

Министерство высшего и среднего профессионального образования Российской Федерации
Санкт-Петербургский Государственный Технологический
Университет Растительных Полимеров
Кафедра автоматизированного электропривода
и электротехники
Курсовая работа на тему: «Управление шаговым двигателем».
Выполнил:
студентка 533 гр.
Ночёвкина Я.А.
Проверил:
Васильев В.Ф.
Санкт-Петербург
2014г.
Содержание
Введение ……………………………………………………………………………….3 1. Шаговый двигатель - устройство, преимущества и недостатки……………...3-8 2. Управления шаговым двигателем………………………………………………... 8 2.1. Общие сведение об управлении шаговым двигателем……………….……...8-9 2.2.Управление шаговым двигателем с помощью ПК……………………………9-12 3. Реализация алгоритмов и интерфейс управления шаговым электродвигателем………………………………………………………...………12-13 Выводы………………………………………………………………………………. 13 Литература ……………………………………………………………………………14
1.Введение
Шаговый электродвигатель (ШД) обычно состоит из многополюсного статора с соответствующим числом фазных обмоток и зубчатого ротора из магнитного материала. Для управления поворотом ротора в фазные обмотки подают импульсы тока в нужном порядке, при этом зубцы ротора стремятся притянуться к соответствующим полюсам статора и ротор поворачивается на фиксированный угол. Таким образом, направление и угол поворота ротора ШД однозначно определяется серией фазных импульсов. За один оборот ротор совершает целое число шагов. Ротор ШД может удерживаться в фиксированном положении, пока через фазную обмотку протекает постоянный ток. Применение ШД обеспечивает относительную простоту реализации систем позиционирования, а импульсный характер управления удобно согласуется с цифровыми управляющими устройствами. Основные характеристики ШД:
Число фаз; Угол поворота град./шаг (или число шагов на 1 оборот); Крутящий момент (момент удерживания); Максимальная частота фазных импульсов.
2.Шыговый двигатель-устройство, преимущество и недостатки.
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора. Преобразует электрические импульсы в дискретные механические перемещения. Шаговый двигатель практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов (рис. 1).

Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми. Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать бо́льший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8 — 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи Чем же хорош шаговый двигатель?
• угол поворота ротора определяется числом импульсов, которые поданы на двигатель • двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны) • прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу • возможность быстрого старта/остановки/реверсирования • высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников • однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи • возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора • может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов Но не все так хорошо...
• шаговым двигателем присуще явление резонанса • возможна потеря контроля положения ввиду работы без обратной связи • потребление энергии не уменьшается даже без нагрузки • затруднена работа на высоких скоростях • невысокая удельная мощность • относительно сложная схема управления
Шаговые
двигатели относятся к классу
бесколлекторных двигателей постоянного
тока. Как и любые бесколлекторные
двигатели, они имеют высокую надежность
и большой срок службы, что позволяет
использовать их в критичных, например,
индустриальных применениях. По сравнению
с обычными двигателями постоянного
тока, шаговые двигатели требуют
значительно более сложных схем
управления, которые должны выполнять
все коммутации обмоток при работе
двигателя.
Одним из
главных преимуществ шаговых
двигателей является возможность осуществлять
точное позиционирование и регулировку
скорости без датчика обратной
связи. Однако это подходит только
для систем, которые работают
при малом ускорении и с относительно
постоянной нагрузкой. В то же
время системы с обратной связью
способны работать с большими
ускорениями и даже при переменном
характере нагрузки.
В отличие от
коллекторных двигателей, у которых
момент растет с увеличением скорости,
шаговый двигатель имеет больший момент
на низких скоростях. К тому же, шаговые
двигатели имеют гораздо меньшую
максимальную скорость по сравнению с
коллекторными двигателями, что
ограничивает максимальное передаточное
число и, соответственно, увеличение
момента с помощью  редуктора.
редуктора.
Существуют три основных типа шаговых двигателей: • двигатели с переменным магнитным сопротивлением • двигатели с постоянными магнитами • гибридные двигатели
Определить тип двигателя можно по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков.
Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Различают ШД с активным (возбужденным) и реактивном ротором. Шаговые двигатели с активным ротором имеют обмотку возбуждения или выполнены с постоянными магнитами не имеют обмотки возбуждения, а их ротор выполняют из мягкого материала. Обмотку управления ШД обычно располагают на статоре и делают одно- или многофазной (чаще трех- или четырехфазной).
