

§ 5.3. Электрические системы передачи измерительной информации с унифицированным токовым сигналом
Одной из распространенных систем передачи измерительной информации является электрическая система с унифицированным токовым сигналом. Использование постоянного тока в этой системе повышает ее помехоустойчивость, так как позволяет исключить влияние индуктивности и емкости линий связи на сигнал измерительной информации и увеличивает протяженность канала связи до 5 — 20 км.
Приемниками информации в электрических системах передачи могут быть промежуточные преобразователи, регуляторы, измерительные приборы или средства вычислительной техники.
В качестве источников информации в электрических системах передачи с унифицированным токовым сигналом применяются первичные измерительные преобразователи, оснащенные преобразователями либо «сила — ток», либо «перемещение — ток».
Первичные измерительные преобразователи, оснащенные преобразователями «сила — ток».
В основу работы ПИП, оснащенных преобразователями «сила— ток», положен принцип силовой компенсации. ПИП включает (рис. 5.6) чувствительный элемент II и преобразователь «сила —ток» III.
И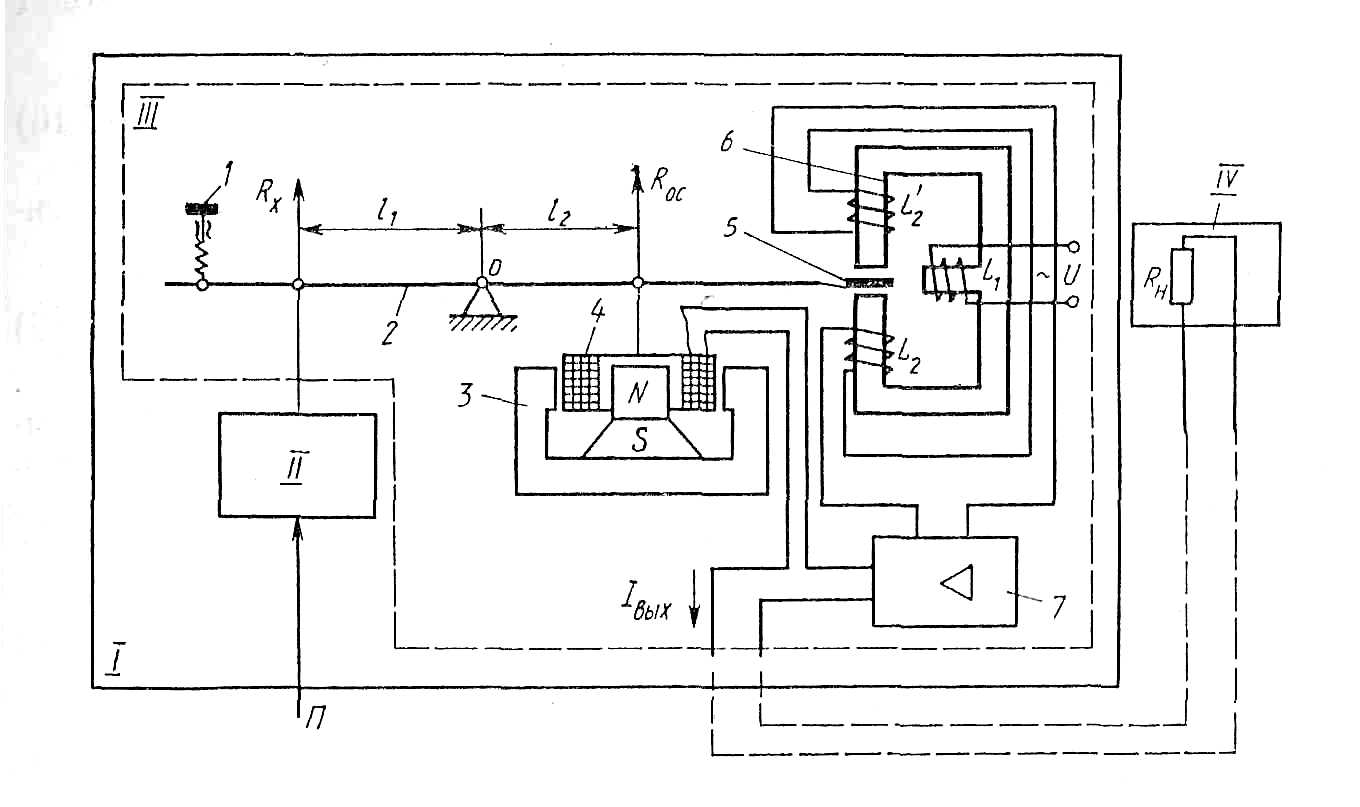 змеряемая
величина П преобразуется чувствительным
элементом II
в усилие Rx.
