

Структурная схема.
Структурная схема контроллера приведена ниже на рисунке 1.7 Зеленым цветом обозначены модули, находящиеся в разработке.
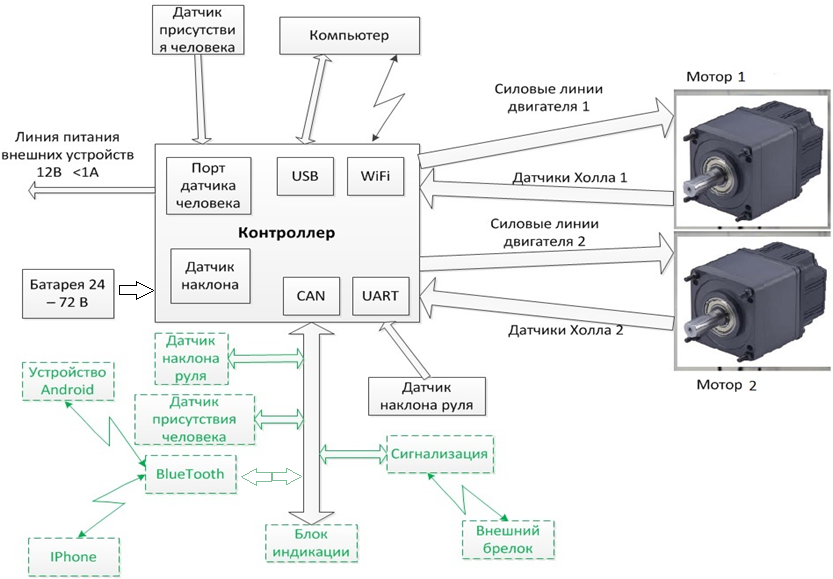
Рисунок 1.7-Структурная схема.
Электрические характеристики контроллера:
1. Питание 24 - 72В
2. Ток потребления (без нагрузки) <200mA
3. Линия питания внешних модулей: 12В, <1A
4. Температурный диапазон -20... +50
О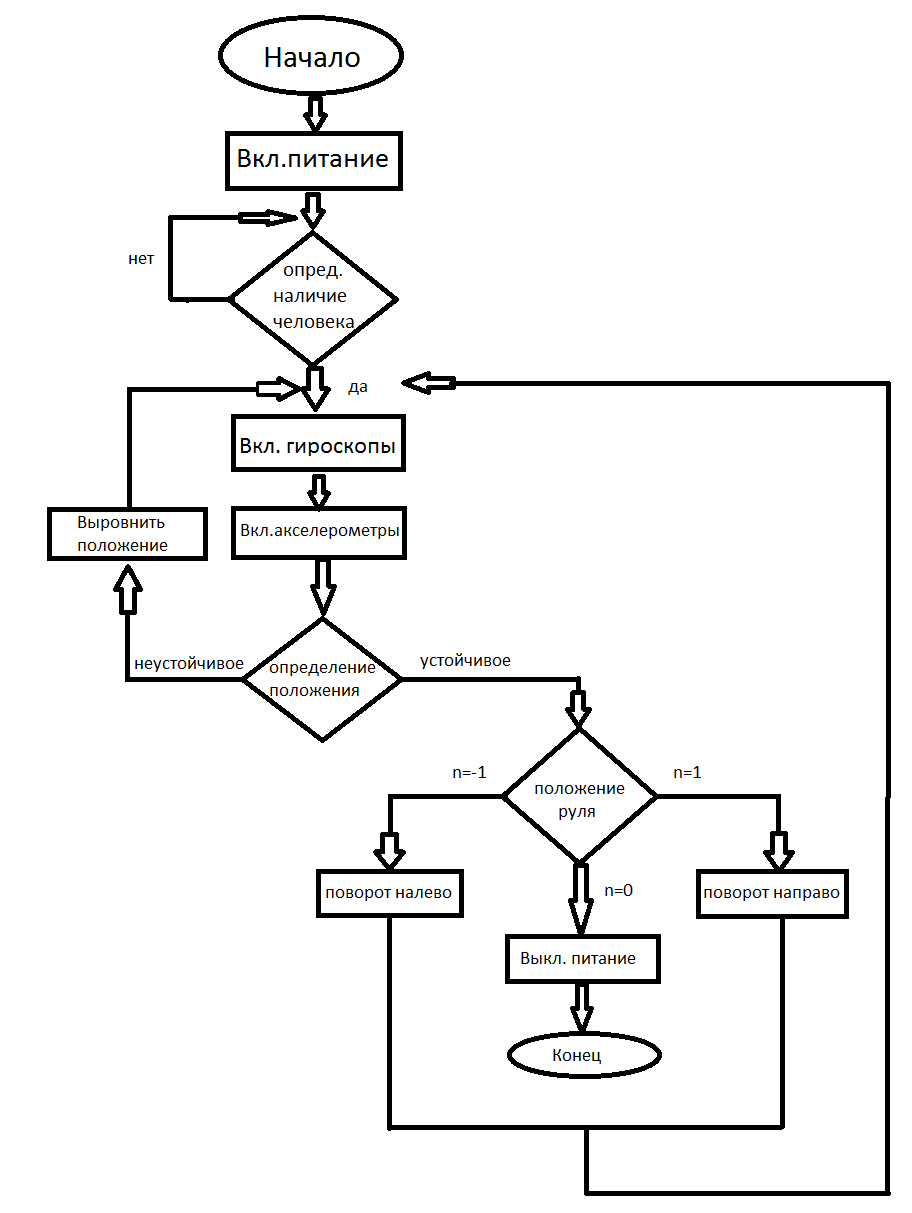 бщий
алгоритм работы скутера.
бщий
алгоритм работы скутера.
Рисунок 1.8 .Алгоритм работы скутера.
Выбор оборудования.
Двигатели.
F=m*g=110*9,8= 1078 H;
M(момент)= F*L= 1078*1.07= 1078H*м= 10,78кг*см;
w=V/r= 0,3/0,713=0,42 рад/с; n=4,01 об/мин;
P=M*w= 1078*0,42=113 Вт;
Выбираем Мотор-редуктор серии IG-90WGM состоит из реверсивного бесколлекторного двигателя постоянного тока и планетарного редуктора.
Характеристики электродвигателя представлены на таблице 1.5 и рисунке 1.9
Таблица 1.5- Характеристики электродвигателя
Напряжение питания, В |
24 |
Номинальная скорость, об/мин |
2500 |
Диапазон регулирования скорости, об/мин |
300 - 3000 |
Максимальная скорость, об/мин |
3000 |
Номинальный крутящий момент кг*см |
4 |
Максимальный крутящий момент, кг*см |
5 |
Крутящий момент на максимальной скорости кг*см |
2 |
Выходная мощность Вт |
103 |
Номинальный ток А |
6 |
Ток холостого хода А |
0,6 |
Температурный диапазон эксплуатации |
0...+50°C |
Режим работы |
продолжительный |
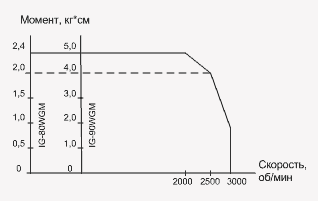
Рисунок 1.9.Характеристика бесколлекторного двигателя.
