

1.2.Функциональная схема автоматизированного электропривода
Рассмотрим на примере электропривода постоянного тока подачи токарного станка.

ic – ток нагрузки;
ωз – задание (0В – стоянка);
εω – ошибка по скорости;
εi – ошибка по току;
СИФУ – система импульсно-фазового управления;
Uу – сигнал управления;
Uзт – задание тока;
УВ – управляемый выпрямитель;
ВС – вентильная схема;
РС – регулятор скорости;
РТ – регулятор тока;
LM – обмотка возбуждения;
Uув – напряжение управления возбуждением;
BR – тахогенератор (ТГ) или другие датчики скорости;
Id – ток якоря;
М – двигатель (motor);
LS – сглаживающий дроссель;
RS – калиброванное сопротивление (шунт).
Датчик скорости – атрибут двигателя, чаще всего это встроенный тахогенератор (ТГ).
Регулятор тока и регулятор скорости, как правило, относятся к системе управления.
Описание работы устройства:
Исходное положение: з=0, Id=0 =0.
Подадим з>0, тогда =з–>0 увеличивается Uзт увеличивается i. Так как Id=0 и I>0, увеличивается Ud и появляется ток якоря Iя растет. Происходит разгон. Разгон продолжается, пока з, то есть =0 и Uзт=iс Uy=Uc – установится постоянный режим.
Аналогично происходит движение с холостого хода на нагрузку.
1.3.Модель механической части электропривода
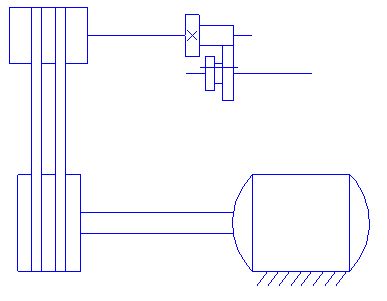
Кинематическая схема реального станка – это многомассовая модель.
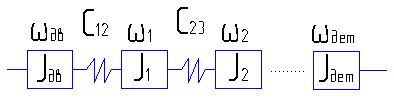

С12 и С23 – конечные жесткости элементов кинематики.
М – электромагнитный момент двигателя.
Мс – момент сопротивления.
Ограничимся упрощенной многомассовой моделью, в которой необходимо привести все массы к одной скорости, как правило, скорости движения двигателя.
Правило знаков: положительное направление выбирается произвольно, но только один раз и только для одной из переменных, обычно это скорость двигателя ω.
Для Мдв положительное направление совпадает с положительным направлением , а для Мс это направление считается отрицательным.
Движение одномассовой модели описывается уравнением:
![]() - основное уравнение движения двигателя.
- основное уравнение движения двигателя.
![]() ,
где
,
где
![]() ,
,
![]() ,
,
![]()
Уравнение движения электропривода должно учитывать все силы и моменты, действующие в переходных режимах (это режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток).
Проведем аналогию с поступательным движением.
Уравнение движения при поступательном движении записывается так:
![]() (1)
(1)
где F – движущая сила, Fс – сила сопротивления двигателя.
Аналогично уравнение равновесия моментов, Н*м, для вращательного движения (уравнение движения привода) имеет следующий вид:
![]() (2)
(2)
Уравнение (2) показывает,
что развиваемый двигателем вращающий
момент М за вычетом момента сопротивления
Мс на его валу обуславливает
угловое ускорение
![]() .
Поэтому величину М - Мс
назывют динамическим моментом.
.
Поэтому величину М - Мс
назывют динамическим моментом.
Из анализа уравнения (2) видно:
1) при M
> Mc
![]() ,
т.е. происходит ускорение привода (w
– увеличивается);
,
т.е. происходит ускорение привода (w
– увеличивается);
2) при M
< Mc
![]() ,
т.е. происходит замедление привода
(очевидно, что замедление привода может
быть и при отрицательном значении
момента двигателя; w –
уменьшается)
,
т.е. происходит замедление привода
(очевидно, что замедление привода может
быть и при отрицательном значении
момента двигателя; w –
уменьшается)
3) при M-
Mc =
0,
![]() ;
то есть привод работает в установившемся
режиме (w = const)
;
то есть привод работает в установившемся
режиме (w = const)
Вращающий момент, развиваемый двигателем при работе, принимается положительным, если он направлен в сторону положительного направления скорости движения привода. Если он направлен в сторону обратную положительного направления скорости, то он считается отрицательным.