

Глава 5
СИСТЕМЫ ПЕРЕДАЧИ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ
§ 5.1. Общие сведения
Системы передачи измерительной информации предназначены для сбора информации с удаленных от наблюдателя объектов. В телемеханике подобные измерительные системы называют телеизмерительными (от греч. tele — далеко).
Для контроля и управления технологическими процессами широко используются телеизмерительные системы ближнего действия, называемые системами дистанционной передачи. С помощью этих систем измерительная информация может передаваться на расстояние от нескольких десятков метров до 10—20 км.
Информация по каналам связи в измерительных системах передается в форме сигналов (см. табл. 1.1).
Формирование сигналов осуществляется путем нанесения информации на материальные носители, которыми служат периодические процессы или физические величины, например электрический ток, давление газа, электромагнитные колебания, звуковые волны.
Нанесение информации на носители осуществляется путем изменения одного или нескольких параметров носителя в соответствии с передаваемой информацией. Процесс нанесения информации на носитель называют модуляцией.
В настоящее время известно более десяти видов модуляций, из которых в системах передачи информации, применяемых на предприятиях, использующих химико-технологические процессы, получили распространение прямая модуляция физических величин (рис. 5.1, а) и частотная модуляция гармонических колебаний (рис. 5.1, б).
По виду энергии носителя информации системы передачи информации подразделяют на электрические, пневматические и гидравлические. Информация в указанных системах передается в виде «естественных» или унифицированных сигналов. Основные виды и параметры унифицированных сигналов приведены в табл. 2.3.
В ГСП приняты следующие системы передачи: пневматическая, электрическая токовая и электрическая частотная. Кроме перечисленных систем передачи информации в практике измерений применяются: реостатная, индуктивная, дифференциально-трансформаторная, ферродинамическая, сельсинная и др.
Указанные системы передачи информации получили название в соответствии с типом элемента, осуществляющего преобразование «естественного» сигнала (перемещения) в электрический сигнал.
В § 2.9 было акцентировано внимание на эффективности блочно-модульного принципа построения средств измерений. Указанный принцип широко применяется при создании первичных измерительных преобразователей (ПИП) систем передачи информации ГСП.
Р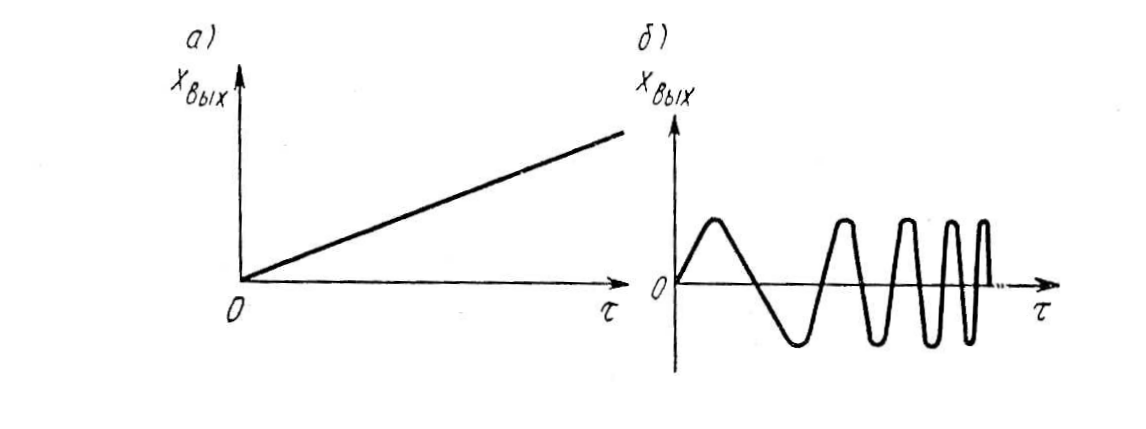 ис.
5.1. Виды модуляций
ис.
5.1. Виды модуляций
В озможность
построения ПИП блочно-модульного
типа
объясняется тем, что большое число
технологических параметров, таких, как
давление, перепад давления (расход),
плотность, вязкость, температура,
уровень, скорость вращения и другие,
легко и с достаточной для практики
точностью преобразуются в усилие или
линейное (угловое) перемещение. В ПИП
блочно-модульного типа преобразование
технологического параметра в
унифицированный сигнал осуществляется
по схемам: а) технологический параметр
усилие унифицированный сигнал;
б) технологический параметр
перемещение унифицированный сигнал.
Для преобразования технологического
параметра в усилие или линейное (угловое)
перемещение разработаны методы и
средства измерений, подробно
рассмотренные в соответствующих главах.
Преобразование усилия в унифицированный
пневматический или электрический
сигналы осуществляется преобразователями,
работа которых основана на принципе
компенсации сил. Широкое распространение
получили преобразователи, с помощью
которых сила преобразуется в пневматический
сигнал — преобразователи «сила —
давление», а также преобразователи
«сила — ток», посредством которых сила
преобразуется в унифицированный сигнал
постоянного тока (токовый сигнал).
Указанные преобразователи иногда
соответственно называют «пневмосиловые»
и «электросиловые».
озможность
построения ПИП блочно-модульного
типа
объясняется тем, что большое число
технологических параметров, таких, как
давление, перепад давления (расход),
плотность, вязкость, температура,
уровень, скорость вращения и другие,
легко и с достаточной для практики
точностью преобразуются в усилие или
линейное (угловое) перемещение. В ПИП
блочно-модульного типа преобразование
технологического параметра в
унифицированный сигнал осуществляется
по схемам: а) технологический параметр
усилие унифицированный сигнал;
б) технологический параметр
перемещение унифицированный сигнал.
Для преобразования технологического
параметра в усилие или линейное (угловое)
перемещение разработаны методы и
средства измерений, подробно
рассмотренные в соответствующих главах.
Преобразование усилия в унифицированный
пневматический или электрический
сигналы осуществляется преобразователями,
работа которых основана на принципе
компенсации сил. Широкое распространение
получили преобразователи, с помощью
которых сила преобразуется в пневматический
сигнал — преобразователи «сила —
давление», а также преобразователи
«сила — ток», посредством которых сила
преобразуется в унифицированный сигнал
постоянного тока (токовый сигнал).
Указанные преобразователи иногда
соответственно называют «пневмосиловые»
и «электросиловые».
Преобразование перемещения в унифицированный электрический сигнал постоянного тока осуществляется преобразователями «перемещение — ток», называемыми магнитомодуляционнымн (преобразователи с компенсацией магнитных потоков).
Преобразователи «сила — давление», «сила-—ток» и «перемещение -— ток» представляют собой модули, использование которых обеспечивает взаимозаменяемость ПИП в целом и отдельных его узлов. Конструктивно ПИП в ГСП оформляется в виде блока, включающего чувствительный элемент, к которому непосредственно подводится измеряемый технологический параметр П, и один из названных преобразователей.