

4.3.Выбор мощности двигателя
Это не единственный подход – может выбираться момент Мном>Мmax
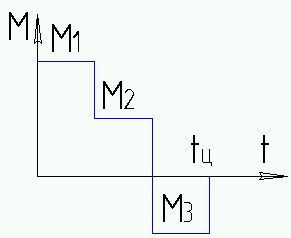
1. Определение режима двигателя
2. Р=М∙
3. Рном=1,3Р, где 1,3 – коэффициент запаса
Выбор двигателя производится по тепловому режиму и стандартной ПВ.
Мощность двигателя
может быть приведена по следующему
выражению:
![]()
4.3.1.Метод средних потерь
М етод
позволяет усреднить потери за цикл
работы и свести выбор двигателя по
нагреванию к проверке условия Рном>Рср,
то есть к сравнению потерь энергии в
номинальном режиме к средним реальным
потерям энергии за цикл работы. Под
средними понимают потери, которые
оказывают такое же тепловое действие,
как номинальный переменный график
потерь.
етод
позволяет усреднить потери за цикл
работы и свести выбор двигателя по
нагреванию к проверке условия Рном>Рср,
то есть к сравнению потерь энергии в
номинальном режиме к средним реальным
потерям энергии за цикл работы. Под
средними понимают потери, которые
оказывают такое же тепловое действие,
как номинальный переменный график
потерь.
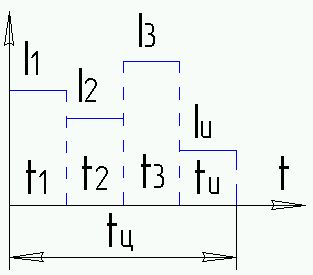
Рис.1
где ΔРi – мощность потерь на i – ом интервале;
ti – продолжительность i – ого интервала;
n – число интервалов в цикле.
tц – время цикла.
Найденные средние
потери за цикл сопоставляются с
номинальными, и если
![]() ,
то среднее превышение температуры не
больше допустимого значения, то есть
,
то среднее превышение температуры не
больше допустимого значения, то есть
![]() .
.
Если средние потери
за цикл
![]() ,
то двигатель будет перегреваться и
наоборот, при условии, что
,
то двигатель будет перегреваться и
наоборот, при условии, что
![]() ,
двигатель недоиспользуется по нагреву.
В обоих случаях необходимо выбрать
другой двигатель, построить новую
зависимость
,
двигатель недоиспользуется по нагреву.
В обоих случаях необходимо выбрать
другой двигатель, построить новую
зависимость
![]() и вновь проверить двигатель методом
средних потерь.
и вновь проверить двигатель методом
средних потерь.
Из этого метода могут быть получены методики расчета в разных режимах, в том числе и с переменным графиком нагрузки.
В том случае, когда на протяжении цикла теплоотдача двигателя на отдельных интервалах различна, например, в случае изменения угловой скорости самовентилируемого двигателя, средние эквивалентные потери подсчитывают по формуле
 (1)
(1)
где β,- — коэффициент ухудшения теплоотдачи на i-м интервале, соответствующий значению угловой скорости на этом интервале.
Приближенно зависимость коэффициента ухудшения теплоотдачи от угловой скорости можно считать линейной:
![]()
где
![]() — коэффициент ухудшения теплоотдачи
при неподвижном
якоре (роторе).
— коэффициент ухудшения теплоотдачи
при неподвижном
якоре (роторе).
Порядок расчета мощности по методу средних потерь
1) По нагрузочной
диаграмме механизма определяем
среднюю мощность
на валу двигателя в случае постоянства
теплоотдачи и
угловой скорости двигателя
![]() ,
(2)
,
(2)

2. На основании полученной расчетной мощности по каталогу выбираем соответствующий двигатель.
3. 3. Учитываем потери
П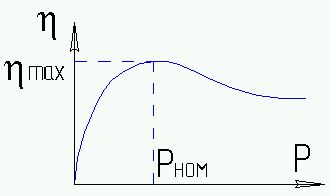 о
зависимости
о
зависимости
![]() устанавливают i
для каждого участка
устанавливают i
для каждого участка
3. Располагая кривыми КПД двигателя в функции нагрузки при разных угловых скоростях, находим потери мощности для каждого интервала нагрузочной диаграммы и строим график (рис.1).
По (1) или (2) определяем средние потери за цикл, которые и сопоставляем с номинальными:
![]()
4.3.2.Метод эквивалентного тока
В случае возникновения затруднений с определением КПД в зависимости от нагрузки, но при наличии графика тока, потребляемого двигателем, можно воспользоваться для проверки выбранного двигателя методом эквивалентного тока.
:
Эквивалентный ток – постоянный ток, который вызывает такие же потери, как и фактический изменяющийся ток на графике.
Потери в двигателе
для ДПТ
![]() - сумма
- сумма
После подстановки и
сокращений получаем

Расчет мощности двигателя со стандартного ПВ на нестандартный
![]() и
и


![]()
![]() ,
где 0 –
коэффициент ухудшения теплоотдачи на
время стоянки
,
где 0 –
коэффициент ухудшения теплоотдачи на
время стоянки
![]() ,
где
,
где
![]()
![]() ,
,
![]() и
и
![]()
Считаем, что Iр известно для двух продолжительных включений
![]()
![]()
![]()
После нахождения
эквивалентного тока сопоставляем его
с номинальным током двигателя: при
![]() двигатель отвечает условиям полного
использования по нагреву.
двигатель отвечает условиям полного
использования по нагреву.
Следует отметить, что метод эквивалентного тока предполагает независимость (постоянство) потерь на возбуждение, потерь в стали и механических потерь от нагрузки и постоянство сопротивления главной цепи двигателя на всех участках графика нагрузки.