крановых путях, без демонтажа крана.
После проведения реконструкции грузоподъемность, скоростные и геометрические параметры мостового крана остаются не измененными.
Эксплуатация крана после реконструкции проводиться в соответствии с вновь разработанной инструкцией по эксплуатации.
Управление направлением и скоростью вращения двигателей механизмов подъема, передвижения крана и передвижения тележки осуществляется с помощью силовых контроллеров ККТ 61, ККТ62.А непосредственное управление скоростью и направлением вращения двигателем осуществляется с помощью рычага. Для того чтобы управление производилось с пола меняем схему управления.
Механизм передвижения крана приводит во вращение асинхронный двигатель с фазным ротором типа МТН 112 – 6 У2, имеющий следующие номинальные параметры:
Таблица 2.
Наименование параметра |
Обозначение |
Величина |
Мощность на валу при ПВ 25 %, кВт |
P2 |
5,0 |
Скорость вращения, об/мин |
n2 |
930 |
Номинальный момент на валу, Н·м |
MНОМ |
51,3 |
Максимальный момент на валу, Н·м |
MМАКС |
137 |
Номинальное напряжение статорной обмотки, В |
U1 |
380 |
Ток статорной обмотки, А |
I1 |
14,4 |
Коэффициент мощности |
cosφ |
0,70 |
Коэффициент полезного действия, % |
η |
75,0 |
Ток статорной обмотки на холостом ходу, А |
I0 |
8,9 |
Коэффициент мощности на холостом ходу |
cosφ0 |
0,105 |
Напряжение роторной обмотки, В |
U2 |
216 |
Ток роторной обмотки, А |
I2 |
15,7 |
Активное сопротивление статорной обмотки при 80ºС, Ом |
r1.80º |
1,28 |
Индуктивное сопротивление статорной обмотки, Ом |
x1 |
1,74 |
Коэффициент рассеяния |
σ |
1,080 |
Активное сопротивление роторной обмотки при 80ºС, Ом |
r2.80º |
0,5 |
Индуктивное сопротивление роторной обмотки, Ом |
x2 |
0,906 |
Коэффициент приведения ротора к статору |
kПР |
2,56 |
Маховый момент ротора, кг·м |
GD2 |
0,27 |
Управление направлением и скоростью вращения двигателя осуществляется с помощью контакторов направления и силового контроллера ККТ 62(см. рисунок 9-2).
Сопротивление добавочных резисторов ротора по ступеням:
Р1-Р5 – 2,00 Ом;
Р5-Р6 – 19,6 Ом;
Р2-Р4 – 0,73 Ом;
Р4-Р6 – 9,75 Ом;
Р3-Р6 – 4,90 Ом.
|
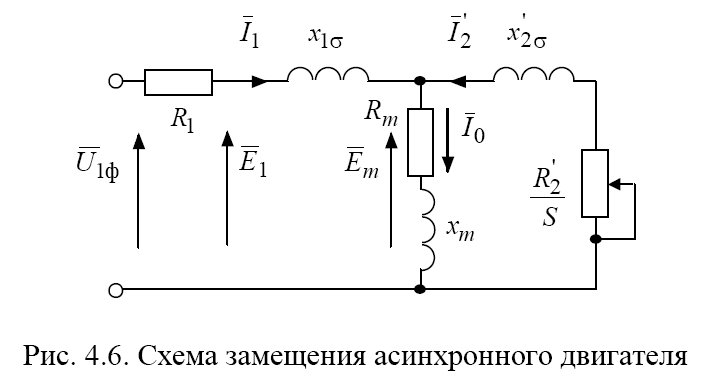
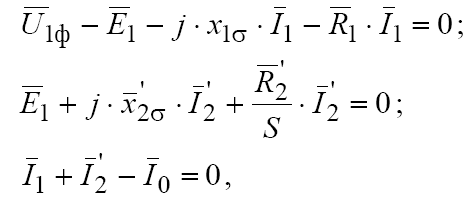
Рис.2 Схема замещения асинхронного двигателя
Основные уравнения асинхронного двигателя, соответствующие
принятой схеме замещения:
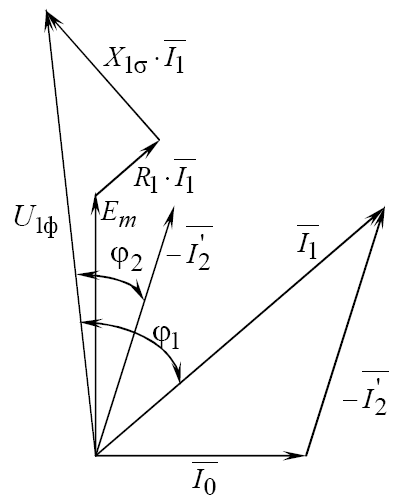
Векторная диаграмма токов, ЭДС и напряжений асинхронногодвига-
теля, удовлетворяющая системе уравнений, изображена на рис. 3
 рис
3 Векторная диаграмма токов
рис
3 Векторная диаграмма токов
Активное сопротивление ротора, приведенное к обмотке статора:
 Ом
Ом
Индуктивное сопротивление рассеяния обмотки ротора, приведен-
ное к обмотке статора:
 Ом
Ом
Индуктивное сопротивление короткого замыкания:
 Ом
Ом
Синхронная частота вращения n0для промышленной частоты сети
50 Гц равнаn0=1000 об/мин.
Добавочные сопротивления, вводимые в роторную цепь: 1с – 19,6 2с -9,75, 3с – 4,9 4с – 2,00 5с -0,73 . Приведенные активные сопротивления ротора рассчитываются по формуле