Это усилие через рычаг 2 уравновешивается
усилием обратной связи Roc,
развиваемым магнитоэлектрическим
преобразовательным элементом.
змеряемая
величина П преобразуется чувствительным
элементом II
в усилие Rx.
Это усилие через рычаг 2 уравновешивается
усилием обратной связи Roc,
развиваемым магнитоэлектрическим
преобразовательным элементом.
Рис. 5.6. Схема электрической системы передачи измерительной информации с преобразователем «сила—ток»
Магнитоэлектрический преобразовательный элемент состоит из стержневого постоянного магнита NS с П-образным магнитопроводом 3, в зазоре между постоянным магнитом NS и магнитопроводом расположена круглая рамка 4, жестко закрепленная на рычаге 2. Обмотка рамки соединена с выходом электронного усилителя 7. Вход электронного усилителя соединен с вторичными обмотками L2 и L2' индикатора перемещения 6 рычага 2. Индикатор перемещения выполнен в виде дифференциально-трансформаторного преобразователя, на первичную обмотку L1 которого подается питание с электронного усилителя.
При изменении значения П равновесие рычажной системы нарушается, что приводит к перемещению рычага и укрепленного на нем сердечника 5 из магнитомягкого материала. Перемещение сердечника преобразуется индикатором перемещения 6 в электрический сигнал Δе, который поступает на вход электронного усилителя 7. Последний усиливает и преобразует Δе в ток IВЫX, подаваемый в линию связи и на вход элемента обратной связи— магнитоэлектрического преобразовательного элемента. При протекании тока IВЫX по катушке 4 магнитоэлектрического преобразовательного элемента формируется сила
Roc = Bln IВЫX , (5.15)
где В — магнитная индукция; l — средняя длина витка катушки; n — число витков катушки.
Перемещение рычага 2 под действием сил Rx и Roc происходит до тех пор, пока не наступит состояние равновесия:
Rxl1 = Rocl2. (5.16)
В состоянии равновесия выходной сигнал преобразователя «сила — ток» связан с силой Rx зависимостью
IВЫX
=
![]() (5.17)
(5.17)
Уравнение (5.17) представляет собой статическую характеристику преобразователя «сила — ток». Принимая во внимание статическую характерстику (5.5) чувствительного элемента, запишем уравнение (5.17) следующим образом:
IВЫX
=
![]() (5.18)
(5.18)
где k0 - коэффициент преобразования чувствительного элемента;
k0
=
![]() - коэффициент преобразования ПИП.
- коэффициент преобразования ПИП.
Уравнение представляет собой статическую характеристику ПИП.
Путем изменения коэффициента kП можно изменять диапазон измерении преобразователя в пределах ± (10—20) %. Как и в пневматических преобразователях, изменение kП достигается изменением отношения l1/l2.
Для преобразователя, настроенного на заданный диапазон измерении, например 0—Пmax, статическая характеристика имеет вид
IВЫX
=
![]() (5.19)
(5.19)
где k -постоянный коэффициент, определяемый диапазоном изменения выходного сигнала и равный 5 для ПИП с диапазоном изменения выходного сигнала 0—5 мА.
