

1 Какие задачи решает бортовая информационно-управляющая система?
Бортовая информационно-управляющая система (БИУС) решает:
- Управление и стабилизация положения центра масс ВС на заданной траектории в продольной и боковой плоскостях движения
- Управление и стабилиация определённого углового положения ВС относительно направлений меридиана, истинной геоцентрической вертикалиместа нахождения летательного аппарата, а также – вектора скорости V набегающего потока воздуха.
2 Перечислите основные пункты алгоритма утранения отклонений вс отзаданного режима полёта.
- Восприятие датчиками первичной информации о состоянии ВС и его двигателей
- Измерение возникающих отклонений от заданных значений параметров режима полёта ВС и режима работы авиадвигателей
- Преобразование полученной информации, отображение её на индикаторах, размещённых на приборных досках членов экипажа
- Определение в соответствии с полученными отклонениями параметров режима полёта, необходимых по направлению и величине перемещений органов управления
- Приложение усилий, потребных для перестановки в новое положение соответствующих исполнительных механизмов и агрегатов управления
- Обеспечение динамического качества процесса возвращения объекта к требуему исходному режиму состояния
- Контроль критических параметров полёта ВС и работы авиадвигателей, сигнализация и предупреждение выхода объектов управления на критические режимы.
3 Каков состав стандартного комплекса навигационного и пилотажного оборудования самолёта?
8 групп средств приборного оборудования, позволяющих решать навигационные и пилотажные задачи
- Аэрометрическая система приёмников полного и статического давлений, предназначенная для определения высоты полёта, воздушной скорости, вертикальной скорости, температуры наружного воздуха.
- Система авиагоризонтов, воспринимающая угловые отклонения ВС относительно центра масс в продольной и боковой плоскостях движения, отделяет углы крена и тангажа
- Курсовые системы и приборы, определяют значение углов истинного и магнитного курса
- Навигационные системы, служащие для определения координат места положения центра масс ВС - широты, долготы
- Система автоматич управления и стабилизации угловых координат, а также линейных параметров движения центра масс ВС: высота, воздушная скорость, число маха
- Средство предупреждения критичских режимов полёта по таким параметрам, как угол атаки, нормальная перегрузка, минимальная и максимальная допустимые скорости движения ВС
- Средства восприятия, измерения и контроля параметров работы авиадвигателей, а также обеспечивающих эту работу топливной и масляной систем
- Бортовые устройства и системы регистрации параметров ВС, авиадвигателей и функциональных систем, предназначенные для проведения послеполётного контроля.
4
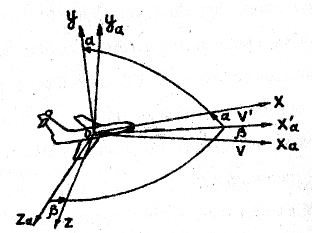
Покажите на рисунках направления осей
земной, связанной и скоростной систем
координат.
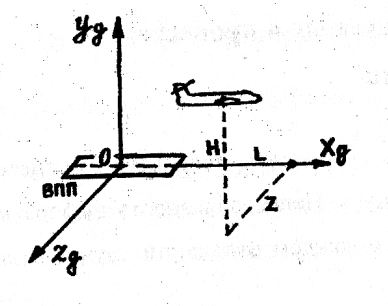 Земная
система
Земная
система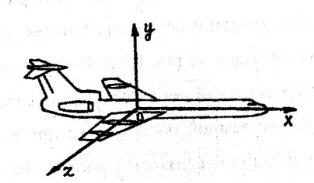 Связанная
Связанная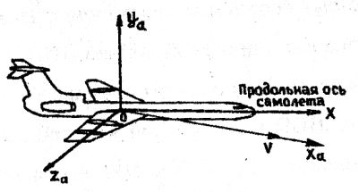 Скоростна
Скоростна
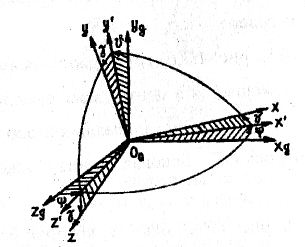
5 Представьте на рисунках 3 последовательных поворота на углы Эйлера
6 Представьте картину совмещения скоростной и связанной систем координат, определите составляющ векторов скорости ВС
7 Дайте кратк хар-ку ПНК
ПНК подвергается внешним воздействиям:
- Изменение температуры и давления окружающ среды
- Вибрации, линейные и угловые ускорения
- Механич удары
- Запыленность, алвжность атмосферы
8 Выражение, характер перегрузки, возникающ при маневрировании ВС
Величина
перегрузки:
![]()
![]() Вибрационная
перегрузка, f-частота
вибрации, a
– амплитуда вибрации
Вибрационная
перегрузка, f-частота
вибрации, a
– амплитуда вибрации
9 Каковы современные тенденции развития и совершенствования бортовых ПНК?
