

3.5. Теоретические основы определения места судна астрономическим методом.
Основные понятие и определения.
Уравнение круга равных высот.
Графический метод ОМС по 2-м КРВ на земном глобусе.
Основные понятие и определения.
Рассмотрим принципы определения места судна (ОМС) астрономическими методами. В мореходной астрономии для ОМС с достаточной точностью измеряются высоты светил. Высота - является навигационным параметром.
Навигационным параметром называется геометрическая величина, зависящая известным образом от положения точки на земной сфере и измеряемая для ОМС.
Любой навигационный параметр задает изолинию.
Изолинией называется геометрическое место точек, в которых навигационный параметр является постоянной величиной.
Каждая изолиния описывается уравнением, в котором связаны текущие координаты изолинии, измеренный навигационный параметр и координаты ориентира (в мореходной астрономии - светила). Разберемся с этими основными понятиями в мореходной астрономии. Рассмотрим следующий рисунок северной части небесной сферы, в центре которой располагается северная часть земной полусферы. По определению небесной сферы плоскости земного и небесного экватора совпадают, продолжение земной оси вращения - есть ось мира небесной сферы. Центры земной сферы и земной сферы совпадают. На небесной сфере расположено светило С. Спроецируем светило С по отвесной линии на земную поверхность.
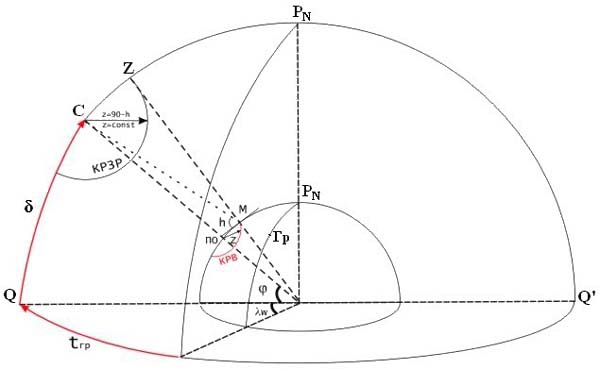
Полюсом освещения (ПО) называется проекция светила по отвесной линии на земную поверхность. Установим взаимосвязь между координатами полюса освещения и координатами светила. Из рисунка видно, что
по = W по = tгр (4.1)
Находясь в точке М на земной поверхности, наблюдатель в гринвичское время Тгр измеряет высоту h светила С. Z - есть зенит наблюдателя в точке М. Тогда дуга ZC - есть зенитное расстояние z = 90 - h данного светила. Из светила С радиусом r = z = 90 - h проведем малый круг, в точках которого зенитные растояния до светила есть постоянная величина. Поэтому этот малый круг называется круг равных зенитных расстояний = КРЗР. Спроецирем КРЗР на земную поверхность и получим круг равных высот = КРВ, т.е. изолинию измеренной высоты - геометрическое место точек, в которых измеренная высота есть постоянная величина.
Круг равных высот представляет собой малый круг с центром в полюсе освещения и радиуса RКРВ = z = 90 - h.
Уравнение круга равных высот.
Выведем уравнение КРВ. Для этого надо связать измеренный параметр h, текущие координаты i, i и экваториальные координаты светила С. Т.е. необходимо осуществить переход от экваториальной системы координат к горизонтной, решив параллактический треугольник. Уравнение КРВ будет иметь следующий вид
sinh = sin i sin + cos i cos cos(tгр ± i) (4.2)
величины - h, , tгр, входящие в это уравнение, являются постоянными, поэтому они называются параметрами КРВ. Именно они определяют положение и размеры КРВ. Так например, склонение и гринвичский часовой угол задают координаты центра полюса освещения, (смотри формулу (4.1)), а высота h определяет радиус КРВ - RКРВ = 90 - h. Один измеренный параметр определяет одну изолинию, с бесконечным множеством точек с координатами i, i, в которых измеренный параметр есть постоянная величина. Для получения обсервованных координат о, о необходимо произвести измерения двух навигационных параметров (h1 и h2), которые определяют две изолинии, пересечение которых дает обсервованную точку.