

Точность омс.
Радиальная погрешность определяется формулой:
![]() (4.4)
(4.4)
Т.к. наблюдения равноточные, то mлп1 = mлп2 = mh/g = 1'. Следовательно, минимальная радиальная погрешность принимает значение Mo = 1,4 мили при разности азимутов А 90°.
Достоинства и недостатки способа.
Самый простой способ обсервации. Данный способ учитывает только случайные погрешности. В лучшем случае точность обсервации составляет 1,4 - 1,5 м.мили. При действии систематической погрешности точную обсервацию получить невозможно. Влиянии систематической погрешности на ОМС будет рассмотрено в следующем параграфе.
3.9. Определение места судна по трем светилам.
Метод весов.
Два варианта ОМС по трем светилам.
Оценка точности ОМС по избыточным ВЛП.
Достоинства и недостатки ОМС по трём светилам.
Метод весов.
Если число измеряемых навигационных параметров больше определяемых координат, то такие измерения называются избыточными. Избыточные измерения позволяют повысит точность обсервации и проконтролировать измерения на промахи. Т.к. измерения отягощены погрешностями, то высотные линии положения не пересекаются в одной точке, а образуют фигуру погрешностей. Известно, что погрешности подразделяются на случайные и систематические.
Чтобы учесть действие случайных погрешностей, надо применить метод весов (графический способ метода наименьших квадратов).
Чтобы исключить систематические погрешности, надо провести астрономические биссектрисы.
Метод весов заключается в том, что каждой вершине фигуры погрешностей приписывется вес, вычисляемый по формуле
Pij = 10sin2 Aij
Aij - разность азимутов между i-ым и j-м светилами. Максимальный вес достигает 10 единиц при разности азимутов 90°. Вес показывает степень точности точки пересечения между ВЛП - чем выше вес, тем выше точность данной точки.
Д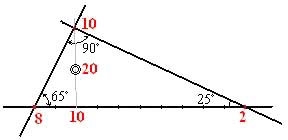 ля
нахождения вероятнейшего места веса
последовательно складываем центрографическим
методом, т.е. находим центр тяжести
фигуры, состоящей из невесомых стержней,
в вершинах которой приложены найденные
веса. Для данного примера складываем
сначала веса 2 и 8, разделив сторону на
2 + 8 = 10 отрезков и отложив от большего
веса (8) число отрезков, равным меньшему
весу (2) и получаем точку с весом 10. Далее
складываем два веса по 10, получив
посредине между ними обсервованную
точку с весом 20.
Место по весам всегда
получается внутри
треугольника и лежит ближе к короткой
стороне и ближе к прямому углу.
ля
нахождения вероятнейшего места веса
последовательно складываем центрографическим
методом, т.е. находим центр тяжести
фигуры, состоящей из невесомых стержней,
в вершинах которой приложены найденные
веса. Для данного примера складываем
сначала веса 2 и 8, разделив сторону на
2 + 8 = 10 отрезков и отложив от большего
веса (8) число отрезков, равным меньшему
весу (2) и получаем точку с весом 10. Далее
складываем два веса по 10, получив
посредине между ними обсервованную
точку с весом 20.
Место по весам всегда
получается внутри
треугольника и лежит ближе к короткой
стороне и ближе к прямому углу.

Два варианта омс по трем светилам.
Рассмотрим
два варианта расположения трёх светил
и ОМС по этим светилам.
Первый
вариант.
Пусть
светила расположены равномерно по всему
горизонту с разностью азимутов
А
= 120°. Фигура погрешностей будет собой
представлять равносторонний треугольник.
Веса вершин будут равны 7. ОМС по весам
будет в центре треугольника на пересечении
биссектрис (высот, медиан). Астрономические
биссектрисы также пересекаются внутри
треугольника.
В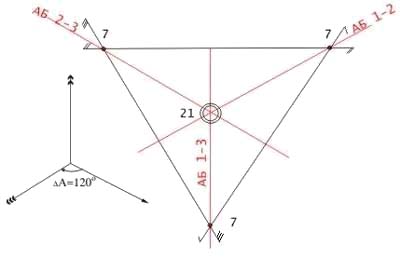 ывод:
ОМС по весам совпадает с ОМС по
астрономическим биссектрисам,
следовательно, это самый идеальный
вариант ОМС по 3-м светилам.
Если
светила располагаются ассиметрично,
но по всему горизонту, то точки по весам
и по астрономическим биссектрисам будут
располагаться внутри треугольника
вблизи друг от друга.
ывод:
ОМС по весам совпадает с ОМС по
астрономическим биссектрисам,
следовательно, это самый идеальный
вариант ОМС по 3-м светилам.
Если
светила располагаются ассиметрично,
но по всему горизонту, то точки по весам
и по астрономическим биссектрисам будут
располагаться внутри треугольника
вблизи друг от друга.
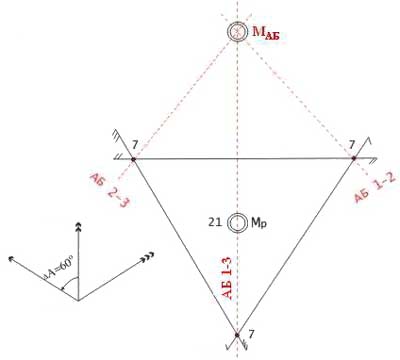
Второй вариант. Светила располагаются в одной части горизонта, разность между крайними азимутами составляет А = 120°, а между соседними - А = 60°. Фигура погрешностей также представляет собой равносторенний треугольник, в вершинах которого располагаются веса, равные 7. Поэтому ОМС по весам получается внутри треугольника (точка Мр). Астрономические биссектрисы же в этом случае пересекаются вне треугольника. (точка МАБ). Вывод: это самый неблагоприятный вариант расположения светил, поэтому надо исключить такой вариант расположения светил. Если же в силу гидрометеофакторов приходиться измерять высоты светил с такой конфигурацией азимутов, то для выбора ОМС необходимо руководствоваться следующими принципами:
Обсервованное место выбираем по принципу "Считай себя ближе к опасности".
Если обсервация получена в океане и треугольник погрешностей образовался небольшим со сторонами не превышающими 1,5 м.миль, то считаем, что он образовался за счет действия случайных погрешностей (mВЛП = ±1,0 м.миль), поэтому обсервацию принимаем внутри треугольника, т.е. по весам.
Если треугольник погрешностей оказался большим (стороны треугольника более 2 м.миль), то считаем, что он образовался за счет действия систематических погрешностей, поэтому обсервация принимается по астрономическим биссектрисам вне треугольника.