 -
номинальное скольжениедляе.м.х;
-
номинальное скольжениедляе.м.х;
 Н*м
– номинальный момент для е.м.х;
Н*м
– номинальный момент для е.м.х;
Расчет естественной механической характеристики двигателя произведем в соответствии с выражением:

Для всех ступеней сопротивлений получились следующие формулы зависимости момента от скольжения.
Зададимся параметрами скольжения S от 0 до 1 с шагом 0,01
Механические характеристики, рассчитанные в системе ExeL
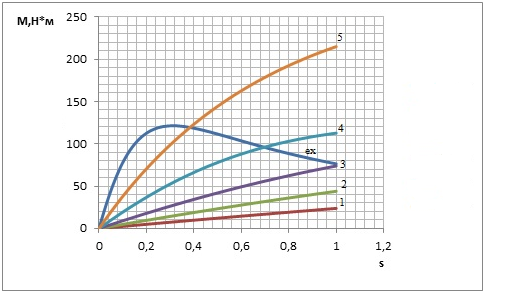
Рисунок 3. зависимость М=f(s)
Построим графики моментов от скорости. Скорость вращения ротора определяется по формуле: n2=1000*(1-s)
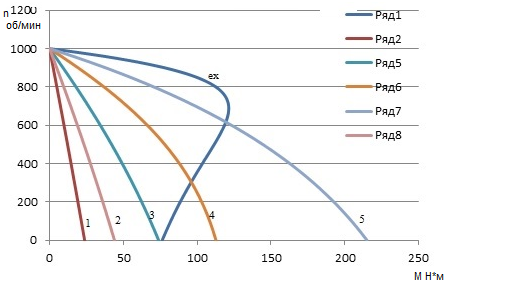
Рисунок 4. Зависимость n=f(M)
Из графика видно, что максимальный момент на валу двигателя (паспортные данные) меньше,чем электромагнитный критический момент двигательного режима Mкр, за счет потерь в самом двигателе.
Расчет электромеханических характеристик произведем по следующим формулам.
Найдем
эквивалентное активное сопротивление
схемы замещения в зависимости от
скольжения для каждой ступени сопротивления
по формуле

Затем полное эквивалентное сопротивление от скольжения
 ,
где xкз
– вышеуказанный параметр, не зависящий
от скольжения.
,
где xкз
– вышеуказанный параметр, не зависящий
от скольжения.
Вычислим cosφ для приведенной схемы
Вычислим приведенные активные и реактивные токи ротора

 2
2
где

Вычислим активную и реактивную составляющую тока холостого хода
 =8.9*0.105=0.93A
=8.9*0.105=0.93A
 =8.9*0.9944=8.85A
=8.9*0.9944=8.85A
Эти токи не зависят от величины скольжения и одинаковы на всех ступенях сопротивления.
Вычислим активную и реактивную составляющую тока статора.


Тогда ток статора рассчитаем по формуле

Зададимся параметрами скольжения S от 0 до 1 с шагом 0,01
Механические характеристики, рассчитанные в cистемеExel
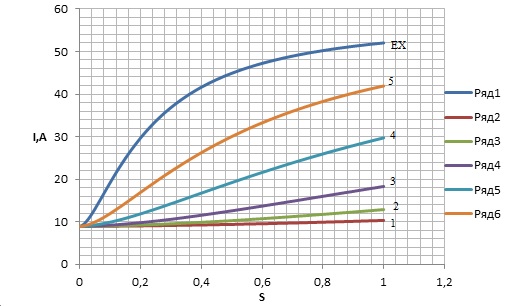
Рисунок 5. Зависимость I=f(s)
Построим графики моментов от скорости. Скорость вращения ротора определяется по формуле :n2=1000*(1-s).
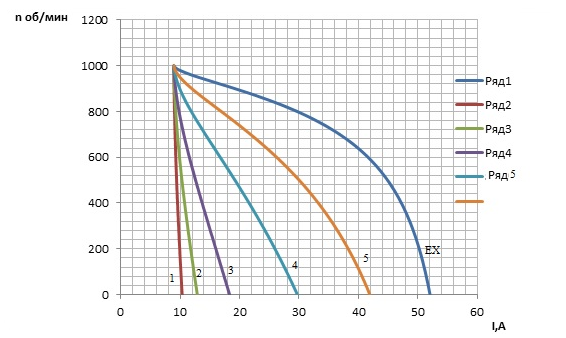
Рисунок 6. Зависимость n=f(I)
Расчет механических и электромеханических характеристик приведен в таблицах 3 и 4
На основании паспортных данных и математической модели двигателя были построены механические и электромеханические характеристики для каждой ступени добавочных сопротивлений. Значения номинального тока статора, номинального и критического моментов асинхронного двигателя, определенные по его естественным характеристикам, практически совпадают со значениями, приведенными в каталожных данных, поэтому номинальные параметры асинхронного двигателя и параметры его схемы замещения не противоречат друг другу.