Эквивалентные схемы механоэлектрических преобразователей.
Механоэлектрические преобразователи преобразуют механические перемещения или угол поворота в электрический сигнал и по принципу действия могут быть контактными, реостатными, тензометрическими, индуктивными, емкостными, пьезоэлектрическими, фотоэлектрическими и т. д.
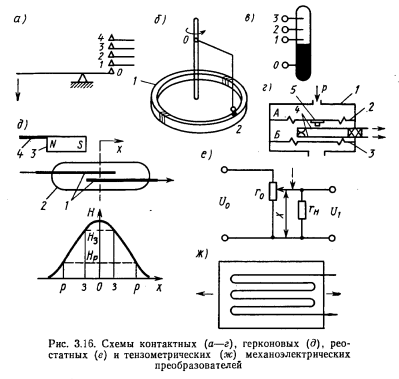
На рис. 3.16, г представлена принципиальная схема дискретного мембранно-контактного механоэлектрического преобразователя. Исходное механическое перемещение мембраны осуществляется под действием давления воздуха. В диэлектрическом корпусе 1 устанавливаются две легкие мембраны 2 и 3 так, что образуется камера А, к которой подводится давление р, и герметизированная камера Б, в которой устанавливается стандартная контактная группа 4 от реле типа РСМ.
Недостатками контактных преобразователей являются сравнительно низкая надежность и невозможность непрерывного преобразования контролируемой величины.
Стабильность и надежность работы контактных преобразователей определяются в основном материалом и конструкцией контактов.
Реостатные преобразователи выполняют непрерывное преобразование линейных или угловых перемещений в электрические величины. На рис. 3.16, е изображена схема потенциометрического (реостатного) преобразователя, нагруженного на сопротивление Rн.
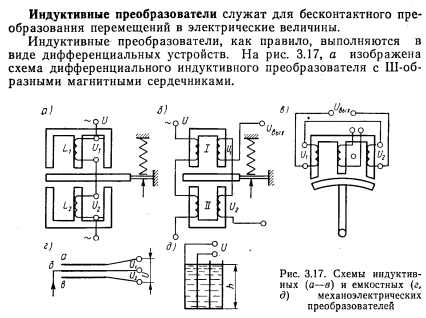
Индуктивные преобразователи, как правило, выполняются в виде дифференциальных устройств. На рис. 3.17, а изображена схема дифференциального индуктивного преобразователя с Ш-об-разными магнитными сердечниками.~~На рис. 3.17, б изображен трансформаторный индуктивный преобразователь, отличающийся от рассмотренного тем, что у него разделены цепь питания и выходная цепь.
Эквивалентные схемы электромеханических преобразователей с эм связью.
Электромеханические преобразователи — это класс устройств, созданных для преобразования электрической энергии в механическую и наоборот. Также возможно преобразование электрической энергии в электрическую энергию другого рода.
Основные электромеханические преобразователи
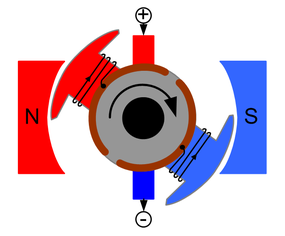
Электрические машины - совершают однонаправленное непрерывное преобразование энергии. Все электрические машины являются обратимыми (могут быть как генераторами, так и двигателями).
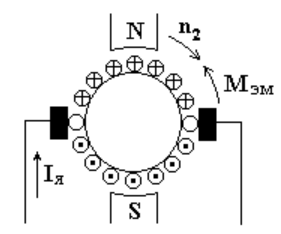
Рис. Электрическая машина постоянного тока.
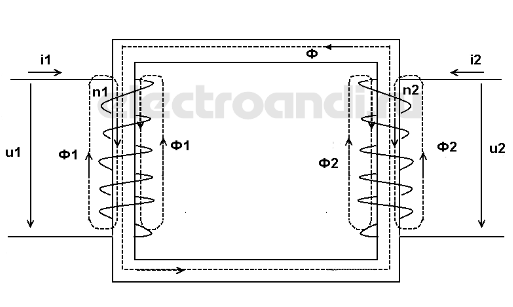
Трансформатором называется статическая электрическая машина, способная преобразовывать электрическую энергию из одного вида в другой, изменяя её основные параметры — напряжение, мощность, силу тока или частоту.
Основным параметром любого трансформатора является коэффициент трансформации — величина, равная отношению значений изменяемого параметра.
Синхронная машина — это такая электрическая машина переменного тока, в которой частота вращения ротора равна частоте изменения электромагнитного поля статора.
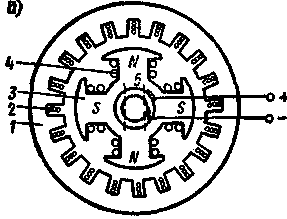
Рис. Синхронная машина с неподвижным якорем.
1 - якорь; 2 - обмотка якоря; 3 - полюсы индуктора; 4 - обмотка возбуждения;
Асинхронной машиной называют такую электрическую машину, в которой частота вращения ротора меньше частоты изменения электромагнитного поля статора. Эта разница называется скольжением.
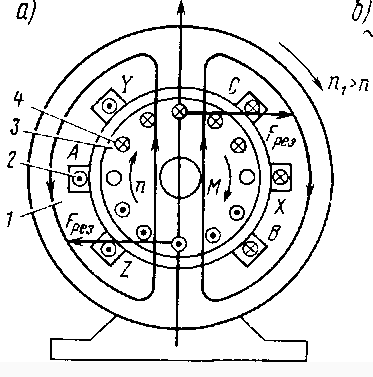
Рис. Асинхронный двигатель.
Состоит из неподвижной части статора 1, на котором расположены обмотка 2 статора, и вращающейся части — ротора 3 с обмоткой 4.
Машина постоянного тока — электрическая машина, преобразующая энергию в два этапа: электрическую энергию постоянного тока в электрическую энергию переменного тока и далее электрическую энергию переменного тока в механическую энергию на валу двигателя.