Таблица 1.6-Характеристика редуктора
Передаточное число |
4 |
Крутящий момент, кг•см |
11 |
Максимальная скорость, об/мин |
700 |
Выбор гироскопов и акселерометров
Сравнение характеристик микромеханических гироскопов. Существует несколько обособленных видов/классов приборов. Если не вдаваться в подробности, грубо можно сказать следующим образом. Чувствительным элементом (ЧЭ) микромеханического гироскопа является инерционная масса, закрепленная внутри корпуса на пружинах (упругих консолях полупроводника и пр.). Эта чувствительная масса приводится в колебательное движение по одной из осей датчика. Эта ось является осью возбуждения (входной осью). По этой оси задается рабочий режим. Измерения же производятся по перпендикулярной к ней оси (выходной). Принцип действия заключается в том, что при вращении корпуса вокруг его измерительной оси чувствительный элемент помимо колебаний вдоль входной оси начинает колебаться еще и вдоль третьей, выходной.ЧЭ начинает описывать в пространстве окружность (или эллипс). Так упрощенно работает одноосевой датчик. У двух и трехосевых датчиков комплекс из ЧЭ и измерительной системы как бы обрамляется еще одной системой подвеса/измерителей. Т.е. одна сборка ЧЭ/Подвес/Измерители (пусть это будет сборка для оси Х) сама является колеблющимся ЧЭ для другой сборки (напр., по ОY), которая входит в сборку для измерения по OZ. Возможна, наверняка, и раздельная система. В теории колеблющийся ЧЭ не должен чувствовать ускорений и не должно у него быть перекрестных связей (в случае двух- или трехосевых датиков) с другими осями чувствительности (ОЧ). Но вследствие неидеальностей создания трехмерной структуры внутри интегральной микросхемы центры масс ЧЭ смещаются, появляются остаточные напряжения в материале, пружины имеют неодинаковые упругости и т.д. В результате ЧЭ для ОХ начинает реагировать на воздействия по OY, линейные ускорения начинают искажать показания гироскопа. Т.е. в измерениях появляется приращение угловой скорости которого на самом деле нет (случайный дрейф). Сделать производство ЧЭ идеальным невозможно (или не целесообразно), поэтому в конструкции датчиков появляются дополнительные элементы, нужные для уменьшения чувствительности к упомянутым паразитным воздействиям. В первую очередь простотой и даже самим наличием элементов реакции паразитных воздействий как раз и отличаются дешевые датчики от датчиков среднего и верхнего ценовых диапазонов. Скутер должен перемещаться, причем иметь достойные динамические характеристики. Про реакцию на вибрации, которые имеют высокую интенсивность в скутерах особо рассказывать не нужно. Все знают что это такое. Поэтому считаю, что вопрос чувствительности гироскопов к ускорению и вибрациям очень важен для создания подвижного объекта с нормальной динамикой.
Погрешности микромеханических гироскопов
Первое, что бросается в глаза разработчикам в даташитах к датчикам, это так называемая «стабильность нуля». Ведь кажется, что именно этот параметр в конечном итоге определяет чувствительность датчика, т.е. минимальное входное воздействие, которое датчик почувствует. Модели ММГ имеющие стабильность нуля немногим более 2 °/час (Земля, как известно вращается со скоростью 15 °/час). Но на практике это не означает, что измерить вращение Земли все-таки удастся. Как бы то ни было, разработчик смотрит на стабильность нуля. Это понятный параметр, показывающий в каких пределах будет колебаться нуль шкалы датчика в лабораторных условиях. В реальности заявленной стабильности не будет. Стабильность обусловленная внутренними источниками погрешностей. В каких условиях датчик будет работать производитель не сможет предугадать, как и вызванные этими условиями девиации. Есть два подхода борьбы с погрешностями: аппаратный и алгоритмический (читай программный). Второй подход подразумевает добавление в прошивку БЦЭВМ специальных программных модулей для коррекции ошибок, вызванных паразитными процессами. И этот подход не рекомендуется как оптимальный. В первую очередь сам датчик должен гасить шумы. Центральный мозг должен заниматься не вычищением основного мусора, а финишной обработкой и обсчетом высокоуровневых алгоритмов (навигация, стабилизация, автоматизация). Есть разного рода методические погрешности. Они легко описываются некими формулами, вот их легко компенсировать программно. Правильнее выбрать датчики, оптимальные с точки зрения соотношения цены к точностным характеристикам. И тут главными параметрами выбора будет скорее всего чувствительности гироскопа к линейному ускорению (g-чувствительность) и вибрациям (g²-чувствительность).
Температурный гистерезис нуля
ММГ имеют погрешности нуля, которые варьируются в зависимости от температуры внутри корпуса. Для проведения термокомпенсации в ММГ встроены температурные датчики. Их точность особого значения не имеет, важна лишь повторяемость показаний. Но с термокомпенсацией есть проблема — гистерезис. Гистерезис в данном случае — это разница между требуемым значением коррекции для конкретной температуры в двух случаях — когда прибор достигает этой температуры охлаждаясь и в случае, когда он нагревается до той же температуры.
