

Свойства влп.
1. ВЛП - это приближенная линия. Из рисунка видно, что чем меньше измеряемая высота, тем больше радиус круга равных высот и тем на большем участке ВЛП совпадает с КРВ. Чем больше высота, тем меньше радиус изолинии, следовательно, на меньшем участке происходит совпадение изолинии и ВЛП. Для того чтобы ошибка обсервации была бы минимальной от замены изолинии ВЛП при ОМС высоты светил не должны превышать 50° - 60° и в этом случаи ошибки от замены изолиний ВЛП не будет. Чтобы не было соблазна считать большие счислимые высот в таблицах ВАС-58 по таблице 1 невозможно рассчитать поправки для высот более 73°.


По этой причине методу ВЛП присуше методическая погрешность. Построив две ВЛП, получим обсервованную точку Мо, точку пересечения 2-х ВЛП. Но на самом деле судно находится в точке пересечения изолиний в М1. Методическая погрешность будет тем больше, чем больше высоты светил и чем больше переносы. Чтобы свести к минимуму методическую погрешность, необходимо определяться по светилам с небольшими высотами, а если это невозможно, то применять метод последовательных приближений (метод иттераций). Получив на первом этапе обсервованную точку Мо, принимаем её за счислимую, и повторяем сначала процесс вычислений. Обычно на 2-ом или 3-ьем шаге вычислений получается обсервованная точка, практически совпадающая с точкой пересечения по изолиниям. Естественно, что процесс последовательных приближений выполняется не вручную, а на компьютере по специально разработанной программе, в основе которой лежит аналитическим метод. Этот метод будет рассмотрен ниже
2. Градиент ВЛП равен 1. Вспомним ещё одно определение градиента
![]()
где U - изменение навигационного параметра, n - смещение линии положения вследствии изменения навигационного параметра на величину U. Т.к. градиент равен единице, то любая погрешность в высоте h вызывает смещение ВЛП параллельно самой себе на величину n = h.
3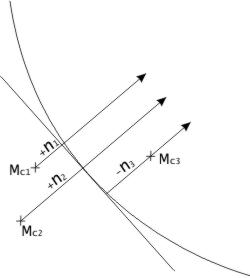 .
Положение
ВЛП на карте не зависит от принятых
счислимых координат.
(Это
самое важное свойство ВЛП). Из предыдущего
параграфа мы знаем, что положение КРВ
определяется только обсервованной
высотой ho
и координатами полюса освещения.
Следовательно, в определенный момент
времени для заданного светила с измеренной
высотой ho
положение КРВ остается неизменным. Т.к.
ВЛП это кассательная к кругу равных
высот, то и положение ВЛП остается
неизменным. Это означает, что при
вычислении элементов ВЛП для различных
счислимых точек Мс1,
Мс2
и Мс3,
но для одних и тех же значений величин
ho,
tгр
и
,
получим разные значения переносов ni
= ho
- hci.
Однако в результате прокладки из всех
счислимых точек будет получена одна и
та же ВЛП.
Это свойство позволяет
производить ОМС в независимости от
точности счисления. На этом свойстве
основан метод перемещенного места,
который является составной частью
ускоренных способов астрономических
обсерваций.
.
Положение
ВЛП на карте не зависит от принятых
счислимых координат.
(Это
самое важное свойство ВЛП). Из предыдущего
параграфа мы знаем, что положение КРВ
определяется только обсервованной
высотой ho
и координатами полюса освещения.
Следовательно, в определенный момент
времени для заданного светила с измеренной
высотой ho
положение КРВ остается неизменным. Т.к.
ВЛП это кассательная к кругу равных
высот, то и положение ВЛП остается
неизменным. Это означает, что при
вычислении элементов ВЛП для различных
счислимых точек Мс1,
Мс2
и Мс3,
но для одних и тех же значений величин
ho,
tгр
и
,
получим разные значения переносов ni
= ho
- hci.
Однако в результате прокладки из всех
счислимых точек будет получена одна и
та же ВЛП.
Это свойство позволяет
производить ОМС в независимости от
точности счисления. На этом свойстве
основан метод перемещенного места,
который является составной частью
ускоренных способов астрономических
обсерваций.