

1)
Основное уравнение движения электропривода.
При переменных статических моментах и моментах инерции, зависящих от
скорости, времени, угла поворота вала двигателя (линейного перемещения РО), уравнение движения электропривода записывается в общем виде:
![]()
При
постоянном моменте инерции
![]() уравнение
упрощается
уравнение
упрощается
![]()
Его называют основным уравнением движения.
Правую
часть уравнения
![]() называют
динамическим
называют
динамическим
моментом.
Знак
![]() определяет знак производной
определяет знак производной
![]() и
состояние
и
состояние
электропривода:
![]()
– двигатель разгоняется;
![]()
-![]() двигатель снижает скорость;
двигатель снижает скорость;
– установившийся режим работы двигателя, его скорость неизменна.
Темп разгона зависит от момента инерции ܬ электропривода, определяющего
способность механической части электропривода запасать кинетическую
энергию
Для анализа режимов работы и решения задач удобнее записать основное
уравнение движения в относительных единицах (о.е.). Приняв за базовые
з![]() начения
момента Мб=Мн – номинальный электромагнитный
момент двигателя, скорости ωб=ωон –
скорость идеального холостого хода
при номинальном напряжении на якоре
и номинальном токе возбуждения,
основное уравнение движения в о.е.
записывается в виде
начения
момента Мб=Мн – номинальный электромагнитный
момент двигателя, скорости ωб=ωон –
скорость идеального холостого хода
при номинальном напряжении на якоре
и номинальном токе возбуждения,
основное уравнение движения в о.е.
записывается в виде
![]()
![]() где
механическая постоянная времени
электропривода, учитывающая и приведенный
момент инерции РО. Наличие в уравнении
где
механическая постоянная времени
электропривода, учитывающая и приведенный
момент инерции РО. Наличие в уравнении
![]() свидетельствует о записи уравнения в
о.е. Для расчета и построения нагрузочных
диаграмм М(t)и
ω(t)
используется
свидетельствует о записи уравнения в
о.е. Для расчета и построения нагрузочных
диаграмм М(t)и
ω(t)
используется
решение основного уравнения движения
из
которого для конечных приращений при
![]()
для
заданного
![]() получим
приращение скорости
получим
приращение скорости
и
значение скорости в конце участка
![]()
2)
3)
Характеристики дпт с независимым возбуждением.
Характерной особенностью таких двигателей является независимость тока возбуждения (или потока возбуждения) от тока якоря машины. Разновидностью независимого возбуждения является возбуждение от постоянных магнитов.
Механические характеристики ДПТ с независимым возбуждением:
С учётом того, что
![]() и
и
![]() или
или

основное уравнение ДПТ в двигательном режиме работы
![]()
можно привести к виду
![]()
Разрешив последнее уравнение относительно n, получим уравнение механической характеристики ДПТ с независимым возбуждением в виде
![]()
или
![]() ,
,
где
![]() - скорость идеального холостого хода
машины,
- скорость идеального холостого хода
машины,
![]() -изменение скорости, обусловленное
моментом нагрузки двигателя.
-изменение скорости, обусловленное
моментом нагрузки двигателя.
Сама механическая характеристика ДПТ с независимым возбуждением приведена на рис.6.6 и представляет собой прямую линию, наклон которой к оси абсцисс зависит от величины потока возбуждения и сопротивления якоря Rя. Чем меньше величина потока возбуждения и чем больше сопротивление Rя, тем круче механическая характеристика.
Как следует из уравнения механической характеристики, скорость двигателя при постоянном моменте нагрузки можно регулировать тремя способами:
1.Изменением напряжения на якоре двигателя,
2.Изменением сопротивления в цепи якоря двигателя,
3.Изменением потока возбуждения машины.
При регулировании скорости первым из названных способов, напряжение на якоре изменяется либо с помощью реостата (рис.6.7,а), либо с помощью усилительно –преобразовательного устройства (рис.6.7,б), при этом поток возбуждения остаётся постоянным.
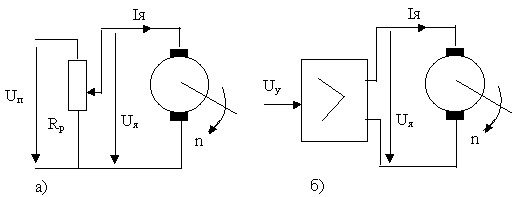
Рис. 6.7, a, б
Семейство механических характеристик, соответствующих данному способу регулирования, приведено на рис.6.8.
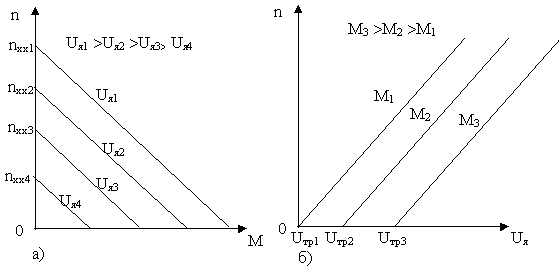
Рис. 6.8, а, б
С изменением напряжения U пропорционально изменяется и скорость холостого хода
![]()
при этом угол наклона (или жестокость) механических характеристик остаётся неизменной.
4)