На рисунке 1.10 показан температурный гистерезис нуля для ММГ ADXRS453 при изменении температуры от +25°С к +130°С, потом к -45°С и обратно к +25°С. Этот гистерезис имеет место не зависимо от того включен датчик во время колебания температуры или нет. К тому же гистерезис зависит от того, насколько широк диапазон изменения температур.
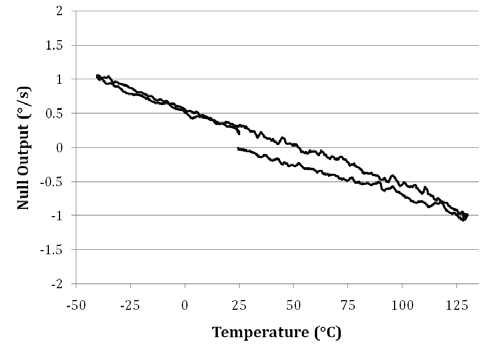
Рисунок 1.10- Температурный гистерезис нуля для ММГ ADXRS453
В общем случае ММГ не должны использоваться для определения углов ориентации при отсутствии некоторой внешней референсной системы, которая позволяет сбросить накопившуюся погрешность до некоторого низкого уровня. По той же системе можно определить и текущее смещение нуля. Таким образом, температурные смещение нуля и погрешность масштабного коэффициента при нормальном применении достаточно эффективно могут компенсироваться (пусть и с точностью до некоторой малой, ненулевой величины).
Погрешности из-за вибраций
Как было написано выше, сферический ММГ в вакууме измеряет лишь вращение и ничего другого. Однако из-за несимметричности ЧЭ и неидеальности изготовления все ММГ чувствуют ускорения. Под чувствительностью к ускорениям чаще всего понимают чувствительность к линейному ускорению (g-чувствительность) и к линейным вибрациям (g²-чувствительность). На объекты, движущиеся в поле тяготения Земли, в любом случае действует ускорение (кроме случаев свободного падения). Чувствительность к линейным ускорениям часто оказывается главным источником погрешностей. ММГ в самом низком ценовом диапазоне оптимизированы прежде всего по стоимости, но не по сопротивлению вибрациям. Они имеют относительно простую механическую систему. Она хоть и отличается живучестью (выдерживает гигантские перегрузки в 10'000 g), но не защищена от вибраций. Малая масса чувствительного элемента -> широкая полоса пропускания. В таких гироскопах чувствительность к ускорению (acceleration effect в даташитах) может быть равна 1000 °/час/g (или 0.3 °/сек/g). И это значение вполне себе нормальное для такого класса датчиков. Но это на порядок выше, чем следует ожидать от точных датчиков. От дешевых датчиков не стоит ожидать стабильности нуля в контексте чувствительности к ускорениям. Даже малые вращения в поле тяготения Земли приводят к огромным погрешностям из-за их чрезвычайной чувствительности к ускорению и вибрациям. К слову сказать, «aceleration effect» я не нашел в даташите к A3G4250D от STMicroelectronics. Ниже представлена сравнительная таблица 1.7 для некоторых моделей ММГ более высокого класса.
Таблица 1.7-Сравнительная характеристика моделей ММГ.

