

13)Продолжение
Реостатный пуск дпв.
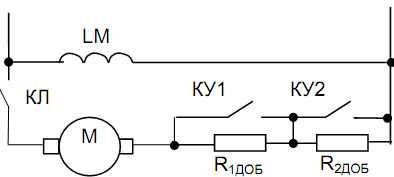
На рис. 3.12 приведена схема силовых цепей реостатного пуска двигателя. Реостатный пуск предусматривает при подаче напряжения на якорную цепь введение добавочного сопротивления, ограничивающего величину тока якоря допустимым значением по технологическим условиям пуска. На рис. 3.13 приведены механические характеристики, обеспечивающие пуск двигателя. При замыкании контактора КЛ протекает ток I1 через обмотку якоря и добавочные сопротивления R-доб1 и Rдоб2, создается момент М1. Двигатель разгоняется по характеристике 1, ток якоря снижается, и при скорости ω1 и моменте переключения М2 включается контактор КУ1, шунтируя R^ob. Двигатель переводится на характеристику 2. Ток якоря вновь увеличивается до значения I1, момент - до М1. Происходит разгон по характеристике 2 до скорости ы2, где при моменте переключения М2 включается контактор КУ2, переводя двигатель на естественную характеристику. На этой характеристике продолжается разгон до скорости ω2, где при М = Мс двигатель переходит в установившийся режим работы. В процессе разгона двигателя добавочное сопротивление уменьшают по величине, обеспечивая переключение ступеней пусковых сопротивлений по правильной пусковой диаграмме. Переключение ступеней выполняется автоматически в функции времени, тока, скорости.
16) 17) 18 (Продолжение 5 уровень 12 вопрос)) Регулирование скоростей асинхронного электродвигателя.
Скорость вращения ротора асинхронного двигателя определяется выражением n = no (1 — S) = (f1∙60)(1 — S)/p. скорость асинхронного двигателя можно регулировать изменением какой-либо из трех величин: числа пар полюсов р; частоты f1 тока питающей сети; скольжения S. Изменение числа полюсов электродвигателя. Для возможности изменения числа пар полюсов электродвигателя статор его выполняют либо с двумя самостоятельными трехфазными обмотками, либо с одной трехфазной обмоткой, которую можно пересоединять на различные числа полюсов. Катушки создают четыре магнитных полюса. Те же катушки, соединенные параллельно между собой, создадут только два полюса. Пересоединение обмоток статора производится при помощи специального аппарата – контроллера. При этом способе регулировка скорости вращения двигателя совершается скачками. На практике встречаются двигатели, синхронные скорости вращения no которых могут быть равны 3000, 1500, 1000 и 750 оборотов в минуту. Регулировку скорости вращения двигателя путем изменения числа полюсов можно производить только у асинхронных двигателей с короткозамкнутым ротором. Ротор с короткозамкнутой обмоткой может работать при разных числах полюсов магнитного поля. Наоборот, ротор двигателя с фазной обмоткой может работать нормально лишь при определенном числе полюсов поля статора. Иначе обмотку ротора также пришлось бы переключать, что внесло бы большие усложнения в схему двигателя.
Изменение частоты переменного тока. При этом способе частоту переменного тока, подводимого к обмотке статора двигателя, изменяют при помощи специального преобразователя частоты. Регулировку изменения частоты тока выгодно производить, когда имеется большая группа двигателей, требующих совместного плавного регулирования скорости вращения (рольганги, текстильные станки и т. п.). Этот способ регулирования скорости мало распространен ввиду сложности его осуществления.
Введение сопротивления в цепь ротора. Во время работы двигателя в цепь обмотки ротора вводят сопротивление регулировочного реостата. С увеличением активного сопротивления цепи ротора возрастает величина скольжения S, соответствующая заданному значению вращающего момента М (величина вращающего момента, развиваемого двигателем, равна моменту сопротивления на валу двигателя). Таким образом, вводя дополнительно активное сопротивление в цепь фазного ротора, мы увеличиваем скольжение S и, следовательно, снижаем скорость вращения ротора n. Такой способ регулирования применим только для асинхронных двигателей с фазным ротором. Регулировочный реостат включают в цепь ротора так же, как и пусковой реостат. Недостатком этого способа регулирования является то, что в регулировочном реостате происходит значительная потеря мощности, тем большая, чем шире регулировка скорости вращения двигателя.
Реверсирование асинхронных электродвигателей. Для изменения направления вращения (реверсирование) асинхронного двигателя следует поменять местами два любых провода из трех, идущих к обмоткам статора двигателя. При этом меняется направление вращения магнитного поля статора и двигатель станет вращаться в другую сторону. Реверсирование двигателя может быть произведено при помощи переключателя (перекидного рубильника), магнитного пускателя и других устройств.
Торможение асинхронных двигателей. В условиях эксплуатации нередко возникает необходимость торможения двигателя с целью ускорить его остановку. Торможение электродвигателей может быть механическим, электрическим и электромеханическим. Если при работе двигателя переключить две любые фазы, то при этом двигатель начнет развивать вращающий момент, направленный в обратную сторону. Вращение ротора замедляется. Когда скорость вращения приближается к нулю, следует отключить двигатель от сети, в противном случае под действием развиваемого момента он начнет вращаться в противоположном направлении..
24)