Для ПИП с диапазоном измерений Пmin—Пmax, статические характеристики имеют вид
IВЫX
=
![]() (5.20)
(5.20)
если диапазон изменения выходного сигнала 0—5 мА, или
IВЫX
=
![]() (5.21)
(5.21)
если диапазон изменения выходного сигнала 0—20 мА.
В тех случаях, когда возникает необходимость изменения диапазона измерений в больших пределах, применяют ПИП с преобразователем «сила-—ток», представленным на рис. 5.7.
Перемещением ножевой опоры 4 можно изменять диапазон измерений в широких пределах. Назначение остальных элементов преобразователя «сила — ток» аналогично назначению соответствующим элементам преобразователя, представленного на рис. 5.6.
Кроме рассмотренных ПИП с линейной статической характеристикой разработаны преобразователи с квадратичной корневой статической характеристикой. Отличительной чертой преобразователей этого типа является использование электромагнитного преобразовательного элемента в качестве элемента обратной связи. Развиваемое им усилие обратной связи Roc связано с током IВЫX соотношением
Roc = koc I2ВЫX, (5.22)
где koc - коэффициент преобразования электромагнитного преобразовательного элемента.
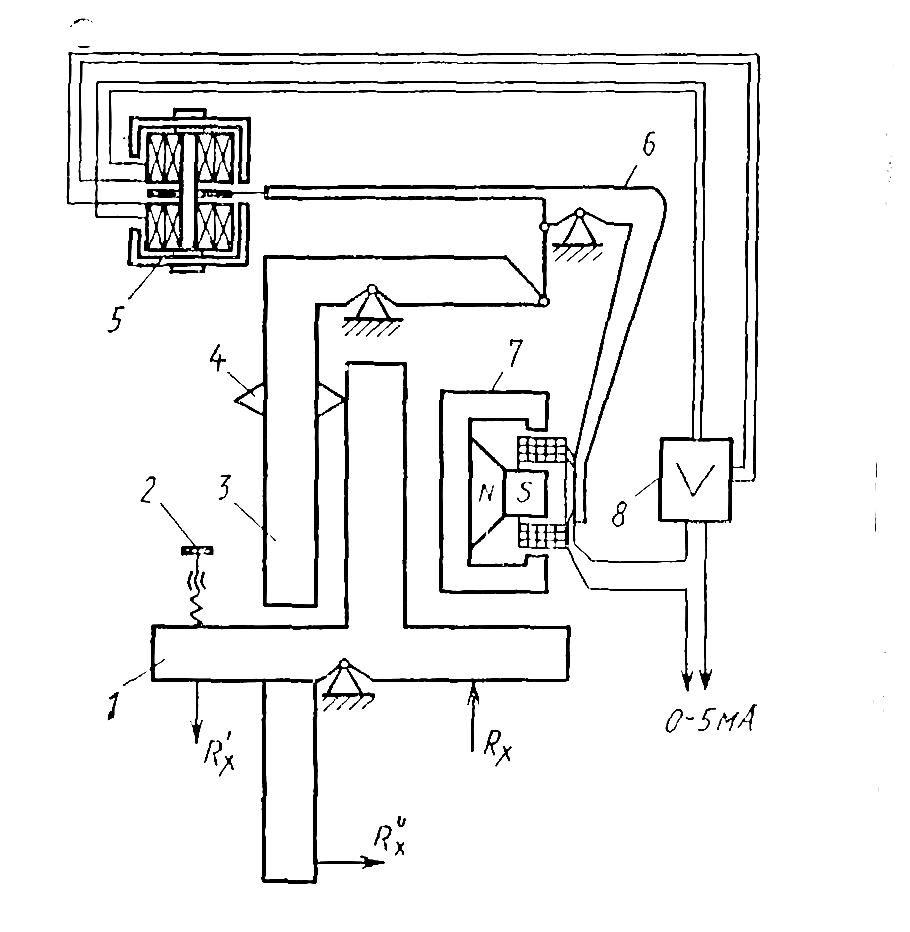
Рис. 5.7. Схема унифицированного преобразователя «сила — ток»
1 — Т-образный рычаг; 2 — пружина корректора нуля; 3 — Г-образный рычаг; 4 — ножевая опора; 5 —индикатор перемещений: 6 — рычаг обратной связи; 7 —элемент обратной связи; 8— электронный усилитель
Преобразователи с квадратичной корневой статической характеристикой находят применение в тех случаях, когда необходима передача измерительной информации о расходе, измеряемом методом переменного перепада давления.