В этой таблице представлены датчики, относящиеся к классу точных. И даже для них оба параметра не всегда указываются производителем. Часто для компенсации чувствительности к ускорению пользуются коррекцией по показаниям акселерометра.:
Скомпенсировать g²-чувствительность, если она постоянна, несложно. Но опять же не все производители в даташитах указывают графики для этого параметра. Разработчику часто приходится самому экспериментально строить эти графики. И часто это производится в полевых условиях на уже запущенных в эксплуатацию приборах. Еще одна засада с коррекцией по акселерометрам — согласование фаз. В общем случае собственные частоты акселерометра и гироскопа не совпадают, да и частотные характеристики вообще. Поэтому при различных частотах вибраций ММА и ММГ будут выдавать разные смещения по фазе выходного сигнала относительно вибраций на входе. В конечном итоге коррекция по акселерометру может увеличить погрешность вместо ее гашения. Случится это, если разница между смещениями по фазе ММА и ММГ будет приближаться к значению 3,14 радиан (180 градусов). В итоге, т.к. чувствительность к вибрациям и ускорениям сильно варьируется даже в рамках одной модели датчика или она слишком велика, производитель ее просто не указывает. Правда нужно заметить, на самом деле достаточно трудно протестировать датчики на чувствительность к вибрациям. Проблемы носят как технический, так и методологический характер. Для снижения чувствительности к вибрациям можно, конечно крепить датчики через резиновый изолятор. Но сделать так, чтобы этот подвес имел равномерное распределение характеристик для широкого диапазона частот, да еще и не менял их при старении очень сложно. Ниже на таблице 1.8 представлено сравнение погрешностей из-за чувствительности к ускорению и вибрациям, когда не используется g-компенсация (в гр/сек).
Таблица 1.8.С погрешностей из-за чувствительности к ускорению и вибрациям

А в следующей таблице 1.9 представлены погрешности, которые остаются даже после введения g-компенсации (в гр/сек).
Таблица 1.9-Погрешности, которые остаются после введения g-компенсации.

Как видим даже при введении g-компенсации погрешность от чувствительности к ускорениям все равно может быть больше погрешности от температурной нестабильности нуля (см. график гистерезиса выше).
Выводы
Написанное выше говорит о том, что не всегда самый очевидный параметр точности является и главным критерием выбора датчиков. То, что недостаточно четко описано в даташите или вообще не указано может сыграть решающую роль в успешности проекта. Можно заострить внимание на стабильности нуля и дисперсии шумов, а ведь их можно победить несложными алгоритмами. Долгое время стабильность нуля является золотым стандартом выбора ММГ. Однако на практике большее влияние на точность может оказать чувствительность к ускорениям и вибрациям.
Гироскопы.
EVAL-ADXRS613Z– оценочная плата гироскопа ADXRS613 с диапазоном шкалы ±150°/С (ось Z) компании Analog Devices. Для работы с оценочной платой не требуется дополнительных компонентов. Схемы обработки сигнала, самотестирования и датчик температуры интегрированы в одном чипе с чувствительным элементом (гироскопом).
На EVAL-ADXRS613Z выставлено значение полосы пропускания 10 Гц, но оно может быть самостоятельно изменено пользователем до 3000 Гц.
Отличительные особенности:
датчик и схема обработки сигнала в одном чипе;
устойчивость к нагрузкам до 2000 g;
функция самотестирования;
напряжение питания: 5 В;
температурный диапазон: до 105°С.
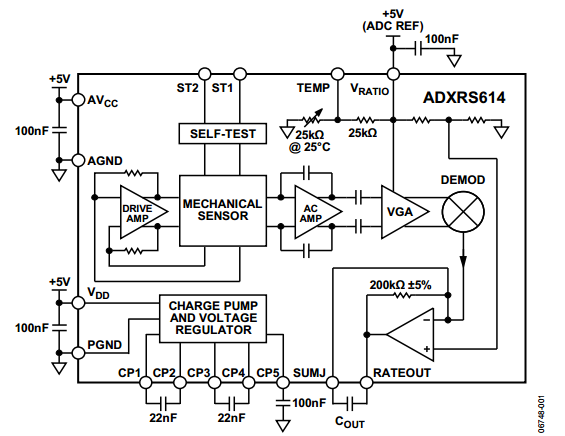
Рисунок 1.11.Функциональная схема EVAL-ADXRS613Z
Акселерометр
ADXL103/ADXL203 – это прецизионные, малопотребляющие, полнофункциональные одноосевой и двухосевой акселерометры с выходным сигналом в виде аналогового напряжения, реализованные в одной монолитной ИМС. Они измеряют ускорение в диапазоне полной шкалы ±1.7 g или ±18 g. ADXL103/ADXL203 способны измерять как динамическое (вызванное, например, вибрацией), так и статическое (вызванное, например, гравитацией) ускорение.
