

3.2.2.Шаговые двигатели
Шаговые, или импульсные двигатели питаются импульсами электрической энергии, а ротор в зависимости от полярности импульсов перемещается по часовой стрелке или против часовой стрелки на определенный угол-шаг. Шаговые двигатели обычно маломощные индикаторные. Основная задача их отрабатывать электрические импульсы, преобразуя электрические сигналы в угловые перемещения.
Для управления шаговыми двигателями используются коммутаторы на полупроводниковых элементах, формирующие импульсы, которые подаются на фазы обмотки шагового двигателя. Число фаз выбирается равным четырем или шести. Шаг двигателя может быть от 180 до 1°. В специальных установках шаг может быть несколько минут.
Шаговые двигатели могут быть выполнены на основе конструкции любых синхронных двигателей. Так как основным требованием к шаговым двигателям является точность отработки сигналов и высокая частота импульсов, предпочтительны конструкции шагового двигателя, выполненного на базе реактивных и индукторных синхронных машин.
Шаговые двигатели характеризуются предельной частотой импульсов, которые двигатель обрабатывает без пропуска шага. Пусковые свойства шаговых двигателей характеризуются частотой приемистости — максимальной частотой импульсов, при которой возможен пуск без потери шагов. В зависимости от типа шагового двигателя и нагрузки частота приемистости колеблется от 10 до 104 Гц.
Математическое описание процессов преобразования энергии при импульсном питании осуществляется по уравнениям электромеханического преобразования энергии и их видоизменениям, когда форма напряжения — импульсная.
С четчик
подсчитывает количество fп
– прямых и fн –
обратных "шагов".
четчик
подсчитывает количество fп
– прямых и fн –
обратных "шагов".
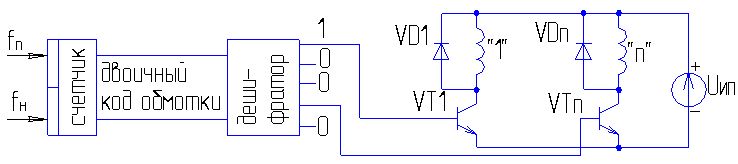
Одновременно включена только одна обмотка.
![]()
p – число пар полюсов;
m – фазность двигателя.
Характеристики двигателя:
1 .
М – цена
импульса; определяет угловой шаг,
совершаемый двигателем при единичном
переключении (угол поворота за шаг).
.
М – цена
импульса; определяет угловой шаг,
совершаемый двигателем при единичном
переключении (угол поворота за шаг).
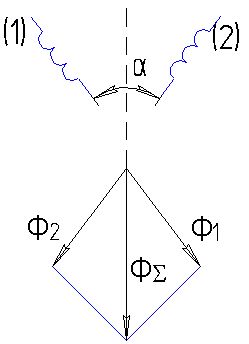
2. Угловая характеристика двигателя
Для активного ротора:
угол снят для однополюсной однофазной машины.
 =90
- нулевой момент; при >90
момент меняет знак.
=90
- нулевой момент; при >90
момент меняет знак.
Двигатель выполняет свои функции только в этом диапазоне изменения углов.
Мст – максимальный момент удержания.
При большой внешней нагрузке возможна потеря шага.
3. Частота приемистости – максимальная частота, до которой разгоняется двигатель при скачкообразном приложении импульсов из состояния покоя. Разгон при этом происходит за период одного импульса (подразумевается пуск на холостом ходу, то есть без нагрузки и присоединенных маховых масс). Если подавать импульсы часто, то наступит такая частота, которую двигатель не обработает.
4. Предельная динамическая характеристика – характеристика, связывающая частоту приемистости и момент инерции присоединенного к двигателю механизма.
Характеристика входит в документацию.
М 2>М1
fп2<fп1
2>М1
fп2<fп1
Число шагов двигателя на оборот.
Для двигателя с активным ротором:
Число шагов зависит от способа управления:
симметричный (поочередное включение каждой обмотки) и несимметричный (одновременно может включаться несколько обмоток)
С помощью несимметричного способа управления можно получить дополнительные положения ротора.
Например, достигнуть углового шага /2.
однополярный и разнополярное (удвоение числа возможных положений)
При однополярном симметричном управлении число положений n=pm, где р – число пар полюсов; m – число фаз двигателя.
р = число параллельных ветвей в любой фазе.
При однополярном несимметричном управлении n=2pm
При разнополярном несимметричном управлении n=4pm
Для двигателя с пассивным (перемагничиваемым) ротором:
z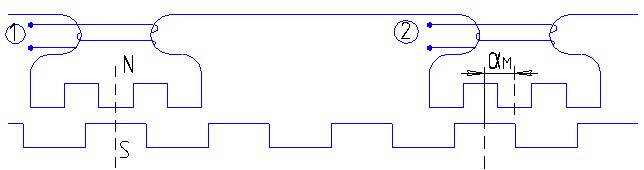 ротора=zстатора-1
ротора=zстатора-1
Пусть ток подан в обмотку на роторе появляется магнитное поле, которое противоположно магнитному полю статора, и полюса притягиваются. При этом минимизируется энергия электромагнитного поля за счет поворота ротора. Она минимальна, когда картина магнитных силовых линий слева и справа от оси симметрична, что соответствует совпадению осей зубцов.
Выключим ток в обмотке
и включим в
обмотке . Число
зубцов меньше
картина силовых линий несимметрична
появляется усилие, смещающее ротор до
центра симметрии, двигатель шагает на![]() ,
где zр – число зубцов
ротора число
положений, которые может принять ротор
,
где zр – число зубцов
ротора число
положений, которые может принять ротор
![]() .
.
Такой двигатель удобен для глубокого редуцирования ротора (получения большого числа шагов).
Низковольтные двигатели: серии ДШ, ДША, ДШБ отличаются числом пар полюсов.

Более подробно о двигателях можно узнать из следующей литературы:
Копылов, Клоков. Справочник, 1988 г.
Кенио. Управление ШД.
Волков, Миловзоров. Выбор ШД (брошюра), 1978 г.