При эксплуатации системы передачи с унифицированным токовым сигналом важным является соответствие суммарного сопротивления внешней нагрузки нормированному значению. Суммарное сопротивление внешней нагрузки не должно превышать 2,5 кОм при токе 5 мА и 1 кОм при токе 20 мА. Дальность передачи информации при токе 0—5 мА равна 5 км, а при токе 0—20 мА—20 км.
Первичные измерительные преобразователи, оснащенные преобразователями «перемещение — ток». Система передачи измерительной информации на базе ПИП с преобразователем «перемещение — ток» представлена на рис. 5.8 [6].
Основными узлами ПИП являются чувствительный элемент II и преобразователь «перемещение — ток» III.
Чувствительный элемент II преобразует измеряемый технологический параметр П в линейное перемещение магнитного сердечника I, изготовленного в виде постоянного магнита цилиндрической формы.
Преобразователь III осуществляет преобразование перемещения постоянного магнита I в электрический сигнал.
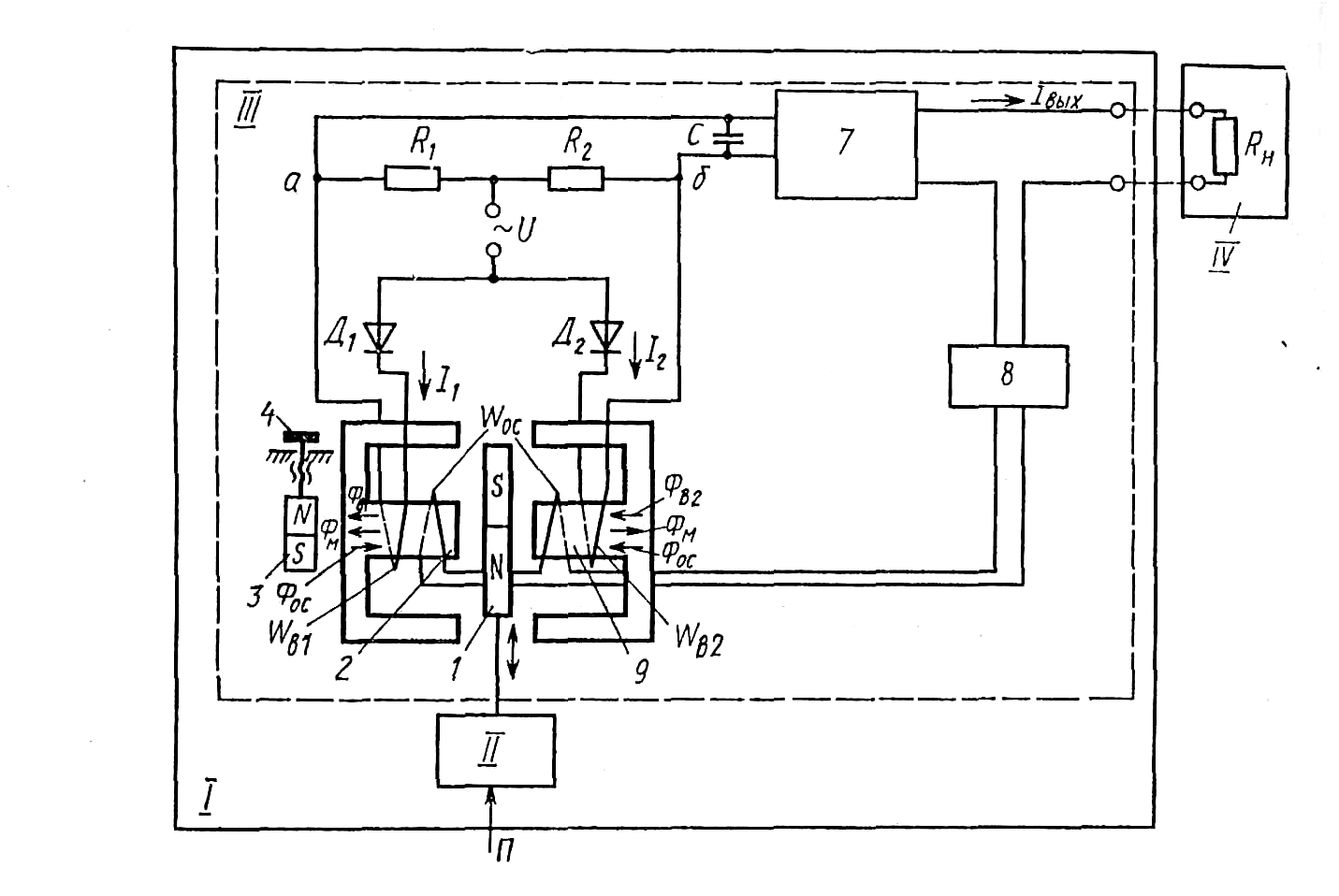
Рис. 5.8. Схема электрической системы передачи измерительной информации с преобразователем «перемещение — ток»