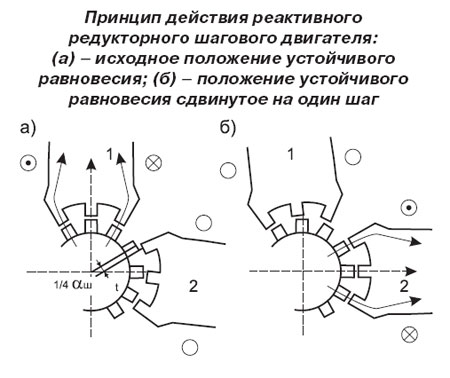
Рассмотрим принцип действия шагового двигателя на примере реактивного трехфазною ШД, статор которого имеет шесть явно выраженных полюсов ( по два полюса на фазу), а ротор- два полюса (рис. 2)
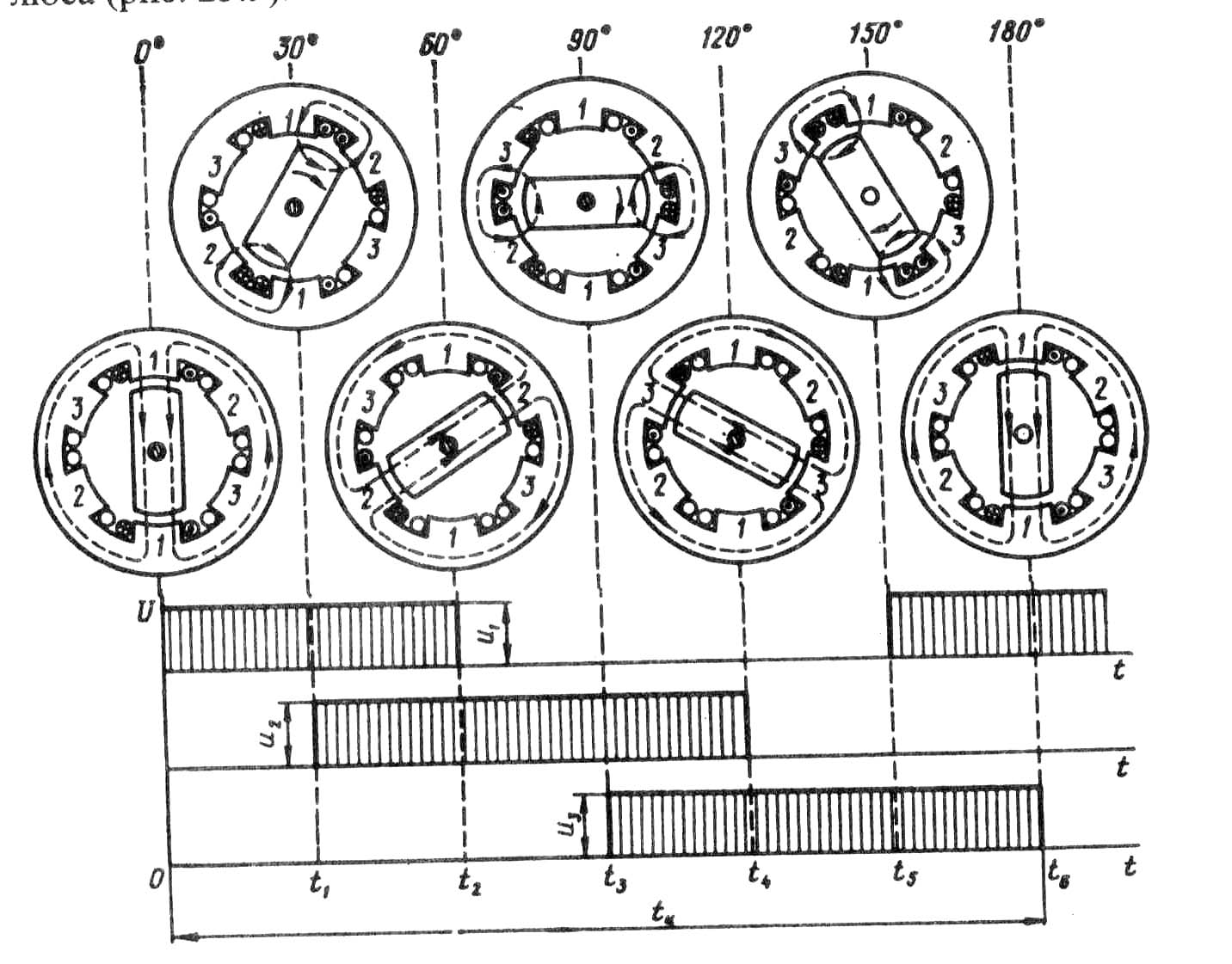
Рис.2 Принцип действия реактивного ШД
При прохождении импульса тока в фазе 1 обмотки управления ротор занимает положение, соответствующее действию электромагнитных сил, т.е. по оси полюсов 1-1. В момент времени t1 появится импульс тока в фазе 2. При этом на ротор будут действовать силы, обусловленные одновременным воздействием двух МДС ( полюсов 1-1 и 2-2). В результате ротор повернется по часовой стрелке и займет положение, промежуточное между полюсами 1-1 и 2-2, т.е. повернется на шаг α=30. В момент t2 импульс тока в фазе 1 прекратится и ротор, сделав шаг α=30,займет положение по оси полюсов 2-2. В момент t3 появится импульс тока в фазе 3 и ротор, повернувшись еще на 30, займет положение между полюсами статора 2-2и 3-3. В момент времени t4,t5 и t6 ротор также будет совершать шаги по 30и в конце цикла (момент t6) займет положение по оси полюсов статора 1-1, совершив за о цикл поворот на 180.