Использование новых конструктивных, технологических, структурных и алгоритмических методов.
Ширрокое внедрение в практику современных лазерных, пьезокерамических, пьезоэлектрических измерителей, радиоэлектронных изделий и цифровой вычислительной техники в ПНК.
10 В чём закл принцип действия преобразователей давления?
Механические
Зависимость величины деформации упругого чувствительного элемента от измеряемого давления жидкой или газообразной среды.
11. В чём заключается принцип действия термоэлектрических преобразователей?
Электромеханические
Деформация ЧЭ преобразуется не в перемещение стрелки укзателя а в изменение электрической величины.
12 Что такое трубка Пито? В каких устройствах исп?
Трубка Пито — прибор для измерения динамического напора текущей жидкости (суспензии) или газа.
Исп в гидравлических утройствах, ППД.
13 Объясните схему термоэлектрического термометра
14 В чём закл принцип действия осевого пружинного акселерометра?
 Инерциальный
метод, основан на измерении силы
иннерции, действующей на иннерционную
массу при её движении с ускорением.
Инерциальный
метод, основан на измерении силы
иннерции, действующей на иннерционную
массу при её движении с ускорением.
15 В чём заключается свойство трёхстепенного гироскопа?
Способность сохранять неизменным направление оси вращения ротора в мировом пространстве, невосприимчивость к толчкам и ударам, способность совершать прецессионное движение под воздействием моментов внешних сил.
16 Принцип действия электрического указателя поворота
Ось вращения ротора гироскопа параллельна поперечной оси самолёта, ось вращения рамы параллельна продольной оси самолёта, рама гироскопа удерживается в среднем положении с помощью пары пружин, поворот рамы передаётся с помощью механизма стрелке указателя.
17 Что такое указатель скольжения, принцип действия и задачи
Индикатором угла скольжения служит указатель скольжения, работающий по принципу маятника, чувствительный элемент – шарик, перемещающийся внутри изогнутой стеклянной трубки, заполненной прозрачной жидкостью – толуолом.Шарик в центре – координированный вираж.
18 Принцип действия датчика угловых скоростей на основе двухстепенного гироскопа
При повороте датчика с угловой скоростью вокруг оси чувствительности, которая перепендикулярна главной оси гироскопа и оси прецессии возникает поворот кожуха на некоторый угол, зависящий от угловой скорости, этот поворот преобр в электрич сигнал. В некоторых исп бесконтактные индукционные преобразователи.
19 Принцип действия датчика угловых скоростей на основе лазерного гироскопа
При создании условий для возбуждения активной среды возникают когерентные световые волны, длины определяются условиями генерации, если кольцевой лазер в пространстве поворачивается с некоторой угловой скоростью, оптические пути встречных волн будут неодинаковы, в результате интерференции волн с помощью зеркал возникает совокупность тёмных и светлых полос. Вращение резонатора приводит к перемещению интерференционных полос, на выходе фотодетектора возникает синусоидальный сигнал, который преобр в последовательность электрических импульсов, поступающих на вход счётчика. Количество импульсов пропорционально углу поворота лазера.