Для преобразования используется магнитная система из внешних магнитопроводов 5 и 6 (рис 5.9) и индикаторов магнитных потоков (магнитопроводов специальной формы) 2 и 9, каждый из которых содержит
Обмотку возбуждения WB и обмотку обратной связи Wос. Обмотки возбуждения с последовательно включенными диодами Д1 и Д2 образуют плечи неравновесного моста. Два других плеча образуют резисторы R1 и R2, шунтированные фильтрующим конденсатором С. Измерительная диагональ аб моста подключена к усилителю 7, выход которого соединяется через канал связи с приемником информации IV и через элемент обратной связи 8 с обмотками обратной связи Woc.
Питание мостовой схемы осуществляется напряжением в виде прямоугольных импульсов частотой 50 Гц.
При нейтральном положении магнитного сердечника I (рис. 5.9, а) ответвляемые магнитные потоки Ф2 и Ф3 в магнитопроводы индикаторов магнитных потоков 2 и 9 равны по величине и противоположны по направлению.
Так как магнитные потоки Ф2 и Ф3 равны, то результирующий магнитный поток Фм равен нулю.
При смещении сердечника от среднего положения (рис. 5.9, б) возникает результирующий магнитный поток Фм, направление которого определяется направлением перемещения сердечника и его полярностью.