Типичный шумовой порог составляет всего 11010-6 g/√Гц, что позволяет обнаруживать сигналы с ускорением менее 110-3 g (отклонение 0.06°) в задачах измерения отклонения при узкой рабочей полосе (<60 Гц).
Ширина полосы акселерометра выбирается пользователем при помощи конденсаторов CX и CY, подключаемых к выводам XOUT и YOUT. В зависимости от требований конкретного приложение значение ширины полосы может устанавливаться в диапазоне от 0.5 Гц до 2.5 кГц.
ADXL103 и ADXL203 выпускаются в 8-контактном керамическом корпусе LCC, имеющем габариты 5 мм × 5 мм × 2 мм.
ОСОБЕННОСТИ И ПРЕИМУЩЕСТВА
Высококачественный, однокристальный одно-/двухосевой акселерометр
Корпус LCC, 5 мм × 5 мм × 2 мм
Разрешение 1·10-3 g при 60 Гц
Малый потребляемый ток: 700 мкА при VS = 5 В (тип.)
Высокая стабильность смещения нулевого уровня g
Малая погрешность чувствительности
Температурный диапазон от –40°C до +125°C
Погрешность взаимной ориентации осей X и Y 0.1° (тип.)
Регулировка ширины полосы при помощи одного конденсатора
Однополярное питание
Выдерживает ударные нагрузки до 3500 g
Совместим с технологиями свинцовой и бессвинцовой пайки
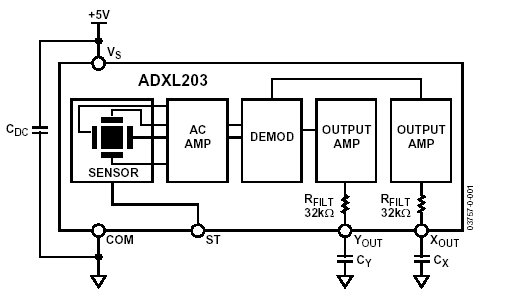
Рисунок 1.12 .Функциональная блок схема ADXL103.
Блок управления бесколлекторным двигателем BLD
Блок управления бесколлекторным двигателем BLD представляет собой электронное устройство, предназначенное для управления трехфазными бесколлекторными двигателями с датчиками Холла. Блок управляет скоростью, ускорением, торможением и направлением движения двигателя . Обеспечивает плавный пуск и остановку двигателя.
Таблица 1.10-Основные характеристики блока управления бесколлекторным двигателем BLD:
Модель |
BLD-20 |
Напряжение,В |
24-48 |
Ток, А |
20 |
Время нарастания скорости, с |
1/3-8 |
Условия эксплуатации блока:
температура окружающего воздуха – (-25…+50)ºС
относительная влажность воздуха до 90%
атмосферное давление (650…800)мм. рт. ст.
Особенности устройства:
Управление скоростью вращение с помощью ШИМ.
Плавное ускорение и торможение двигателя задается пользователем.
Аналоговый датчик скорости, как встроенный, так и внешний.
Входы сигналов направления, тормоза, разрешения.
Автоматическая синхронизация при старте с вращающимся двигателем.
Управление скоростью:
аналоговый вход- напряжение: 0 - 5В- сопротивление: 5 кОм
встроенным потенциометром
Управление направлением:
Направление вращения в момент запуска зависит от положения переключателя "Reverse". В ходе работы направление вращения меняется сигналом "Reverse" - типа сухой контакт.
Для управления ускорением и торможением двигателя предназначен потенциометр «ACCEL». Для резкого торможения предназначена кнопка «BRAKE».
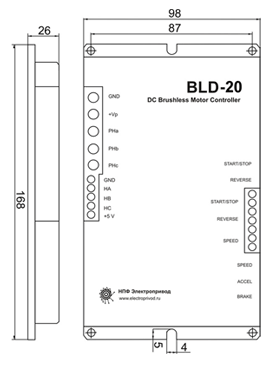
Рисунок 1.13 .Габаритные размера блока управления бесколлекторным двигателем BLD.