В последующие циклы процессы в ШД будут повторяться. Таким образом, рассматриваемый реактивный трехфазный ШДработает по шеститактной схеме коммутации с раздельно-совместным включением фазны обмоток управления: 1-12-2-23-3-31-…
Работают реактивные ШД от однополярных импульсов напряжение, так какзмениение полярности этих импульсов не зменяет направление рактивного момента. Для изменения направления ращающения ротора рассматривоемого ШД необходимо изменить схему коммутации обмоток, например 1-13-3-32-2-21-…
Если в этом двигатле применить раздельное включение обмоток, т.е. принять схему коммутации 1-2-3-…, то шаг двигателя α=60
 Шаг
двигателя(град)
Шаг
двигателя(град)
= 360/(2p m k),
Где 2p –число полюсных выступов роторе; m – число фазных обмоток управления, пространственно смещенных относительно друг друга; k – коэффициент определяемый способом включения фазных обмоток управления ( при раздельном включении k=1, при раздельно-совместном – k=2).
Уменьшение шага α способствует повышению устойчивости и точности работы ШД. Для уменьшения шага,увеличивают число полюсных выступов на роторе 2p.
Так, если в расматриваемом двигателе применить ротор рестообразного сечения ( 2p =4)то при шеститактной коммутации шаг α=15.
ШШаговые двигатели с активным ротором( с обмоткой возбуждения или постоянным магнитом на роторе) позволяют получить большие значения вращающего мемента, а также обеспечивают фиксацию ротора при отсутствии управляющего сигнала.
Один из важных параметров ШД – частота приемистости- максимальная частота следования управляющих мпульсов, при кторой ротор втягивается в синхроним с места без потори шага. У шаговых двигателей реактивного типа частота приемистости при номинальной нагрузке достигает 1000-1300 Гц. С увеличением шага частота приемистости уменьшается. Шаговый двигатель работает в комплекте с коммутатором-устройством, преобразующим заданную последовательность управляющих импульсов в m-фазную систему прямоугольных импульсов напряжения.
При расмотрения принципа работы шагового двигателя влияние нагрузочного момента на валу двигателя не учитывалось. Если же на вал шагового двигателя действуе нагрузочный момент М , то при переключении управляющего импульса с одной фазы на другую МДС статора повернется на угол α , а ротор двигателя, поворачиваясь за вектором МДС, будет отставать от него на угол , называемый углом статической ошибки шагового двигателя, эл.град:
= arcsin( М / М ),
Где М - максимальный татический момент, соответствующий углу смещениея ротора отностельного вектора МДС статора =90 эл.град.
Быстродействие шаговых двигателейопределяется скоростью протекания электромагнитных процессов при переклении управляющихимпульсовпряжения с одной фазы статора на другую. Скорость протеканияэтих процессов оценвания электромагнитной постоянной времени, с
Т = L / r ,
Где L - индуктивность обмотки одной фазы статора, Гн; r - активное сопротивление обмотки одной фазы статора,Ом.
Для повышения быстродействия шагового двигателя в обмотки фаз статора последовательного включают резисторы R , тогда
T = L /(r +R ).
Энергетическим показателм шагового двигателя вся значение потребляемой мощности Р . Частота вращения шагового двигателя регулируется зменением частоты подачи управляющих импульсов напряжения на фазы обмотки статора.