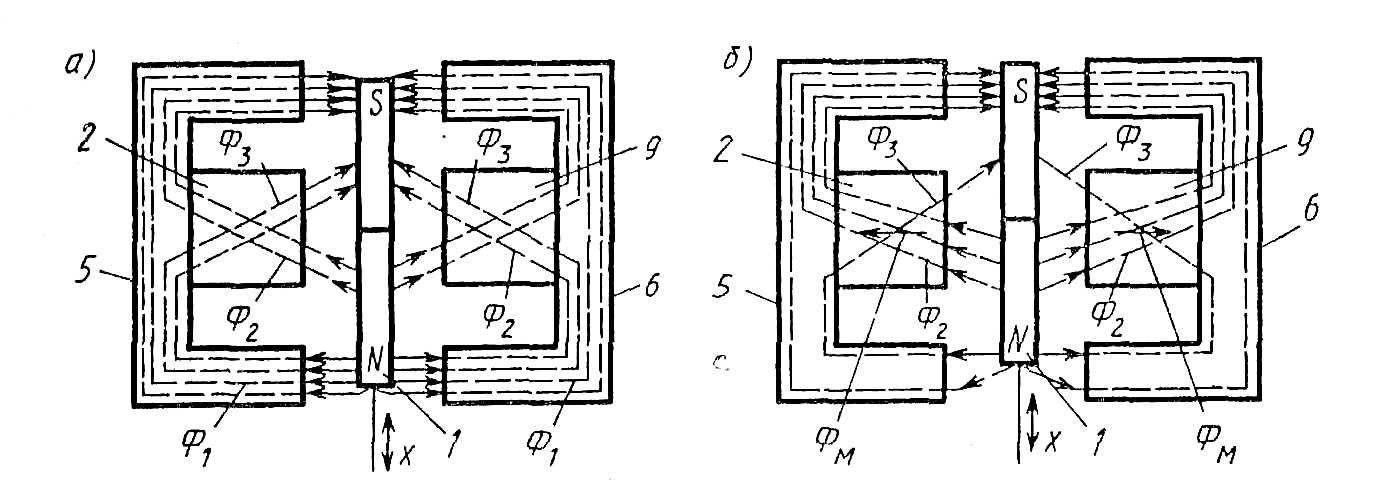
Рис. 5.9. Распределение магнитных потоков в магнитном преобразовательном элементе
Если сердечник I находится в нейтральном положении, то в магнитопроводах индикаторов магнитных потоков 2 и 9 (см. рис. 5.8) присутствуют только магнитные потоки ФВ1 и ФВ2. Эти магнитные потоки обусловливают одновременное насыщение магнитопроводов индикаторов 2 и 9, что отражается на значениях индуктивности и полного сопротивления обмоток W В1 и WB2. В результате в любой момент времени І1 = I2 и мост находится в равновесии. При изменении положения сердечника в магнитопроводах индикаторов 2 к 9 появляются магнитные потоки Фм, которые с магнитными потоками ФВ1 и ФВ2 создают результирующие магнитые потоки:
Ф1* = ФМ+ФВ1 и Ф2* = ФМ-ФВ2 .
Под влиянием магнитного потока Ф1* насыщение магнитопровода индикатора магнитного потока 2 наступает раньше, чем насыщение магнитопровода индикатора магнитного потока 9 потоком Ф2*. Вследствие этого ток І1, протекающий по обмотке WB1, резко возрастает, что сопровождается нарушением равновесия мостовой схемы.
Усилитель формирует на выходе сигнал постоянного тока ІВЫХ, пропорциональный разбалансу мостовой схемы. Сигнал поступает в канал связи и через устройство обратной связи 8 — в обмотку обратной связи Woс. При прохождении тока Іос по обмоткам Wос формируются магнитные потоки Фос, которые направлены навстречу магнитным потокам Фм и обеспечивают их компенсацию.
В результате компенсирующего воздействия магнитного потока Фос на магнитный поток Фм равновесие мостовой схемы восстанавливается и для любого момента времени І1≈І 2.
Статическая характеристика преобразователя определяется видом зависимости Іос = f( ІВЫХ). Для преобразователей с линейной характеристикой устройство обратной связи представляет собой активное сопротивление, а для преобразователей с квадратичной корневой характеристикой устройство обратной связи выполнено в виде квадраторов. Настройка ПИП на заданный диапазон измерений осуществляется изменением параметров устройства обратной связи, а настройка нулевого сигнала — c помощью винта 4, перемещающего шунт 3. Суммарное сопротивление внешней нагрузки RBH не должно превышать 2,5 кОм. Классы точности преобразователей с унифицированным токовым сигналом: 0,6; 1,0; 1,5.